SIFT特征提取算法总结
转自:http://www.jellon.cn/index.php/archives/374
一、综述
Scale-invariant feature transform(简称SIFT)是一种图像特征提取与匹配算法。SIFT算法由David.G.Lowe于1999年提出,2004年完善总结,后来Y.Ke(2004)将其描述子部分用PCA代替直方图的方式,对其进行改进。SIFT算法可以处理两幅图像之间发生平移、旋转、尺度变化、光照变化情况下的特征匹配问题,并能在一定程度上对视角变化、仿射变化也具备较为稳定的特征匹配能力。
二、SIFT特征提取算法
SIFT算法首先在尺度空间进行特征检测,并确定关键点的位置和关键点所处的尺度,然后使用关键点邻域梯度的主方向作为该点的方向特征,以实现算子对尺度和方向的无关性。
SIFT算法提取的SIFT特征向量具有如下特性:
a) SIFT特征是图像的局部特征,其对旋转、尺度缩放、亮度变化保持不变性,对视角变化、仿射变换、噪声也保持一定程度的稳定性。
b) 独特性好,信息量丰富,适用于在海量特征数据库中进行快速、准确的匹配。
c) 多量性,即使少数的几个物体也可以产生大量SIFT特征向量。
d) 高速性,经优化的SIFT匹配算法甚至可以达到实时的要求。
e) 可扩展性,可以很方便的与其他形式的特征向量进行联合。
一幅图像SIFT特征向量的生成算法总共包括4步:尺度空间极值检测、关键点位置及尺度确定、关键点方向确定、特征向量生成。最后通过特征向量完成特征点的匹配。
2.1尺度空间极值检测
机器人在环境中走动时,摄像机和环境中物体的相对位置会发生变化,导致图像上物体的特征的尺度发生变换。我们希望特征具有尺度不变性,即当特征尺度变化时,特征点检测器仍然能够准确的检测出特征点及其尺度。为满足以上条件,特征检测需要在多尺度空间的框架下进行。
尺度空间理论是检测不变特征的基础。Witkin(1983)提出了尺度空间理论,他主要讨论了一维信号平滑处理的问题。Koenderink(1984)把这种理论扩展到二维图像,并证明高斯卷积核是实现尺度变换的唯一变换核。
二维高斯函数定义如下:

一幅二维图像,在不同尺度下的尺度空间表示可由图像与高斯核卷积得到:

其中(x,y)为图像点的像素坐标,I(x,y)为图像数据。σ称为尺度空间因子,它也是高斯正态分布的方差,其反映了图像被平滑的程度,其值越小表征图像被平滑程度越小,相应尺度越小。L代表了图像的尺度空间。
为高效的在尺度空间内检测出稳定的特征点,Low使用尺度空间中DoG
(Difference -of-Gaussian)极值作为判断依据。DoG算子定义为两个不同尺度的高斯核的差分,是归一化LoG (Laplacian-of-Gaussian)算子的近似。设k为两相邻尺度间的比例因子,则DoG算子定义如下:

选择DoG算子作为检测函数有一定的原因。首先,DoG算子计算简单,只需要将两个高斯平滑后的图像L相减即能得到,执行效率较高;其次,DoG算子检测出的特征点稳定性较好,与LoG检测效果相近(Mikolajczyk 2002)。
Lowe采用的 构造方式如图1,其建立高斯图像(图中左列)与DoG(图中右列)两个金字塔。高斯图像金字塔分为多组,每组间又分为多层。一组中的多层间不同的是尺度,相邻层间尺度相差一个比例因子k。为在S个尺度间隔内变化尺度因子,如使σ加倍,则k应为
构造方式如图1,其建立高斯图像(图中左列)与DoG(图中右列)两个金字塔。高斯图像金字塔分为多组,每组间又分为多层。一组中的多层间不同的是尺度,相邻层间尺度相差一个比例因子k。为在S个尺度间隔内变化尺度因子,如使σ加倍,则k应为 。而为了在整个金字塔内获取DoG极值,应在高斯金字塔中生成S+3层高斯平滑图像。下一组的图像的最底层由上一组中尺度为2σ的图像进行因子为2的降采样得到,其中σ为上一组中最底层图像的尺度因子。DoG金字塔由相邻的高斯图像金字塔相减得到。
。而为了在整个金字塔内获取DoG极值,应在高斯金字塔中生成S+3层高斯平滑图像。下一组的图像的最底层由上一组中尺度为2σ的图像进行因子为2的降采样得到,其中σ为上一组中最底层图像的尺度因子。DoG金字塔由相邻的高斯图像金字塔相减得到。

图1 高斯图像金字塔(S=2)与DoG金字塔
金字塔中每个高斯图像的σ为:

其中 为基础尺度因子;o, s分别为图像所在的图像组坐标、组内层坐标,
为基础尺度因子;o, s分别为图像所在的图像组坐标、组内层坐标, ,
, ,(实际应为
,(实际应为 ,为在整个金字塔内获取DoG极值,有S+3层高斯平滑图像);
,为在整个金字塔内获取DoG极值,有S+3层高斯平滑图像); 是第一个金字塔组的坐标,通常
是第一个金字塔组的坐标,通常 取0或者-1,当设为-1的时候,则图像在计算高斯尺度空间前先扩大一倍。在Lowe的算法实现中以上参数分别取值如下:
取0或者-1,当设为-1的时候,则图像在计算高斯尺度空间前先扩大一倍。在Lowe的算法实现中以上参数分别取值如下: ,
, ,
, 。
。
另外,空间坐标x是组坐标o的函数。设 第o组内的空间坐标,则有:
第o组内的空间坐标,则有:

其中 是第o组中图像的分辨率。设
是第o组中图像的分辨率。设 为第0组中的图像分辨率,则其他组的分辨率为:
为第0组中的图像分辨率,则其他组的分辨率为:

金字塔构造完后开始检测DoG局部极值。其中每个像素需要跟同一尺度的周围邻域8个像素和相邻尺度对应位置的周围邻域9*2个像素总共26个像素进行比较,如图2。仅当被检测点的DoG值大于此26个像素点或小于此26个像素点时才将该点判定为极值点并保存以进行后续计算。

图2 DoG空间局部极值检测
2.2关键点位置及尺度确定
通过拟和三维二次函数以精确确定关键点的位置和尺度(如图3),同时去除低对比度的关键点。其中Lowe使用了DoG函数的泰勒公式展开的方法(Brown and Lowe, 2002)。

图 3 精确确定关键点位置和尺度
去除不稳定的边缘响应点,以增强匹配稳定性、提高抗噪声能力。其使用的边缘相应检测算子为:

H为Hessian矩阵。Lowe在实现时取r=10。
2.3关键点方向确定
通过确定关键点的方向,可以使特征描述符以与方向相关的方式构造,从而使算子具有旋转不变性。关键点的方向利用其邻域像素的梯度分布特性确定。对每个高斯图像,每个点 的梯度的模
的梯度的模 与方向
与方向 可以通过如下公式计算得到:
可以通过如下公式计算得到:


其中L所用尺度为关键点所在尺度。
对每个关键点,在以其为中心的邻域窗口内利用直方图的方式统计邻域像素的梯度分布。此直方图有36个柱,每柱10度,共360度。每个加入直方图的邻域像素样本的权重由该像素的梯度模与高斯权重确定。此高斯窗的σ为关键点的尺度的1.5倍,加入高斯窗的目的是增强离关键点近的邻域点对关键点的影响。
直方图的峰值反映了关键点所处邻域梯度的主方向。完成直方图统计后,找到直方图的最高峰值以确定关键点的方向。关键点的方向可以由离最高峰值最近的三个柱值通过抛物线插值精确得到。如图4。

图4 由梯度方向直方图确定主梯度方向
在梯度方向直方图中,当存在一个大于等于主峰值80%能量的峰值时,则添加一个新关键点,此关键点的坐标、尺度与当前关键点相同,但方向为由此峰值确定的方向。因此一个关键点可能产生多个坐标、尺度相同,方向不同的关键点。这样做的目的是增强匹配的鲁棒性。
至此,特征点检测完毕,特征描述前的准备工作已经完成。每个关键点含有三个信息:坐标、尺度、方向。
2.3特征向量生成
设特征点的方向是θ,则先将特征点的邻域旋转-θ角度,这样保证了旋转不变性。然后将邻域划分为4×4=16块,对每一块利用特征点方向确定时采用的方法统计一个梯度直方图,每个直方图有8个柱,如图5。这样得到一个4×4x8=128维的特征向量。此时SIFT特征向量已经去除了尺度变化、旋转等几何变形因素的影响。

图5 特征点的特征向量构造
最后要对特征向量进行处理以使其适应光照变化。首先要对特征向量进行归一化。图像发生对比度变化表现为每个像素点的值以及该点梯度方向的模均变为原来的常数倍,因此对特征向量进行归一化能消除图像对比度变化的影响。光照强度变化理论上不会对特征向量产生影响,因为光照强度变化表现为每个像素点的值增加了一个常数,因此像素点间的差值没有发生改变,梯度值即没有发生变化。至此特征向量已对光照的仿射变化具有了不变性。然而非线性的光照变化也可能发生,此时对像素点梯度方向产生影响相对较小,而对梯度的模产生较大影响。为了减小值较大的梯度的模的影响,我们可以设定一个阈值,使特征向量中的128项均小于等于该阈值,最后再对特征向量进行一次归一化即可。Lowe算法中设定此阈值为0.2。
2.4特征点匹配
当两幅图像的SIFT特征向量生成后,下一步将采用关键点特征向量的欧式距离来作为两幅图像中关键点的相似性判定度量。
然而由于遮挡等原因,匹配可能出现错配的情况,需要采取一些措施降低错配率。为每对匹配特征点的特征向量欧式距离加阈值的方法并不合适,因为特征点可能有较强的独特性,其匹配点对特征向量的欧式距离较大是正常的。一种比较有效的方法是在匹配时比较与关键点的特征向量最近的和次近的关键点。取图像1中的某个关键点,并找出其与图像2中欧式距离最近的前两个关键点,在这两个关键点中,如果最近的距离除以次近的距离少于某个比例阈值,则接受这一对匹配点,如下式子:

降低这个比例阈值,SIFT匹配点数目会减少,但更加稳定。Lowe在实现过程中取r=0.8,此时虽然会去掉约5%的正确匹配,但同时会去掉约90%的错误匹配。
转自:http://bubblexc.com/y2011/163/
SIFT是我接触最早的图像局部特征描述子之一,其实最初,始终觉得局部特征描述子是些非常玄虚的东西。对于SIFT,这种感觉更是尤为强烈,“尺度空间”“拉普拉斯高斯算子(LoG)”“高斯差分金字塔”,一系列让人头痛的概念。不过,反反复复看了几次,渐渐也就有了感觉,在此总结一下。
物体识别的核心问题是将同一目标在不同时间、不同分辨率、不同光照、不同位姿情况下所成的像相相匹配。而为了进行匹配,我们首先要合理的表示图像。由于目标的自身状态、场景所处的环境的影响,同一类物体在不同的图像中所成的像往往会差别很大,但即使这样,人们所能通过同一物体的一些局部共性来识别出物体(正如我们能将不同国家民族的人区分出来)。所谓局部特征描述子就是用来刻画图像中的这些局部共性的,而我们也可以将一幅图像映射(变换)为一个局部特征的集合。理想的局部特征应具有平移、缩放、旋转不变性,同时对光照变化、仿射及投影影响也应有很好的鲁棒性。传统的局部特征往往是直接提取角点或边缘,对环境的适应能力较差。1999年British Columbia大学 David G.Lowe(http://www.cs.ubc.ca/~lowe/) 教授总结了现有的基于不变量技术的特征检测方法,并正式提出了一种基于尺度空间的、对图像缩放、旋转甚至仿射变换保持不变性的图像局部特征描述算子-SIFT(尺度不变特征变换),这种算法在2004年被加以完善。
SIFT算法的实质可以归为在不同尺度空间上查找关键点(特征点)的问题。所谓关键点,就是一些十分突出的点,这些点不会因光照条件的改变而消失,比如角点、边缘点、暗区域的亮点以及亮区域的暗点,既然两幅图像中有相同的景物,那么使用某种方法分别提取各自的稳定点,这些点之间就会有相互对应的匹配点。而在SIFT中,关键点是在不同尺度空间的图像下检测出的具有方向信息的局部极值点。涉及到的最重要的两步是:1.构建尺度空间 2.关键点检测
· 构建尺度空间
先来谈谈尺度的问题。我们要精确表示的物体都是通过一定的尺度来反映的。现实世界的物体也总是通过不同尺度的观察而得到不同的变化。比如说,对同一物体拍照,我们拍摄了一副近景,一副远景,虽然两幅图片中都有这个物体,但这个物体确是处于两个不同的尺度。SIFT特征具有尺度不变性,就是说即使同一物体处于两个不同的尺度的图像中,我们仍可以通过提取图像的SIFT特征匹配成功。
图像的尺度有多种表示方法(金字塔、八叉树等等),在SIFT中Lowe教授采用了尺度空间理论。其主要思想是通过对原始图像进行尺度变换,获得图像多尺度下的尺度空间表示序列,并检测这个序列中的关键点。这样图片就被映射为多个尺度上的关键点信息,尽管两幅图片是处于不同的尺度,但却可以提取出在尺度变换中没有改变的关键点,从而进行关键点匹配,进而识别出物体。
实际上,在尺度空间理论中,是通过对图像进行模糊来模拟多尺度下的图像。直观上,图像的模糊程度逐渐变大,模拟了人在距离目标由近到远时目标在视网膜上的形成过程。文献《Scale-space theory: A basic tool for analysing structures at differentscales》(http://www.csc.kth.se/~tony/abstracts/Lin94-SI-abstract.html)证明,高斯核是唯一可以产生多尺度空间的核(其它核会对图像造成模糊之外的其它影响)。一个图像的尺度空间, L(x,y,σ) (σ 可以代表尺度的大小),定义为原始图像 I(x,y) 与一个可变尺度的2维高斯函数 G(x,y,σ) 卷积运算。高斯函数:
G(x,y,σ)=
1/2πσ2e[−(x2+y2)/(2σ2)]
L(x,y,σ)=G(x,y,σ)∗I(x,y)
需要的注意的是,图像的尺度是自然存在的,不是人为创造的!高斯卷积只是表现尺度空间的一种形式。(在SIFT的代码中,进行高斯模糊时,用到了高斯模糊的“勾股定理”:例如,使用半径分别为 6 和 8 的两次高斯模糊变换得到的效果等同于一次半径为 10 的高斯模糊效果)。
在SIFT中,构建了高斯金字塔(如图1所示),即分为两步:1)对图像做高斯平滑 2)对图像做降采样(减小计算量)。一幅图像可以产生几组(octave)图像,一组图像包括几层(interval)图像。为了让尺度体现出连续性,相邻两层图像间的尺度为k倍的关系,同时相邻两组的同一层尺度为2倍的关系(在SIFT算法中,Lowe教授假设初始图片已经是以一定 σ 模糊过得了)。
· 关键点检测
文献《Scale-spacetheory: A basic tool for analysing structures at different scales》(http://www.csc.kth.se/~tony/abstracts/Lin94-SI-abstract.html)指出尺度规范化的LoG算子具有真正的尺度不变性。即我们可以在不同尺度的图像(已经经过高斯卷积)上进行拉普拉斯运算(二阶导数),并求极值点,从而求出关键点。但这样做的运算量很大,于是SIFT中进行了近似处理:
∇2G=∂2G∂x2+∂2G∂y2
LOG(x,y,σ)=σ2∇2G≈Gauss(x,y,kσ)−Gauss(x,y,σ)σ2(k−1)
G(x,y,kσ)−G(x,y,σ)≈(k−1)σ2∇2G
通过推导可以看出,LoG算子与高斯核函数的差有直接关系,由此引入一种新的算子DoG(Difference of Gaussians),即高斯差分算子:
D(x,y,σ)=[
G(x,y,kσ)−G(x,y,σ)]∗I(x,y)=L(x,y,kσ)–L(x,y,σ)
可以看出,LoG算子和DoG算子指相差常数系数,而这并不会改变极值点的位置。因此我们在DoG算子中求得极值点就是LoG算子的极值点,也正是我们需要的关键点。而DoG在计算上只需相邻尺度高斯平滑后图像相减,因此简化了计算!
对应DOG算子,我们要构建DOG金字塔
如下图,我们可以通过高斯差分图像看出图像上的像素值变化情况。如果没有变化,也就没有特征。特征必须是变化尽可能多的点。本质上,DOG图像描绘的是目标的轮廓。
关键点是由DOG空间的局部极值点组成的。为了寻找DoG函数的极值点,每一个像素点要和它所有的相邻点比较,看其是否比它的图像域和尺度域的相邻点大或者小。具体来说,中间的检测点和它同尺度的8个相邻点和上下相邻尺度对应的9×2个点共26个点比较,以确保在尺度空间和二维图像空间都检测到极值点。
至此就可以检测出图像中尺度不变的关键点,然后我们为关键点赋予梯度方向,并利用关键点的周围的像素梯度方向直方图生成SIFT特征描述子。具体过程可以参考以下资料
1、SIFT的matlab程序,非常详细 http://www.vlfeat.org/~vedaldi/code/sift.html
2、SIFT tutorial http://www.aishack.in/2010/05/sift-scale-invariant-feature-transform/
3、一个非常详细ppt教程,可用作教学http://wenku.baidu.com/view/53021cf24693daef5ef73daf.html
相关文章:

一步步构建大型网站架构
之前我简单向大家介绍了各个知名大型网站的架构,MySpace的五个里程碑、Flickr的架构、YouTube的架构、PlentyOfFish的架构、WikiPedia的架构。这几个都很典型,我们可以从中获取很多有关网站架构方面的知识,看了之后你会发现你原来的想法很可能…

商汤科技举办病理、放疗两大MICCAI国际挑战赛,推动AI医疗落地
近日,商汤科技宣布将联合衡道病理、上海交通大学医学院附属瑞金医院、西京医院、上海市松江区中心医院举办MICCAI 2019消化道病理图像检测与分割国际挑战赛,联合医诺智能科技、浙江省肿瘤医院举办MICCAI 2019放疗规划自动结构勾画国际挑战赛,…

vue实战(1)——解决element-ui中upload组件使用多个时无法绑定对应的元素
解决element-ui中upload组件使用多个时无法绑定对应的元素 以前写的项目关于图片上传的都是单张或几张图片上传(主要是基于vue的element),图片路径都是固定写的,所以遇见过列表中多个上传图片的问题,先看下常用的形式 …

MVVM开发模式MVVM Light Toolkit中使用事件和参数传递
Light中定义了类GalaSoft.MvvmLight.Command.RelayCommand这个类继承了ICommand方法,实现了其中的方法,Action就是一个方法参数// 摘要: // A command whose sole purpose is to relay its functionality to other objects // by invoki…
harris角点检测与ncc匹配
转自:http://zixuanjinan.blog.163.com/blog/static/11543032620097510122831/ file1:-------------------------------------------------------------------------------------- function [y1,y2,r,c]harris(X)% 角点的检测,利用harris 算法% 输出的是…

CVPR 2019超全论文合集新鲜出炉!| 资源帖
整理 | 夕颜出品 | AI科技大本营(ID: rgznai100)实不相瞒,这是一个资源福利帖——CVPR 2019 接收论文超全合集!此前关于 CVPR 2019 论文和合集出过不少,但是这个可能是最全面最丰富的,链接奉上:…
ROS 用 roboware实现节点信息发送和接收
在ros下实现节点编程,实现一个节点发送消息,另一个节点接收。实现方式有多种,可以直接在命令窗口创建工作空间包以及节点,用catkin_make进行编译,添加.bash路径,然后执行rosrun package node_name 。这种…
javah生成JNI头文件
Administratoribm /cygdrive/z/workspace/com.example.hellojni.hellojni/src <---- 从此文件夹执行 javah *************** project root dir ******************* *** source dir *** javah -jni -classpath . com.example.hellojni.HelloJni*** package name *** ** c…

【码书】一本经典且内容全面算法书籍,学算法必备
之前推荐了好几本算法书,有《啊哈!算法》,有《算法图解》,有《漫画算法》,也有《我的第一本算法书》,很多粉丝不乐意了,觉得我推荐了这么多算法书籍,竟然没有经典算法书籍《算法导论…
Ubuntu16.04.1 安装Nginx
Nginx ("engine x") 是一个高性能的 HTTP 和 反向代理 服务器,也是一个 IMAP/POP3/SMTP 代理服务器。 Nginx 是由 Igor Sysoev 为俄罗斯访问量第二的 Rambler.ru 站点开发的,第一个公开版本0.1.0发布于2004年10月4日。其将源代码以类BSD许可证…
linux下jboss的安装配置
闲来无事突然间想到和tomcat相同的java容器jboss,就想测试一下jboss和tomcat性能的差异之处。但是之前只安装过tomcat,想来跟tomcat安装方式应该是相同的都需要jdk的支持。查找资料后进行了安装。一下是我安装jboss的一些步骤:Linux版本&…
RANSAC鲁棒参数估计
转自:http://blog.csdn.net/zhanglei8893/archive/2010/01/23/5249470.aspx RANSAC 是"RANdom SAmple Consensus"的缩写。该算法是用于从一组观测数据中估计数学模型参数的迭代方法,由Fischler and Bolles在1981 提出,它是一种非确…

AlphaGo之父DeepMind再出神作,PrediNet原理详解
作者 | beyondma转载自CSDN博客近期,DeepMind发表论文,称受Marta Garnelo和 Murray Shanahan的论文“Reconciling deep learning with symbolic artificial intelligence: representing objects and relations”启发,他们提出了一种新的架构…
php中file_get_contents如何读取大容量文件
php中file_get_contents如何读取大容量文件 一、总结 一句话总结:使用file_get_contents()进行分段读取,file_get_contents()函数可以分段读取 1、读取大文件是,file_get_contents()函数为什么会发生错误? 发生内存溢出而打开错误…

Vmware虚拟机的复制后无法使用的问题和解决
为什么80%的码农都做不了架构师?>>> 我在自己的机器上用Vmware安装的Ubuntu 12.04系统,并在里面部署了Openstack的开发环境,部署的过程有些复杂,不希望再次重复这个过程,于是就复制整个的虚拟机文件到其他…

Facebook频谱图模型生成比尔·盖茨声音,性能完胜WaveNet、MAESTRO
作者 | James Vincent 等编译 | 夕颜、Monanfei出品 | AI科技大本营(ID:rgznai100)计算机生成语音领域,正在酝酿着和一场革命。Facebook 工程师们设计创建的机器学习模型 MelNet 就是一个启示。下面这段听起来怪异的话像极了比尔盖茨是吧&…
数据表设计的原则
如何设计数据表: 三个范式 ER图
图像配准----Harris算子
Harris算子是C.Harris和M.J.Stephens在1988年提出的一种特征点提取算子。它用一阶偏导来描述亮度变化,这种算子受信号处理中自相关函数的启发,给出与自相关函数相联系的矩阵M。M矩阵的特征值是自相关函数的一阶曲率,如果两个曲率值都高&#…
关于ORA-01950: no privileges on tablespace 的解决
前天晚上,本想在家里搭一个公司项目的开发环境,以便在工作忙的时候做点“家庭作业”。下班之前,通过PLSQL Developer导数据库时,不知道什么原因,以.dmp格式导出时总不成功,于是选择以.sql格式导出ÿ…

继往开来!目标检测二十年技术综述
作者 | 周强来源 | 我爱计算机视觉(id:aicvml)计算机视觉中的目标检测,因其在真实世界的大量应用需求,比如自动驾驶、视频监控、机器人视觉等,而被研究学者广泛关注。几天前,arXiv新出一篇目标检…
python+selenium百度贴吧自动签到
#-*- coding:utf-8 -*- from selenium import webdriver import time import os import random from selenium.webdriver.common.action_chains import ActionChainsbrowser webdriver.Chrome()# 最大等待加载完的时间 max_loading 600 # 延时随机n秒执行 wait_time random.…
图像配准----NCC
在用Harris算子对图像进行角点提取后,两幅图像得到的角点个数不一定相等,这时就要先对它们进行处理,得出一一对应的角点对。 归一化互相关(Normalized Cross Correlation method, NCC)匹配算法是一种经典的统计匹配算法,通过计算模…

Ext Scheduler Web资源甘特图控件
原文来自 http://www.fanganwang.com/Product-detail-item-1430.html欢迎转载。 关键字: 资源甘特图又叫负荷图,其纵轴不再列出活动,而是列出整个部门或特定的资源。 Ext Scheduler资源甘特图是基于Extjs核心库的开发的,基于WEB浏…

50行代码教AI实现动作平衡 | 附完整代码
作者 | Mike Shi译者 | linstancy责编 | Jane出品 | AI科技大本营(id:rgznai100)【导读】本文将为大家展示如何通过 Numpy 库和 50行 Python 代码,使用标准的 OpenAI Gym平台创建智能体 (agent),就教会机器处理推车杆问…
图像配准----双向匹配
由Harris提取出的两幅图像的角点个数或对应关系并不是一一对应的。为了后续的配准,需要先对提取出的角点进行初始匹配,双向匹配方法是比较简单的一种方法,它实现容易。 设参考图像特征点集为X {x1, x2, …,xp}, p > 3;待配准图…
[专业亲测]Ubuntu16.04安装Nvidia显卡驱动(cuda)--解决你的所有困惑【转】
本文转载自: 因为要做毕设需要安装caffe2,配置cuda8.0,但是安装nvidia驱动真的是把我难倒了,看了很多篇博文都没有效果,现在我自己重新总结了下几种 安装方法(亲测有效),希望能帮到大…
IE下javascript的console方法
IE下javascript的console方法 FireFox 和 Chrome 下调试JS都有console,IE6下没有。特用此办法来兼容IE6. <br /><pre lang‘‘html‘‘> <!doctype html> <html> <head> <meta charset‘‘utf-8‘‘/> </head> <body&…
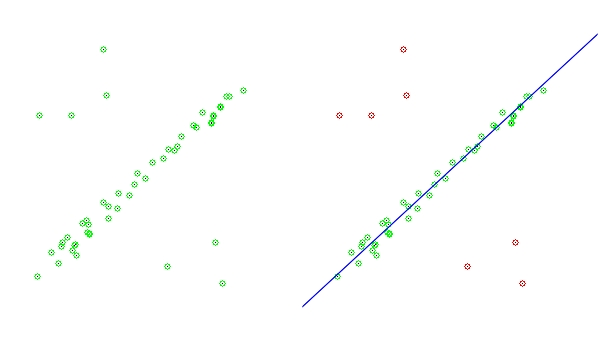
图像配准----RANSAC
对角点进行初始匹配后,所选定的角点并不能保证全部是正确的点,也可能有误点,因此,还需要进一步对所选定的角点进行精确匹配。 RANSAC(RANdom Sample And Consensus)方法是由Fischler和Bolles提出的一种鲁棒性的参数估计方法。它的…

教你用OpenCV实现机器学习最简单的k-NN算法
前言:OpenCV 的构建是为了提供计算机视觉的通用基础接口,现在已经成为经典和最优秀的计算机视觉和机器学习的综合算法工具集。作为一个开源项目,研究者、商业用户和政府部门都可以轻松利用和修改现成的代码。k-NN算法可以认为是最简单的机器学…
div 相同属性提取
把样式名或id写在一起,用逗号隔开 <!DOCTYPE html><html lang"en"><head> <meta charset"UTF-8"> <title>信息详情</title> <style type"text/css"> #box-1, #box-2, #box…