卷积神经网络(CNN)代码实现(MNIST)解析
在http://blog.csdn.net/fengbingchun/article/details/50814710中给出了CNN的简单实现,这里对每一步的实现作个说明:
共7层:依次为输入层、C1层、S2层、C3层、S4层、C5层、输出层,C代表卷积层(特征提取),S代表降采样层或池化层(Pooling),输出层为全连接层。
1. 各层权值、偏置(阈值)初始化:
各层权值、偏置个数计算如下:
(1)、输入层:预处理后的32*32图像数据,无权值和偏置;
(2)、C1层:卷积窗大小5*5,输出特征图数量6,卷积窗种类1*6=6,输出特征图大小28*28,因此可训练参数(权值+偏置):(5*5*1)*6+6=150+6;
(3)、S2层:卷积窗大小2*2,输出下采样图数量6,卷积窗种类6,输出下采样图大小14*14,因此可训练参数(权值+偏置):1*6+6=6+6;
(4)、C3层:卷积窗大小5*5,输出特征图数量16,卷积窗种类6*16=96,输出特征图大小10*10,因此可训练参数(权值+偏置):(5*5*6)*16+16=2400+16;
(5)、S4层:卷积窗大小2*2,输出下采样图数量16,卷积窗种类16,输出下采样图大小5*5,因此可训练参数(权值+偏置):1*16+16=16+16;
(6)、C5层:卷积窗大小5*5,输出特征图数量120,卷积窗种类16*120=1920,输出特征图大小1*1,因此可训练参数(权值+偏置):(5*5*16)*120+120=48000+120;
(7)、输出层:卷积窗大小1*1,输出特征图数量10,卷积窗种类120*10=1200,输出特征图大小1*1,因此可训练参数(权值+偏置):(1*120)*10+10=1200+10.
代码段如下:
#define num_map_input_CNN 1 //输入层map个数
#define num_map_C1_CNN 6 //C1层map个数
#define num_map_S2_CNN 6 //S2层map个数
#define num_map_C3_CNN 16 //C3层map个数
#define num_map_S4_CNN 16 //S4层map个数
#define num_map_C5_CNN 120 //C5层map个数
#define num_map_output_CNN 10 //输出层map个数#define len_weight_C1_CNN 150 //C1层权值数,(5*5*1)*6=150
#define len_bias_C1_CNN 6 //C1层阈值数,6
#define len_weight_S2_CNN 6 //S2层权值数,1*6=6
#define len_bias_S2_CNN 6 //S2层阈值数,6
#define len_weight_C3_CNN 2400 //C3层权值数,(5*5*6)*16=2400
#define len_bias_C3_CNN 16 //C3层阈值数,16
#define len_weight_S4_CNN 16 //S4层权值数,1*16=16
#define len_bias_S4_CNN 16 //S4层阈值数,16
#define len_weight_C5_CNN 48000 //C5层权值数,(5*5*16)*120=48000
#define len_bias_C5_CNN 120 //C5层阈值数,120
#define len_weight_output_CNN 1200 //输出层权值数,(1*120)*10=1200
#define len_bias_output_CNN 10 //输出层阈值数,10#define num_neuron_input_CNN 1024 //输入层神经元数,(32*32)*1=1024
#define num_neuron_C1_CNN 4704 //C1层神经元数,(28*28)*6=4704
#define num_neuron_S2_CNN 1176 //S2层神经元数,(14*14)*6=1176
#define num_neuron_C3_CNN 1600 //C3层神经元数,(10*10)*16=1600
#define num_neuron_S4_CNN 400 //S4层神经元数,(5*5)*16=400
#define num_neuron_C5_CNN 120 //C5层神经元数,(1*1)*120=120
#define num_neuron_output_CNN 10 //输出层神经元数,(1*1)*10=10权值、偏置初始化:
(1)、权值使用函数uniform_real_distribution均匀分布初始化,tiny-cnn中每次初始化权值数值都相同,这里作了调整,使每次初始化的权值均不同。每层权值初始化大小范围都不一样;
(2)、所有层的偏置均初始化为0.
代码段如下:
double CNN::uniform_rand(double min, double max)
{//static std::mt19937 gen(1);std::random_device rd;std::mt19937 gen(rd());std::uniform_real_distribution<double> dst(min, max);return dst(gen);
}bool CNN::uniform_rand(double* src, int len, double min, double max)
{for (int i = 0; i < len; i++) {src[i] = uniform_rand(min, max);}return true;
}bool CNN::initWeightThreshold()
{srand(time(0) + rand());const double scale = 6.0;double min_ = -std::sqrt(scale / (25.0 + 150.0));double max_ = std::sqrt(scale / (25.0 + 150.0));uniform_rand(weight_C1, len_weight_C1_CNN, min_, max_);for (int i = 0; i < len_bias_C1_CNN; i++) {bias_C1[i] = 0.0;}min_ = -std::sqrt(scale / (4.0 + 1.0));max_ = std::sqrt(scale / (4.0 + 1.0));uniform_rand(weight_S2, len_weight_S2_CNN, min_, max_);for (int i = 0; i < len_bias_S2_CNN; i++) {bias_S2[i] = 0.0;}min_ = -std::sqrt(scale / (150.0 + 400.0));max_ = std::sqrt(scale / (150.0 + 400.0));uniform_rand(weight_C3, len_weight_C3_CNN, min_, max_);for (int i = 0; i < len_bias_C3_CNN; i++) {bias_C3[i] = 0.0;}min_ = -std::sqrt(scale / (4.0 + 1.0));max_ = std::sqrt(scale / (4.0 + 1.0));uniform_rand(weight_S4, len_weight_S4_CNN, min_, max_);for (int i = 0; i < len_bias_S4_CNN; i++) {bias_S4[i] = 0.0;}min_ = -std::sqrt(scale / (400.0 + 3000.0));max_ = std::sqrt(scale / (400.0 + 3000.0));uniform_rand(weight_C5, len_weight_C5_CNN, min_, max_);for (int i = 0; i < len_bias_C5_CNN; i++) {bias_C5[i] = 0.0;}min_ = -std::sqrt(scale / (120.0 + 10.0));max_ = std::sqrt(scale / (120.0 + 10.0));uniform_rand(weight_output, len_weight_output_CNN, min_, max_);for (int i = 0; i < len_bias_output_CNN; i++) {bias_output[i] = 0.0;}return true;
}2. 加载MNIST数据:
关于MNIST的介绍可以参考:http://blog.csdn.net/fengbingchun/article/details/49611549
使用MNIST库作为训练集和测试集,训练样本集为60000个,测试样本集为10000个。
(1)、MNIST库中图像原始大小为28*28,这里缩放为32*32,数据取值范围为[-1,1],扩充值均取-1,作为输入层输入数据。
代码段如下:
static void readMnistImages(std::string filename, double* data_dst, int num_image)
{const int width_src_image = 28;const int height_src_image = 28;const int x_padding = 2;const int y_padding = 2;const double scale_min = -1;const double scale_max = 1;std::ifstream file(filename, std::ios::binary);assert(file.is_open());int magic_number = 0;int number_of_images = 0;int n_rows = 0;int n_cols = 0;file.read((char*)&magic_number, sizeof(magic_number));magic_number = reverseInt(magic_number);file.read((char*)&number_of_images, sizeof(number_of_images));number_of_images = reverseInt(number_of_images);assert(number_of_images == num_image);file.read((char*)&n_rows, sizeof(n_rows));n_rows = reverseInt(n_rows);file.read((char*)&n_cols, sizeof(n_cols));n_cols = reverseInt(n_cols);assert(n_rows == height_src_image && n_cols == width_src_image);int size_single_image = width_image_input_CNN * height_image_input_CNN;for (int i = 0; i < number_of_images; ++i) {int addr = size_single_image * i;for (int r = 0; r < n_rows; ++r) {for (int c = 0; c < n_cols; ++c) {unsigned char temp = 0;file.read((char*)&temp, sizeof(temp));data_dst[addr + width_image_input_CNN * (r + y_padding) + c + x_padding] = (temp / 255.0) * (scale_max - scale_min) + scale_min;}}}
}(2)、对于Label,输出层有10个节点,对应位置的节点值设为0.8,其它节点设为-0.8,作为输出层数据。
代码段如下:
static void readMnistLabels(std::string filename, double* data_dst, int num_image)
{const double scale_max = 0.8;std::ifstream file(filename, std::ios::binary);assert(file.is_open());int magic_number = 0;int number_of_images = 0;file.read((char*)&magic_number, sizeof(magic_number));magic_number = reverseInt(magic_number);file.read((char*)&number_of_images, sizeof(number_of_images));number_of_images = reverseInt(number_of_images);assert(number_of_images == num_image);for (int i = 0; i < number_of_images; ++i) {unsigned char temp = 0;file.read((char*)&temp, sizeof(temp));data_dst[i * num_map_output_CNN + temp] = scale_max;}
}static void readMnistLabels(std::string filename, double* data_dst, int num_image)
{const double scale_max = 0.8;std::ifstream file(filename, std::ios::binary);assert(file.is_open());int magic_number = 0;int number_of_images = 0;file.read((char*)&magic_number, sizeof(magic_number));magic_number = reverseInt(magic_number);file.read((char*)&number_of_images, sizeof(number_of_images));number_of_images = reverseInt(number_of_images);assert(number_of_images == num_image);for (int i = 0; i < number_of_images; ++i) {unsigned char temp = 0;file.read((char*)&temp, sizeof(temp));data_dst[i * num_map_output_CNN + temp] = scale_max;}
}3. 前向传播:主要计算每层的神经元值;其中C1层、C3层、C5层操作过程相同;S2层、S4层操作过程相同。
(1)、输入层:神经元数为(32*32)*1=1024。
(2)、C1层:神经元数为(28*28)*6=4704,分别用每一个5*5的卷积图像去乘以32*32的图像,获得一个28*28的图像,即对应位置相加再求和,stride长度为1;一共6个5*5的卷积图像,然后对每一个神经元加上一个阈值,最后再通过tanh激活函数对每一神经元进行运算得到最终每一个神经元的结果。
激活函数的作用:它是用来加入非线性因素的,解决线性模型所不能解决的问题,提供网络的非线性建模能力。如果没有激活函数,那么该网络仅能够表达线性映射,此时即便有再多的隐藏层,其整个网络跟单层神经网络也是等价的。因此也可以认为,只有加入了激活函数之后,深度神经网络才具备了分层的非线性映射学习能力。
代码段如下:
double CNN::activation_function_tanh(double x)
{double ep = std::exp(x);double em = std::exp(-x);return (ep - em) / (ep + em);
}bool CNN::Forward_C1()
{init_variable(neuron_C1, 0.0, num_neuron_C1_CNN);for (int o = 0; o < num_map_C1_CNN; o++) {for (int inc = 0; inc < num_map_input_CNN; inc++) {int addr1 = get_index(0, 0, num_map_input_CNN * o + inc, width_kernel_conv_CNN, height_kernel_conv_CNN, num_map_C1_CNN * num_map_input_CNN);int addr2 = get_index(0, 0, inc, width_image_input_CNN, height_image_input_CNN, num_map_input_CNN);int addr3 = get_index(0, 0, o, width_image_C1_CNN, height_image_C1_CNN, num_map_C1_CNN);const double* pw = &weight_C1[0] + addr1;const double* pi = data_single_image + addr2;double* pa = &neuron_C1[0] + addr3;for (int y = 0; y < height_image_C1_CNN; y++) {for (int x = 0; x < width_image_C1_CNN; x++) {const double* ppw = pw;const double* ppi = pi + y * width_image_input_CNN + x;double sum = 0.0;for (int wy = 0; wy < height_kernel_conv_CNN; wy++) {for (int wx = 0; wx < width_kernel_conv_CNN; wx++) {sum += *ppw++ * ppi[wy * width_image_input_CNN + wx];}}pa[y * width_image_C1_CNN + x] += sum;}}}int addr3 = get_index(0, 0, o, width_image_C1_CNN, height_image_C1_CNN, num_map_C1_CNN);double* pa = &neuron_C1[0] + addr3;double b = bias_C1[o];for (int y = 0; y < height_image_C1_CNN; y++) {for (int x = 0; x < width_image_C1_CNN; x++) {pa[y * width_image_C1_CNN + x] += b;}}}for (int i = 0; i < num_neuron_C1_CNN; i++) {neuron_C1[i] = activation_function_tanh(neuron_C1[i]);}return true;
}(3)、S2层:神经元数为(14*14)*6=1176,对C1中6个28*28的特征图生成6个14*14的下采样图,相邻四个神经元分别乘以同一个权值再进行相加求和,再求均值即除以4,然后再加上一个阈值,最后再通过tanh激活函数对每一神经元进行运算得到最终每一个神经元的结果。
代码段如下:
bool CNN::Forward_S2()
{init_variable(neuron_S2, 0.0, num_neuron_S2_CNN);double scale_factor = 1.0 / (width_kernel_pooling_CNN * height_kernel_pooling_CNN);assert(out2wi_S2.size() == num_neuron_S2_CNN);assert(out2bias_S2.size() == num_neuron_S2_CNN);for (int i = 0; i < num_neuron_S2_CNN; i++) {const wi_connections& connections = out2wi_S2[i];neuron_S2[i] = 0;for (int index = 0; index < connections.size(); index++) {neuron_S2[i] += weight_S2[connections[index].first] * neuron_C1[connections[index].second];}neuron_S2[i] *= scale_factor;neuron_S2[i] += bias_S2[out2bias_S2[i]];}for (int i = 0; i < num_neuron_S2_CNN; i++) {neuron_S2[i] = activation_function_tanh(neuron_S2[i]);}return true;
}(4)、C3层:神经元数为(10*10)*16=1600,C3层实现方式与C1层完全相同,由S2中的6个14*14下采样图生成16个10*10特征图,对于生成的每一个10*10的特征图,是由6个5*5的卷积图像去乘以6个14*14的下采样图,然后对应位置相加求和,然后对每一个神经元加上一个阈值,最后再通过tanh激活函数对每一神经元进行运算得到最终每一个神经元的结果。
也可按照Y.Lecun给出的表进行计算,即对于生成的每一个10*10的特征图,是由n个5*5的卷积图像去乘以n个14*14的下采样图,其中n是小于6的,即不完全连接。这样做的原因:第一,不完全的连接机制将连接的数量保持在合理的范围内。第二,也是最重要的,其破坏了网络的对称性。由于不同的特征图有不同的输入,所以迫使他们抽取不同的特征。
代码段如下:
// connection table [Y.Lecun, 1998 Table.1]
#define O true
#define X false
static const bool tbl[6][16] = {O, X, X, X, O, O, O, X, X, O, O, O, O, X, O, O,O, O, X, X, X, O, O, O, X, X, O, O, O, O, X, O,O, O, O, X, X, X, O, O, O, X, X, O, X, O, O, O,X, O, O, O, X, X, O, O, O, O, X, X, O, X, O, O,X, X, O, O, O, X, X, O, O, O, O, X, O, O, X, O,X, X, X, O, O, O, X, X, O, O, O, O, X, O, O, O
};
#undef O
#undef Xbool CNN::Forward_C3()
{init_variable(neuron_C3, 0.0, num_neuron_C3_CNN);for (int o = 0; o < num_map_C3_CNN; o++) {for (int inc = 0; inc < num_map_S2_CNN; inc++) {if (!tbl[inc][o]) continue;int addr1 = get_index(0, 0, num_map_S2_CNN * o + inc, width_kernel_conv_CNN, height_kernel_conv_CNN, num_map_C3_CNN * num_map_S2_CNN);int addr2 = get_index(0, 0, inc, width_image_S2_CNN, height_image_S2_CNN, num_map_S2_CNN);int addr3 = get_index(0, 0, o, width_image_C3_CNN, height_image_C3_CNN, num_map_C3_CNN);const double* pw = &weight_C3[0] + addr1;const double* pi = &neuron_S2[0] + addr2;double* pa = &neuron_C3[0] + addr3;for (int y = 0; y < height_image_C3_CNN; y++) {for (int x = 0; x < width_image_C3_CNN; x++) {const double* ppw = pw;const double* ppi = pi + y * width_image_S2_CNN + x;double sum = 0.0;for (int wy = 0; wy < height_kernel_conv_CNN; wy++) {for (int wx = 0; wx < width_kernel_conv_CNN; wx++) {sum += *ppw++ * ppi[wy * width_image_S2_CNN + wx];}}pa[y * width_image_C3_CNN + x] += sum;}}}int addr3 = get_index(0, 0, o, width_image_C3_CNN, height_image_C3_CNN, num_map_C3_CNN);double* pa = &neuron_C3[0] + addr3;double b = bias_C3[o];for (int y = 0; y < height_image_C3_CNN; y++) {for (int x = 0; x < width_image_C3_CNN; x++) {pa[y * width_image_C3_CNN + x] += b;}}}for (int i = 0; i < num_neuron_C3_CNN; i++) {neuron_C3[i] = activation_function_tanh(neuron_C3[i]);}return true;
}(5)、S4层:神经元数为(5*5)*16=400,S4层实现方式与S2层完全相同,由C3中16个10*10的特征图生成16个5*5下采样图,相邻四个神经元分别乘以同一个权值再进行相加求和,再求均值即除以4,然后再加上一个阈值,最后再通过tanh激活函数对每一神经元进行运算得到最终每一个神经元的结果。
代码段如下:
bool CNN::Forward_S4()
{double scale_factor = 1.0 / (width_kernel_pooling_CNN * height_kernel_pooling_CNN);init_variable(neuron_S4, 0.0, num_neuron_S4_CNN);assert(out2wi_S4.size() == num_neuron_S4_CNN);assert(out2bias_S4.size() == num_neuron_S4_CNN);for (int i = 0; i < num_neuron_S4_CNN; i++) {const wi_connections& connections = out2wi_S4[i];neuron_S4[i] = 0.0;for (int index = 0; index < connections.size(); index++) {neuron_S4[i] += weight_S4[connections[index].first] * neuron_C3[connections[index].second];}neuron_S4[i] *= scale_factor;neuron_S4[i] += bias_S4[out2bias_S4[i]];}for (int i = 0; i < num_neuron_S4_CNN; i++) {neuron_S4[i] = activation_function_tanh(neuron_S4[i]);}return true;
}(6)、C5层:神经元数为(1*1)*120=120,也可看为全连接层,C5层实现方式与C1、C3层完全相同,由S4中16个5*5下采样图生成120个1*1特征图,对于生成的每一个1*1的特征图,是由16个5*5的卷积图像去乘以16个5*5的下采用图,然后相加求和,然后对每一个神经元加上一个阈值,最后再通过tanh激活函数对每一神经元进行运算得到最终每一个神经元的结果。
代码段如下:
bool CNN::Forward_C5()
{init_variable(neuron_C5, 0.0, num_neuron_C5_CNN);for (int o = 0; o < num_map_C5_CNN; o++) {for (int inc = 0; inc < num_map_S4_CNN; inc++) {int addr1 = get_index(0, 0, num_map_S4_CNN * o + inc, width_kernel_conv_CNN, height_kernel_conv_CNN, num_map_C5_CNN * num_map_S4_CNN);int addr2 = get_index(0, 0, inc, width_image_S4_CNN, height_image_S4_CNN, num_map_S4_CNN);int addr3 = get_index(0, 0, o, width_image_C5_CNN, height_image_C5_CNN, num_map_C5_CNN);const double *pw = &weight_C5[0] + addr1;const double *pi = &neuron_S4[0] + addr2;double *pa = &neuron_C5[0] + addr3;for (int y = 0; y < height_image_C5_CNN; y++) {for (int x = 0; x < width_image_C5_CNN; x++) {const double *ppw = pw;const double *ppi = pi + y * width_image_S4_CNN + x;double sum = 0.0;for (int wy = 0; wy < height_kernel_conv_CNN; wy++) {for (int wx = 0; wx < width_kernel_conv_CNN; wx++) {sum += *ppw++ * ppi[wy * width_image_S4_CNN + wx];}}pa[y * width_image_C5_CNN + x] += sum;}}}int addr3 = get_index(0, 0, o, width_image_C5_CNN, height_image_C5_CNN, num_map_C5_CNN);double *pa = &neuron_C5[0] + addr3;double b = bias_C5[o];for (int y = 0; y < height_image_C5_CNN; y++) {for (int x = 0; x < width_image_C5_CNN; x++) {pa[y * width_image_C5_CNN + x] += b;}}}for (int i = 0; i < num_neuron_C5_CNN; i++) {neuron_C5[i] = activation_function_tanh(neuron_C5[i]);}return true;
}(7)、输出层:神经元数为(1*1)*10=10,为全连接层,输出层中的每一个神经元均是由C5层中的120个神经元乘以相对应的权值,然后相加求和;然后对每一个神经元加上一个阈值,最后再通过tanh激活函数对每一神经元进行运算得到最终每一个神经元的结果。
代码段如下:
bool CNN::Forward_output()
{init_variable(neuron_output, 0.0, num_neuron_output_CNN);for (int i = 0; i < num_neuron_output_CNN; i++) {neuron_output[i] = 0.0;for (int c = 0; c < num_neuron_C5_CNN; c++) {neuron_output[i] += weight_output[c * num_neuron_output_CNN + i] * neuron_C5[c];}neuron_output[i] += bias_output[i];}for (int i = 0; i < num_neuron_output_CNN; i++) {neuron_output[i] = activation_function_tanh(neuron_output[i]);}return true;
}4. 反向传播:主要计算每层权值和偏置的误差以及每层神经元的误差;其中输入层、S2层、S4层操作过程相同;C1层、C3层操作过程相同。
(1)、输出层:计算输出层神经元误差;通过mse损失函数的导数函数和tanh激活函数的导数函数来计算输出层神经元误差,即a、已计算出的输出层神经元值减去对应label值,b、1.0减去输出层神经元值的平方,c、a与c的乘积和。
损失函数作用:在统计学中损失函数是一种衡量损失和错误(这种损失与”错误地”估计有关)程度的函数。损失函数在实践中最重要的运用,在于协助我们通过过程的改善而持续减少目标值的变异,并非仅仅追求符合逻辑。在深度学习中,对于损失函数的收敛特性,我们期望是当误差越大的时候,收敛(学习)速度应该越快。成为损失函数需要满足两点要求:非负性;预测值和期望值接近时,函数值趋于0.
代码段如下:
double CNN::loss_function_mse_derivative(double y, double t)
{return (y - t);
}void CNN::loss_function_gradient(const double* y, const double* t, double* dst, int len)
{for (int i = 0; i < len; i++) {dst[i] = loss_function_mse_derivative(y[i], t[i]);}
}double CNN::activation_function_tanh_derivative(double x)
{return (1.0 - x * x);
}double CNN::dot_product(const double* s1, const double* s2, int len)
{double result = 0.0;for (int i = 0; i < len; i++) {result += s1[i] * s2[i];}return result;
}bool CNN::Backward_output()
{init_variable(delta_neuron_output, 0.0, num_neuron_output_CNN);double dE_dy[num_neuron_output_CNN];init_variable(dE_dy, 0.0, num_neuron_output_CNN);loss_function_gradient(neuron_output, data_single_label, dE_dy, num_neuron_output_CNN); // 损失函数: mean squared error(均方差)// delta = dE/da = (dE/dy) * (dy/da)for (int i = 0; i < num_neuron_output_CNN; i++) {double dy_da[num_neuron_output_CNN];init_variable(dy_da, 0.0, num_neuron_output_CNN);dy_da[i] = activation_function_tanh_derivative(neuron_output[i]);delta_neuron_output[i] = dot_product(dE_dy, dy_da, num_neuron_output_CNN);}return true;
}(2)、C5层:计算C5层神经元误差、输出层权值误差、输出层偏置误差;通过输出层神经元误差乘以输出层权值,求和,结果再乘以C5层神经元的tanh激活函数的导数(即1-C5层神经元值的平方),获得C5层每一个神经元误差;通过输出层神经元误差乘以C5层神经元获得输出层权值误差;输出层偏置误差即为输出层神经元误差。
代码段如下:
bool CNN::muladd(const double* src, double c, int len, double* dst)
{for (int i = 0; i < len; i++) {dst[i] += (src[i] * c);}return true;
}bool CNN::Backward_C5()
{init_variable(delta_neuron_C5, 0.0, num_neuron_C5_CNN);init_variable(delta_weight_output, 0.0, len_weight_output_CNN);init_variable(delta_bias_output, 0.0, len_bias_output_CNN);for (int c = 0; c < num_neuron_C5_CNN; c++) {// propagate delta to previous layer// prev_delta[c] += current_delta[r] * W_[c * out_size_ + r]delta_neuron_C5[c] = dot_product(&delta_neuron_output[0], &weight_output[c * num_neuron_output_CNN], num_neuron_output_CNN);delta_neuron_C5[c] *= activation_function_tanh_derivative(neuron_C5[c]);}// accumulate weight-step using delta// dW[c * out_size + i] += current_delta[i] * prev_out[c]for (int c = 0; c < num_neuron_C5_CNN; c++) {muladd(&delta_neuron_output[0], neuron_C5[c], num_neuron_output_CNN, &delta_weight_output[0] + c * num_neuron_output_CNN);}for (int i = 0; i < len_bias_output_CNN; i++) {delta_bias_output[i] += delta_neuron_output[i];}return true;
}(3)、S4层:计算S4层神经元误差、C5层权值误差、C5层偏置误差;通过C5层权值乘以C5层神经元误差,求和,结果再乘以S4层神经元的tanh激活函数的导数(即1-S4神经元的平方),获得S4层每一个神经元误差;通过S4层神经元乘以C5层神经元误差,求和,获得C5层权值误差;C5层偏置误差即为C5层神经元误差。
代码段如下:
bool CNN::Backward_S4()
{init_variable(delta_neuron_S4, 0.0, num_neuron_S4_CNN);init_variable(delta_weight_C5, 0.0, len_weight_C5_CNN);init_variable(delta_bias_C5, 0.0, len_bias_C5_CNN);// propagate delta to previous layerfor (int inc = 0; inc < num_map_S4_CNN; inc++) {for (int outc = 0; outc < num_map_C5_CNN; outc++) {int addr1 = get_index(0, 0, num_map_S4_CNN * outc + inc, width_kernel_conv_CNN, height_kernel_conv_CNN, num_map_S4_CNN * num_map_C5_CNN);int addr2 = get_index(0, 0, outc, width_image_C5_CNN, height_image_C5_CNN, num_map_C5_CNN);int addr3 = get_index(0, 0, inc, width_image_S4_CNN, height_image_S4_CNN, num_map_S4_CNN);const double* pw = &weight_C5[0] + addr1;const double* pdelta_src = &delta_neuron_C5[0] + addr2;double* pdelta_dst = &delta_neuron_S4[0] + addr3;for (int y = 0; y < height_image_C5_CNN; y++) {for (int x = 0; x < width_image_C5_CNN; x++) {const double* ppw = pw;const double ppdelta_src = pdelta_src[y * width_image_C5_CNN + x];double* ppdelta_dst = pdelta_dst + y * width_image_S4_CNN + x;for (int wy = 0; wy < height_kernel_conv_CNN; wy++) {for (int wx = 0; wx < width_kernel_conv_CNN; wx++) {ppdelta_dst[wy * width_image_S4_CNN + wx] += *ppw++ * ppdelta_src;}}}}}}for (int i = 0; i < num_neuron_S4_CNN; i++) {delta_neuron_S4[i] *= activation_function_tanh_derivative(neuron_S4[i]);}// accumulate dwfor (int inc = 0; inc < num_map_S4_CNN; inc++) {for (int outc = 0; outc < num_map_C5_CNN; outc++) {for (int wy = 0; wy < height_kernel_conv_CNN; wy++) {for (int wx = 0; wx < width_kernel_conv_CNN; wx++) {int addr1 = get_index(wx, wy, inc, width_image_S4_CNN, height_image_S4_CNN, num_map_S4_CNN);int addr2 = get_index(0, 0, outc, width_image_C5_CNN, height_image_C5_CNN, num_map_C5_CNN);int addr3 = get_index(wx, wy, num_map_S4_CNN * outc + inc, width_kernel_conv_CNN, height_kernel_conv_CNN, num_map_S4_CNN * num_map_C5_CNN);double dst = 0.0;const double* prevo = &neuron_S4[0] + addr1;const double* delta = &delta_neuron_C5[0] + addr2;for (int y = 0; y < height_image_C5_CNN; y++) {dst += dot_product(prevo + y * width_image_S4_CNN, delta + y * width_image_C5_CNN, width_image_C5_CNN);}delta_weight_C5[addr3] += dst;}}}}// accumulate dbfor (int outc = 0; outc < num_map_C5_CNN; outc++) {int addr2 = get_index(0, 0, outc, width_image_C5_CNN, height_image_C5_CNN, num_map_C5_CNN);const double* delta = &delta_neuron_C5[0] + addr2;for (int y = 0; y < height_image_C5_CNN; y++) {for (int x = 0; x < width_image_C5_CNN; x++) {delta_bias_C5[outc] += delta[y * width_image_C5_CNN + x];}}}return true;
}(4)、C3层:计算C3层神经元误差、S4层权值误差、S4层偏置误差;通过S4层权值乘以S4层神经元误差,求和,结果再乘以C3层神经元的tanh激活函数的导数(即1-S4神经元的平方),然后再乘以1/4,获得C3层每一个神经元误差;通过C3层神经元乘以S4神经元误差,求和,再乘以1/4,获得S4层权值误差;通过S4层神经元误差求和,来获得S4层偏置误差。
代码段如下:
bool CNN::Backward_C3()
{init_variable(delta_neuron_C3, 0.0, num_neuron_C3_CNN);init_variable(delta_weight_S4, 0.0, len_weight_S4_CNN);init_variable(delta_bias_S4, 0.0, len_bias_S4_CNN);double scale_factor = 1.0 / (width_kernel_pooling_CNN * height_kernel_pooling_CNN);assert(in2wo_C3.size() == num_neuron_C3_CNN);assert(weight2io_C3.size() == len_weight_S4_CNN);assert(bias2out_C3.size() == len_bias_S4_CNN);for (int i = 0; i < num_neuron_C3_CNN; i++) {const wo_connections& connections = in2wo_C3[i];double delta = 0.0;for (int j = 0; j < connections.size(); j++) {delta += weight_S4[connections[j].first] * delta_neuron_S4[connections[j].second];}delta_neuron_C3[i] = delta * scale_factor * activation_function_tanh_derivative(neuron_C3[i]);}for (int i = 0; i < len_weight_S4_CNN; i++) {const io_connections& connections = weight2io_C3[i];double diff = 0;for (int j = 0; j < connections.size(); j++) {diff += neuron_C3[connections[j].first] * delta_neuron_S4[connections[j].second];}delta_weight_S4[i] += diff * scale_factor;}for (int i = 0; i < len_bias_S4_CNN; i++) {const std::vector<int>& outs = bias2out_C3[i];double diff = 0;for (int o = 0; o < outs.size(); o++) {diff += delta_neuron_S4[outs[o]];}delta_bias_S4[i] += diff;}return true;
}(5)、S2层:计算S2层神经元误差、C3层权值误差、C3层偏置误差;通过C3层权值乘以C3层神经元误差,求和,结果再乘以S2层神经元的tanh激活函数的导数(即1-S2神经元的平方),获得S2层每一个神经元误差;通过S2层神经元乘以C3层神经元误差,求和,获得C3层权值误差;C3层偏置误差即为C3层神经元误差和。
代码段如下:
bool CNN::Backward_S2()
{init_variable(delta_neuron_S2, 0.0, num_neuron_S2_CNN);init_variable(delta_weight_C3, 0.0, len_weight_C3_CNN);init_variable(delta_bias_C3, 0.0, len_bias_C3_CNN);// propagate delta to previous layerfor (int inc = 0; inc < num_map_S2_CNN; inc++) {for (int outc = 0; outc < num_map_C3_CNN; outc++) {if (!tbl[inc][outc]) continue;int addr1 = get_index(0, 0, num_map_S2_CNN * outc + inc, width_kernel_conv_CNN, height_kernel_conv_CNN, num_map_S2_CNN * num_map_C3_CNN);int addr2 = get_index(0, 0, outc, width_image_C3_CNN, height_image_C3_CNN, num_map_C3_CNN);int addr3 = get_index(0, 0, inc, width_image_S2_CNN, height_image_S2_CNN, num_map_S2_CNN);const double *pw = &weight_C3[0] + addr1;const double *pdelta_src = &delta_neuron_C3[0] + addr2;;double* pdelta_dst = &delta_neuron_S2[0] + addr3;for (int y = 0; y < height_image_C3_CNN; y++) {for (int x = 0; x < width_image_C3_CNN; x++) {const double* ppw = pw;const double ppdelta_src = pdelta_src[y * width_image_C3_CNN + x];double* ppdelta_dst = pdelta_dst + y * width_image_S2_CNN + x;for (int wy = 0; wy < height_kernel_conv_CNN; wy++) {for (int wx = 0; wx < width_kernel_conv_CNN; wx++) {ppdelta_dst[wy * width_image_S2_CNN + wx] += *ppw++ * ppdelta_src;}}}}}}for (int i = 0; i < num_neuron_S2_CNN; i++) {delta_neuron_S2[i] *= activation_function_tanh_derivative(neuron_S2[i]);}// accumulate dwfor (int inc = 0; inc < num_map_S2_CNN; inc++) {for (int outc = 0; outc < num_map_C3_CNN; outc++) {if (!tbl[inc][outc]) continue;for (int wy = 0; wy < height_kernel_conv_CNN; wy++) {for (int wx = 0; wx < width_kernel_conv_CNN; wx++) {int addr1 = get_index(wx, wy, inc, width_image_S2_CNN, height_image_S2_CNN, num_map_S2_CNN);int addr2 = get_index(0, 0, outc, width_image_C3_CNN, height_image_C3_CNN, num_map_C3_CNN);int addr3 = get_index(wx, wy, num_map_S2_CNN * outc + inc, width_kernel_conv_CNN, height_kernel_conv_CNN, num_map_S2_CNN * num_map_C3_CNN);double dst = 0.0;const double* prevo = &neuron_S2[0] + addr1;const double* delta = &delta_neuron_C3[0] + addr2;for (int y = 0; y < height_image_C3_CNN; y++) {dst += dot_product(prevo + y * width_image_S2_CNN, delta + y * width_image_C3_CNN, width_image_C3_CNN);}delta_weight_C3[addr3] += dst;}}}}// accumulate dbfor (int outc = 0; outc < len_bias_C3_CNN; outc++) {int addr1 = get_index(0, 0, outc, width_image_C3_CNN, height_image_C3_CNN, num_map_C3_CNN);const double* delta = &delta_neuron_C3[0] + addr1;for (int y = 0; y < height_image_C3_CNN; y++) {for (int x = 0; x < width_image_C3_CNN; x++) {delta_bias_C3[outc] += delta[y * width_image_C3_CNN + x];}}}return true;
}(6)、C1层:计算C1层神经元误差、S2层权值误差、S2层偏置误差;通过S2层权值乘以S2层神经元误差,求和,结果再乘以C1层神经元的tanh激活函数的导数(即1-C1神经元的平方),然后再乘以1/4,获得C1层每一个神经元误差;通过C1层神经元乘以S2神经元误差,求和,再乘以1/4,获得S2层权值误差;通过S2层神经元误差求和,来获得S4层偏置误差。
代码段如下:
bool CNN::Backward_C1()
{init_variable(delta_neuron_C1, 0.0, num_neuron_C1_CNN);init_variable(delta_weight_S2, 0.0, len_weight_S2_CNN);init_variable(delta_bias_S2, 0.0, len_bias_S2_CNN);double scale_factor = 1.0 / (width_kernel_pooling_CNN * height_kernel_pooling_CNN);assert(in2wo_C1.size() == num_neuron_C1_CNN);assert(weight2io_C1.size() == len_weight_S2_CNN);assert(bias2out_C1.size() == len_bias_S2_CNN);for (int i = 0; i < num_neuron_C1_CNN; i++) {const wo_connections& connections = in2wo_C1[i];double delta = 0.0;for (int j = 0; j < connections.size(); j++) {delta += weight_S2[connections[j].first] * delta_neuron_S2[connections[j].second];}delta_neuron_C1[i] = delta * scale_factor * activation_function_tanh_derivative(neuron_C1[i]);}for (int i = 0; i < len_weight_S2_CNN; i++) {const io_connections& connections = weight2io_C1[i];double diff = 0.0;for (int j = 0; j < connections.size(); j++) {diff += neuron_C1[connections[j].first] * delta_neuron_S2[connections[j].second];}delta_weight_S2[i] += diff * scale_factor;}for (int i = 0; i < len_bias_S2_CNN; i++) {const std::vector<int>& outs = bias2out_C1[i];double diff = 0;for (int o = 0; o < outs.size(); o++) {diff += delta_neuron_S2[outs[o]];}delta_bias_S2[i] += diff;}return true;
}(7)、输入层:计算输入层神经元误差、C1层权值误差、C1层偏置误差;通过C1层权值乘以C1层神经元误差,求和,结果再乘以输入层神经元的tanh激活函数的导数(即1-输入层神经元的平方),获得输入层每一个神经元误差;通过输入层层神经元乘以C1层神经元误差,求和,获得C1层权值误差;C1层偏置误差即为C1层神经元误差和。
bool CNN::Backward_input()
{init_variable(delta_neuron_input, 0.0, num_neuron_input_CNN);init_variable(delta_weight_C1, 0.0, len_weight_C1_CNN);init_variable(delta_bias_C1, 0.0, len_bias_C1_CNN);// propagate delta to previous layerfor (int inc = 0; inc < num_map_input_CNN; inc++) {for (int outc = 0; outc < num_map_C1_CNN; outc++) {int addr1 = get_index(0, 0, num_map_input_CNN * outc + inc, width_kernel_conv_CNN, height_kernel_conv_CNN, num_map_C1_CNN);int addr2 = get_index(0, 0, outc, width_image_C1_CNN, height_image_C1_CNN, num_map_C1_CNN);int addr3 = get_index(0, 0, inc, width_image_input_CNN, height_image_input_CNN, num_map_input_CNN);const double* pw = &weight_C1[0] + addr1;const double* pdelta_src = &delta_neuron_C1[0] + addr2;double* pdelta_dst = &delta_neuron_input[0] + addr3;for (int y = 0; y < height_image_C1_CNN; y++) {for (int x = 0; x < width_image_C1_CNN; x++) {const double* ppw = pw;const double ppdelta_src = pdelta_src[y * width_image_C1_CNN + x];double* ppdelta_dst = pdelta_dst + y * width_image_input_CNN + x;for (int wy = 0; wy < height_kernel_conv_CNN; wy++) {for (int wx = 0; wx < width_kernel_conv_CNN; wx++) {ppdelta_dst[wy * width_image_input_CNN + wx] += *ppw++ * ppdelta_src;}}}}}}for (int i = 0; i < num_neuron_input_CNN; i++) {delta_neuron_input[i] *= activation_function_identity_derivative(data_single_image[i]/*neuron_input[i]*/);}// accumulate dwfor (int inc = 0; inc < num_map_input_CNN; inc++) {for (int outc = 0; outc < num_map_C1_CNN; outc++) {for (int wy = 0; wy < height_kernel_conv_CNN; wy++) {for (int wx = 0; wx < width_kernel_conv_CNN; wx++) {int addr1 = get_index(wx, wy, inc, width_image_input_CNN, height_image_input_CNN, num_map_input_CNN);int addr2 = get_index(0, 0, outc, width_image_C1_CNN, height_image_C1_CNN, num_map_C1_CNN);int addr3 = get_index(wx, wy, num_map_input_CNN * outc + inc, width_kernel_conv_CNN, height_kernel_conv_CNN, num_map_C1_CNN);double dst = 0.0;const double* prevo = data_single_image + addr1;//&neuron_input[0]const double* delta = &delta_neuron_C1[0] + addr2;for (int y = 0; y < height_image_C1_CNN; y++) {dst += dot_product(prevo + y * width_image_input_CNN, delta + y * width_image_C1_CNN, width_image_C1_CNN);}delta_weight_C1[addr3] += dst;}}}}// accumulate dbfor (int outc = 0; outc < len_bias_C1_CNN; outc++) {int addr1 = get_index(0, 0, outc, width_image_C1_CNN, height_image_C1_CNN, num_map_C1_CNN);const double* delta = &delta_neuron_C1[0] + addr1;for (int y = 0; y < height_image_C1_CNN; y++) {for (int x = 0; x < width_image_C1_CNN; x++) {delta_bias_C1[outc] += delta[y * width_image_C1_CNN + x];}}}return true;
}5. 更新各层权值、偏置:通过之前计算的各层权值、各层权值误差;各层偏置、各层偏置误差以及学习率来更新各层权值和偏置。
代码段如下:
void CNN::update_weights_bias(const double* delta, double* e_weight, double* weight, int len)
{for (int i = 0; i < len; i++) {e_weight[i] += delta[i] * delta[i];weight[i] -= learning_rate_CNN * delta[i] / (std::sqrt(e_weight[i]) + eps_CNN);}
}bool CNN::UpdateWeights()
{update_weights_bias(delta_weight_C1, E_weight_C1, weight_C1, len_weight_C1_CNN);update_weights_bias(delta_bias_C1, E_bias_C1, bias_C1, len_bias_C1_CNN);update_weights_bias(delta_weight_S2, E_weight_S2, weight_S2, len_weight_S2_CNN);update_weights_bias(delta_bias_S2, E_bias_S2, bias_S2, len_bias_S2_CNN);update_weights_bias(delta_weight_C3, E_weight_C3, weight_C3, len_weight_C3_CNN);update_weights_bias(delta_bias_C3, E_bias_C3, bias_C3, len_bias_C3_CNN);update_weights_bias(delta_weight_S4, E_weight_S4, weight_S4, len_weight_S4_CNN);update_weights_bias(delta_bias_S4, E_bias_S4, bias_S4, len_bias_S4_CNN);update_weights_bias(delta_weight_C5, E_weight_C5, weight_C5, len_weight_C5_CNN);update_weights_bias(delta_bias_C5, E_bias_C5, bias_C5, len_bias_C5_CNN);update_weights_bias(delta_weight_output, E_weight_output, weight_output, len_weight_output_CNN);update_weights_bias(delta_bias_output, E_bias_output, bias_output, len_bias_output_CNN);return true;
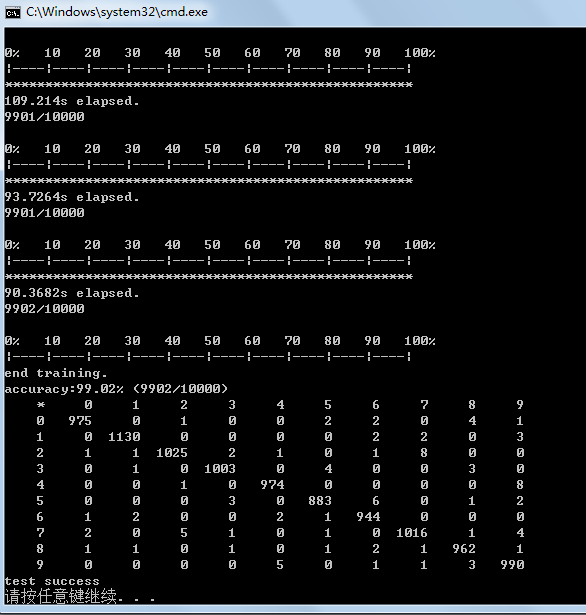
}6. 测试准确率是否达到要求或已达到循环次数:依次循环3至5中操作,根据训练集数量,每循环60000次时,通过计算的权值和偏置,来对10000个测试集进行测试,如果准确率达到0.985或者达到迭代次数上限100次时,保存权值和偏置。
代码段如下:
bool CNN::train()
{out2wi_S2.clear();out2bias_S2.clear();out2wi_S4.clear();out2bias_S4.clear();in2wo_C3.clear();weight2io_C3.clear();bias2out_C3.clear();in2wo_C1.clear();weight2io_C1.clear();bias2out_C1.clear();calc_out2wi(width_image_C1_CNN, height_image_C1_CNN, width_image_S2_CNN, height_image_S2_CNN, num_map_S2_CNN, out2wi_S2);calc_out2bias(width_image_S2_CNN, height_image_S2_CNN, num_map_S2_CNN, out2bias_S2);calc_out2wi(width_image_C3_CNN, height_image_C3_CNN, width_image_S4_CNN, height_image_S4_CNN, num_map_S4_CNN, out2wi_S4);calc_out2bias(width_image_S4_CNN, height_image_S4_CNN, num_map_S4_CNN, out2bias_S4);calc_in2wo(width_image_C3_CNN, height_image_C3_CNN, width_image_S4_CNN, height_image_S4_CNN, num_map_C3_CNN, num_map_S4_CNN, in2wo_C3);calc_weight2io(width_image_C3_CNN, height_image_C3_CNN, width_image_S4_CNN, height_image_S4_CNN, num_map_C3_CNN, num_map_S4_CNN, weight2io_C3);calc_bias2out(width_image_C3_CNN, height_image_C3_CNN, width_image_S4_CNN, height_image_S4_CNN, num_map_C3_CNN, num_map_S4_CNN, bias2out_C3);calc_in2wo(width_image_C1_CNN, height_image_C1_CNN, width_image_S2_CNN, height_image_S2_CNN, num_map_C1_CNN, num_map_C3_CNN, in2wo_C1);calc_weight2io(width_image_C1_CNN, height_image_C1_CNN, width_image_S2_CNN, height_image_S2_CNN, num_map_C1_CNN, num_map_C3_CNN, weight2io_C1);calc_bias2out(width_image_C1_CNN, height_image_C1_CNN, width_image_S2_CNN, height_image_S2_CNN, num_map_C1_CNN, num_map_C3_CNN, bias2out_C1);int iter = 0;for (iter = 0; iter < num_epochs_CNN; iter++) {std::cout << "epoch: " << iter + 1;for (int i = 0; i < num_patterns_train_CNN; i++) {data_single_image = data_input_train + i * num_neuron_input_CNN;data_single_label = data_output_train + i * num_neuron_output_CNN;Forward_C1();Forward_S2();Forward_C3();Forward_S4();Forward_C5();Forward_output();Backward_output();Backward_C5();Backward_S4();Backward_C3();Backward_S2();Backward_C1();Backward_input();UpdateWeights();}double accuracyRate = test();std::cout << ", accuray rate: " << accuracyRate << std::endl;if (accuracyRate > accuracy_rate_CNN) {saveModelFile("E:/GitCode/NN_Test/data/cnn.model");std::cout << "generate cnn model" << std::endl;break;}}if (iter == num_epochs_CNN) {saveModelFile("E:/GitCode/NN_Test/data/cnn.model");std::cout << "generate cnn model" << std::endl;}return true;
}double CNN::test()
{int count_accuracy = 0;for (int num = 0; num < num_patterns_test_CNN; num++) {data_single_image = data_input_test + num * num_neuron_input_CNN;data_single_label = data_output_test + num * num_neuron_output_CNN;Forward_C1();Forward_S2();Forward_C3();Forward_S4();Forward_C5();Forward_output();int pos_t = -1;int pos_y = -2;double max_value_t = -9999.0;double max_value_y = -9999.0;for (int i = 0; i < num_neuron_output_CNN; i++) {if (neuron_output[i] > max_value_y) {max_value_y = neuron_output[i];pos_y = i;}if (data_single_label[i] > max_value_t) {max_value_t = data_single_label[i];pos_t = i;}}if (pos_y == pos_t) {++count_accuracy;}Sleep(1);}return (count_accuracy * 1.0 / num_patterns_test_CNN);
}7. 对输入的图像数据进行识别:载入已保存的权值和偏置,对输入的数据进行识别,过程相当于前向传播。
代码段如下:
int CNN::predict(const unsigned char* data, int width, int height)
{assert(data && width == width_image_input_CNN && height == height_image_input_CNN);const double scale_min = -1;const double scale_max = 1;double tmp[width_image_input_CNN * height_image_input_CNN];for (int y = 0; y < height; y++) {for (int x = 0; x < width; x++) {tmp[y * width + x] = (data[y * width + x] / 255.0) * (scale_max - scale_min) + scale_min;}}data_single_image = &tmp[0];Forward_C1();Forward_S2();Forward_C3();Forward_S4();Forward_C5();Forward_output();int pos = -1;double max_value = -9999.0;for (int i = 0; i < num_neuron_output_CNN; i++) {if (neuron_output[i] > max_value) {max_value = neuron_output[i];pos = i;}}return pos;
}GitHub: https://github.com/fengbingchun/NN_Test
相关文章:

一点感悟和自勉
来学习linux,其实目的很简单,也很现实,就是为了学成之后找一份好的工作,能够养家糊口。 接触了几天,感觉挺难的,可能是因为我没有基础的原因吧,以前电脑只是用来打游戏和看电影,第一…

入门数据分析师,从了解元数据中心开始
作者丨凯凯连编辑丨Zandy来源 | 大数据与人工智能(ID:ai-big-data)【导读】上一篇文章,我们简单讲解了数据仓库的概念,并介绍了它的分层架构设计,相信大家对数据仓库体系已经有一定的了解了。那么ÿ…
PhpMyAdmin的简单安装和一个mysql到Redis迁移的简单例子
1.phpmyadmin的安装 sudo apt-get install phpmyadmin 之后发现http://localhost/phpmyadmin显示没有此url,于是想到本机上能显示的网页都在/var/www文件夹内,因此执行命令行:sudo ln /usr/share/phpmyadmin /var/www 这样就能使用了; 之…

聊聊flink的HistoryServer
为什么80%的码农都做不了架构师?>>> 序 本文主要研究一下flink的HistoryServer HistoryServer flink-1.7.2/flink-runtime-web/src/main/java/org/apache/flink/runtime/webmonitor/history/HistoryServer.java public class HistoryServer {private st…
深度学习开源库tiny-dnn的使用(MNIST)
tiny-dnn是一个基于DNN的深度学习开源库,它的License是BSD 3-Clause。之前名字是tiny-cnn是基于CNN的,tiny-dnn与tiny-cnn相关又增加了些新层。此开源库很活跃,几乎每天都有新的提交,因此下面详细介绍下tiny-dnn在windows7 64bit …
如何学习SVM?怎么改进实现SVM算法程序?答案来了
编辑 | 忆臻来源 | 深度学习这件小事(ID:DL_NLP)【导读】在 3D 动作识别领域,需要用到 SVM(支持向量机算法),但是现在所知道的 SVM 算法很多很乱,相关的程序包也很多,有什…
跟着石头哥哥学cocos2d-x(三)---2dx引擎中的内存管理模型
2019独角兽企业重金招聘Python工程师标准>>> 2dx引擎中的对象内存管理模型,很简单就是一个对象池引用计数,本着学好2dx的好奇心,先这里开走吧,紧接上面两节,首先我们看一个编码场景代码: hello…

读8篇论文,梳理BERT相关模型进展与反思
作者 | 陈永强来源 | 微软研究院AI头条(ID:MSRAsia)【导读】BERT 自从在 arXiv 上发表以来获得了很大的成功和关注,打开了 NLP 中 2-Stage 的潘多拉魔盒。随后涌现了一大批类似于“BERT”的预训练(pre-trained)模型,有…
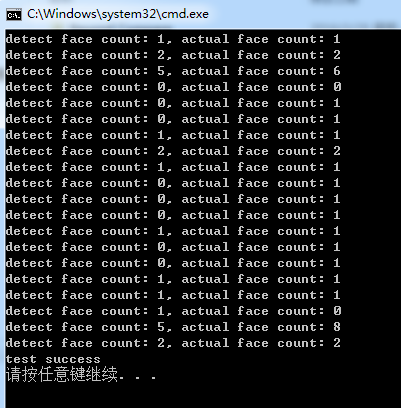
Dlib库中实现正脸人脸检测的测试代码
Dlib库中提供了正脸人脸检测的接口,这里参考dlib/examples/face_detection_ex.cpp中的代码,通过调用Dlib中的接口,实现正脸人脸检测的测试代码,测试代码如下:#include "funset.hpp" #include <string>…
20189317 《网络攻防技术》 第二周作业
一.黑客信息 (1)国外黑客 1971年,卡普尔从耶鲁大学毕业。在校期间,他专修心理学、语言学以及计算机学科。也就是在这时他开始对计算机萌生兴趣。他继续到研究生院深造。20世纪60年代,退学是许多人的一个选择。只靠知识…
centos 6.4 SVN服务器多个项目的权限分组管理
根据本博客中的cent OS 6.4下的SVN服务器构建 一文,搭建好SVN服务器只能管理一个工程,如何做到不同的项目,多个成员的权限管理分配呢?一 需求开发服务器搭建好SVN服务器,不可能只管理一个工程项目,如何做到…

cifar数据集介绍及到图像转换的实现
CIFAR是一个用于普通物体识别的数据集。CIFAR数据集分为两种:CIFAR-10和CIFAR-100。The CIFAR-10 and CIFAR-100 are labeled subsets of the 80 million tiny images dataset. They were collected by Alex Krizhevsky, Vinod Nair, and Geoffrey Hinton.CIFAR-10由…
取代Python?Rust凭什么
作者 | Nathan J. Goldbaum译者 | 弯月,责编 | 屠敏来源 | CSDN(ID:CSDNnews)【导语】Rust 也能实现神经网络?在前一篇帖子中,作者介绍了MNIST数据集以及分辨手写数字的问题。在这篇文章中,他将…

【Mac】解决「无法将 chromedriver 移动到 /usr/bin 目录下」问题
问题描述 在搭建 Selenium 库 ChromeDriver 爬虫环境时,遇到了无法将 chromedriver 移动到 /usr/bin 目录下的问题,如下图: 一查原来是因为系统有一个 System Integrity Protection (SIP) 系统完整性保护,如果此功能不关闭&#…
【译文】怎样让一天有36个小时
作者:Jon Bischke原文地址:How to Have a 36 Hour Day 你经常听人说“真希望一天能多几个小时”或者类似的话吗?当然,现实中我们每天只有24小时。这么说吧,人和人怎样度过这24个小时是完全不同的。到现在这样的说法已经…
Dlib库中实现正脸人脸关键点(landmark)检测的测试代码
Dlib库中提供了正脸人脸关键点检测的接口,这里参考dlib/examples/face_landmark_detection_ex.cpp中的代码,通过调用Dlib中的接口,实现正脸人脸关键点检测的测试代码,测试代码如下:/* reference: dlib/examples/face_l…
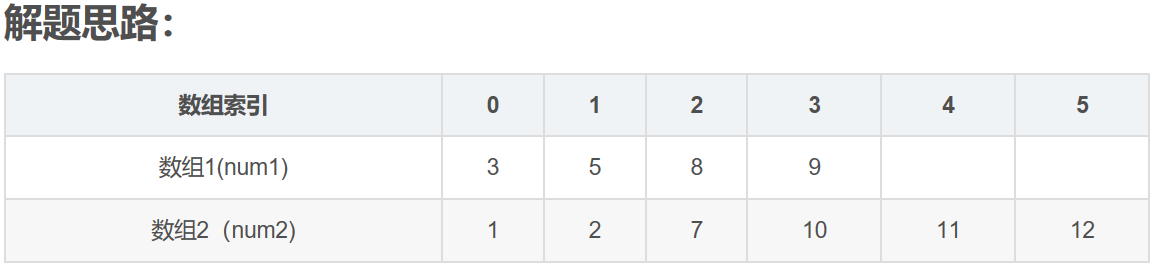
LeetCode--004--寻找两个有序数组的中位数(java)
转自https://blog.csdn.net/chen_xinjia/article/details/69258706 其中,N14,N26,size4610. 1,现在有的是两个已经排好序的数组,结果是要找出这两个数组中间的数值,如果两个数组的元素个数为偶数,则输出的是中间两个元…

开源sk-dist,超参数调优仅需3.4秒,sk-learn训练速度提升100倍
作者 | Evan Harris译者 | Monanfei编辑 | Jane 出品 | AI科技大本营(ID:rgznai100)【导语】这篇文章为大家介绍了一个开源项目——sk-dist。在一台没有并行化的单机上进行超参数调优,需要 7.2 分钟,而在一百多个核心的 Spark 群集…
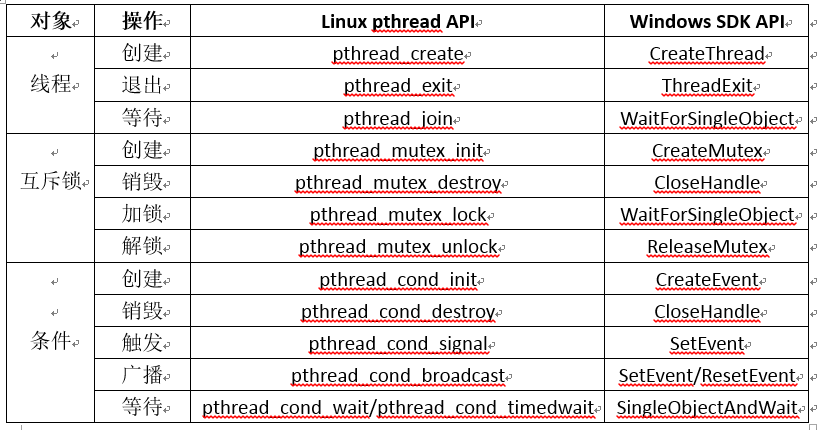
Windows和Linux下通用的线程接口
对于多线程开发,Linux下有pthread线程库,使用起来比较方便,而Windows没有,对于涉及到多线程的跨平台代码开发,会带来不便。这里参考网络上的一些文章,整理了在Windows和Linux下通用的线程接口。经过测试&am…
MySQL 性能调优的10个方法
MYSQL 应该是最流行了 WEB 后端数据库。WEB 开发语言最近发展很快,PHP, Ruby, Python, Java 各有特点,虽然 NOSQL 最近越來越多的被提到,但是相信大部分架构师还是会选择 MYSQL 来做数据存储。MYSQL 如此方便和稳定,以…

他们用卷积神经网络,发现了名画中隐藏的秘密
作者 | 神经小刀来源 |HyperAI超神经( ID: HyperAI)导语:著名的艺术珍品《根特祭坛画》,正在进行浩大的修复工作,以保证现在的人们能感受到这幅伟大的巨制,散发出的灿烂光芒。而随着技术的进步,…
机器学习公开课~~~~mooc
https://class.coursera.org/ntumlone-001/class/index
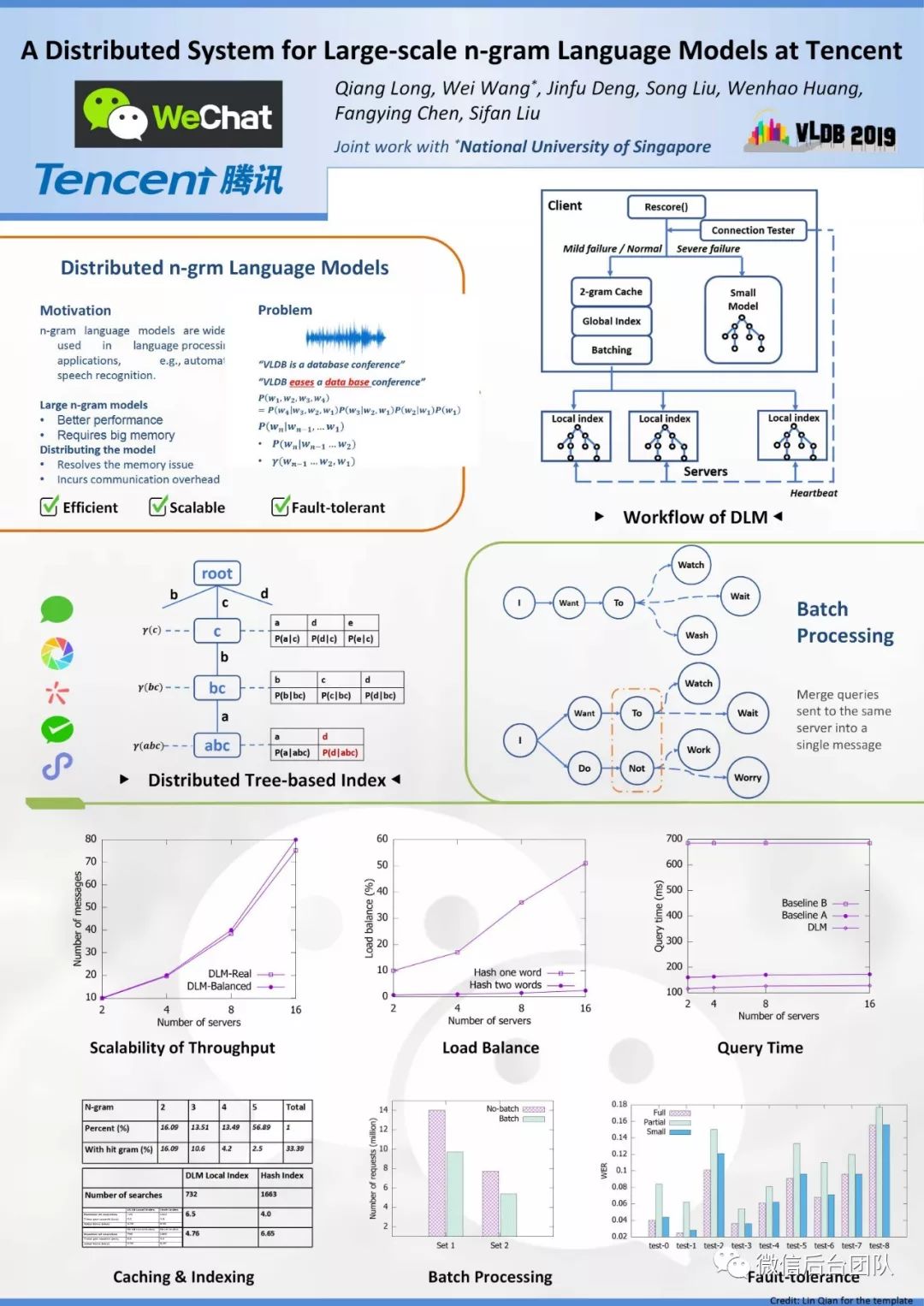
DLM:微信大规模分布式n-gram语言模型系统
来源 | 微信后台团队Wechat & NUS《A Distributed System for Large-scale n-gram Language Models at Tencent》分布式语言模型,支持大型n-gram LM解码的系统。本文是对原VLDB2019论文的简要翻译。摘要n-gram语言模型广泛用于语言处理,例如自动语音…
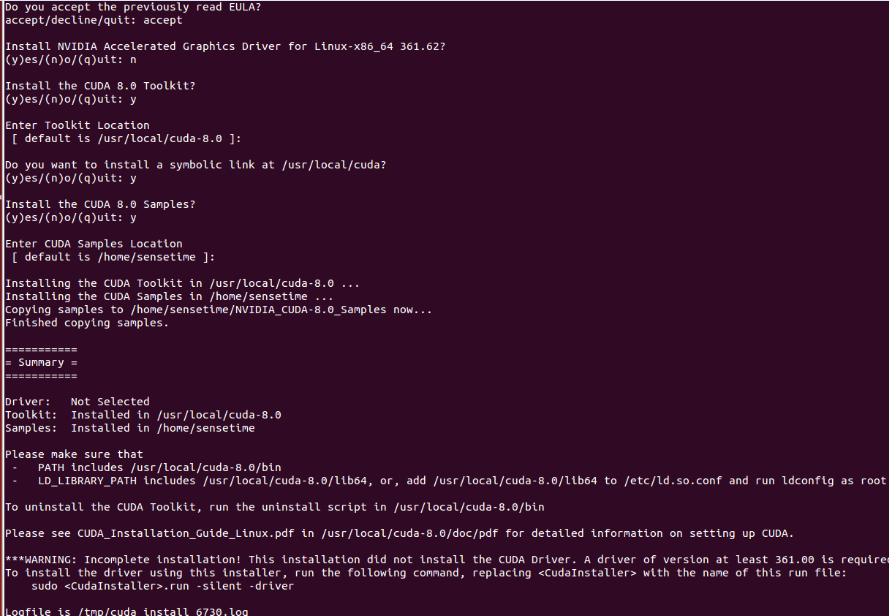
Ubuntu14.04 64位机上安装cuda8.0+cudnn5.0操作步骤
查看Ubuntu14.04 64位上显卡信息,执行:lspci | grep -i vga lspci -v -s 01:00.0 nvidia-smi第一条此命令可以显示一些显卡的相关信息;如果想查看某个详细信息,可以执行第二条命令;如果是NVIDIA卡, 可继续执行第三条命…

SQLI DUMB SERIES-5
less5 (1)输入单引号,回显错误,说明存在注入点。输入的Id被一对单引号所包围,可以闭合单引号 (2)输入正常时:?id1 说明没有显示位,因此不能使用联合查询了;可…
javascript RegExp
http://www.w3schools.com/jsref/jsref_obj_regexp.asp声明-------------modifiers:{i,g,m}1. var pattnew RegExp(pattern,modifiers);2. var patt/pattern/modifiers;------------------------例子:var str "Visit W3Schools"; //两…
Ubuntu14.04 64位机上安装OpenCV2.4.13(CUDA8.0)版操作步骤
Ubuntu14.04 64位机上安装CUDA8.0的操作步骤可以参考http://blog.csdn.net/fengbingchun/article/details/53840684,这里是在已经正确安装了CUDA8.0的基础上安装OpenCV2.4.13(CUDA8.0)操作步骤:1. 从http://opencv.org/downloads.html 下载OpenCV2.…
一篇文章能够看懂基础代码之CSS
web页面主要分为三块内容:js:控制用户行为和执行代码行为html元素:控制页面显示哪些控件(例如按钮,输入框,文本等)css:控制如何显示页面上的空间,例如布局,颜…

谷歌NIPS论文Transformer模型解读:只要Attention就够了
作者 | Sherwin Chen译者 | Major,编辑 | 夕颜出品 | AI科技大本营(ID:rgznai100)导读:在 NIPS 2017 上,谷歌的 Vaswani 等人提出了 Transformer 模型。它利用自我注意(self-attention)来计算其…

中国移动与苹果联姻 三星在华霸主地位或遭取代
据国外媒体12月24日报道,在各方的期待下,苹果终于宣布中国移动将于2014年1月17日开始销售支持其网络的iPhone手机。而中国移动也将于12 月25日开始正式接受预定。作为中国以及世界最大的移动运营商,中国移动与苹果的合作,将会帮助…