圆形 LBP 特征
template <typename _Tp> staticinline void elbp_(InputArray _src, OutputArray _dst,int radius, int neighbors) {// 得到数据矩阵Mat src = _src.getMat();// 输出矩阵_dst.create(src.rows-2*radius, src.cols-2*radius, CV_32SC1);Mat dst = _dst.getMat();// 初始化dst.setTo(0);for(int n=0; n<neighbors; n++) {// 相同点float x = static_cast<float>(-radius * sin(2.0*CV_PI*n/static_cast<float>(neighbors)));float y = static_cast<float>(radius * cos(2.0*CV_PI*n/static_cast<float>(neighbors)));// 相关索引int fx = static_cast<int>(floor(x));int fy = static_cast<int>(floor(y));int cx = static_cast<int>(ceil(x));int cy = static_cast<int>(ceil(y));// 小数部分float ty = y - fy;float tx = x - fx;// 集插值权重float w1 = (1 - tx) * (1 - ty);float w2 = tx * (1 - ty);float w3 = (1 - tx) * ty;float w4 = tx * ty;// 遍历数据for(int i=radius; i < src.rows-radius;i++) {for(int j=radius;j < src.cols-radius;j++) {// 插值计算值float t = static_cast<float>(w1*src.at<_Tp>(i+fy,j+fx) + w2*src.at<_Tp>(i+fy,j+cx) + w3*src.at<_Tp>(i+cy,j+fx)+ w4*src.at<_Tp>(i+cy,j+cx));// 限定浮点精度,生成输出图像dst.at<int>(i-radius,j-radius) += ((t > src.at<_Tp>(i,j)) || (std::abs(t-src.at<_Tp>(i,j)) < std::numeric_limits<float>::epsilon())) << n;}}}
}
转载:http://blog.csdn.net/zhuwei1988
相关文章:

40个Java多线程问题总结
(转) 这篇文章作者写的真是不错 40个问题汇总 1、多线程有什么用? 一个可能在很多人看来很扯淡的一个问题:我会用多线程就好了,还管它有什么用?在我看来,这个回答更扯淡。所谓"知其然知其所…
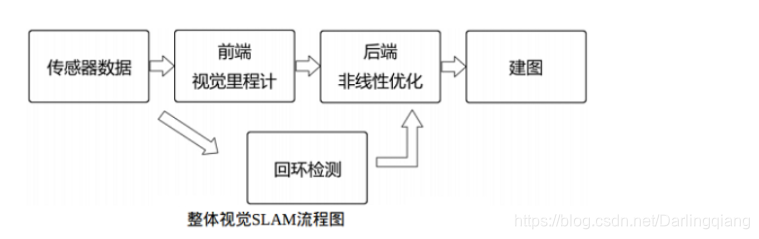
SLAM十四讲笔记1
文章目录ch02 初识SLAMch02-01 经典视觉SLAM框架ch02-02 SLAM问题的数学表述ch03 三维空间刚体运动ch03.01 旋转矩阵:点和向量,坐标系01 向量a在线性空间的基[e1,e2,e3][e_1,e_2,e_3][e1,e2,e3]下的坐标为[a1,a2,a3]T[a_1,a_2,a_3]^T[a1,a2,a3]T.02 向量…
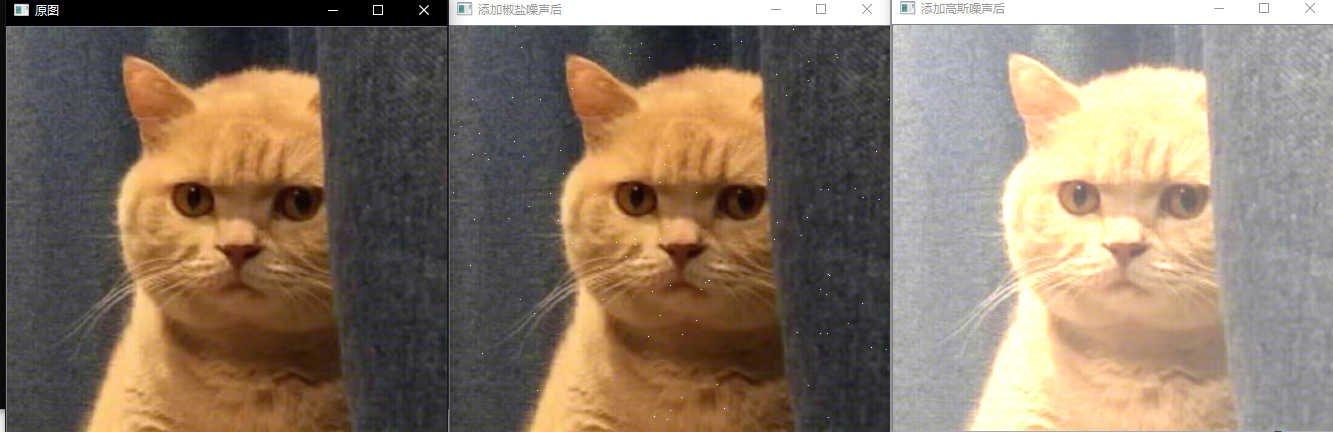
12、OpenCV实现图像的空间滤波——图像平滑
1、空间滤波基础概念 1、空间滤波基础 空间滤波一词中滤波取自数字信号处理,指接受或拒绝一定的频率成分,但是空间滤波学习内容实际上和通过傅里叶变换实现的频域的滤波是等效的,故而也称为滤波。空间滤波主要直接基于领域(空间域…
计算 LBP 特征
#include <opencv2/opencv.hpp> #include <opencv2/highgui/highgui.hpp> #include <opencv2/features2d/features2d.hpp> #include <opencv2/features2d/features2d.hpp> // 计算原始LBP特征 cv::Mat OLBP(cv::Mat& srcImage) {const int nRows …
三维重建【四】-------------------结构光 三维重建----论文调研
1. 动态目标实时三维重建-结构光方案 动态目标 三维重建 Stripe boundary codes for real-time structured-light range scanning of moving objects 我们提出了一种新的实时结构光扫描方法。在分析现有结构光技术的基本假设之后,我们基于编码投影条纹之间的边界&…

APP开发定制
app是什么意思? APP,application的简称,是智能手机的第三方应用程序,常见的有微信、手机qq、今日头条、手机支付宝、腾讯视频、微店等,随着智能手机和ipad等移动终端设备的普及,人们逐渐习惯了使用APP客户端上网的方式…
Haar 特征提取
double HaarExtract(double const ** image ,int type_, cv::Rect roi) {double value;double wh1, wh2;double bk1, bk2;int x roi.x;int y roi.y;int width roi.width;int height roi.height;switch (type_){// Haar水平边缘case 0: // HaarHEdgewh1 calcIntegral(image…
awk的基本⽤法
awk的基本⽤法 awk是报告⽣成器,格式化⽂本输出,有多种版本。centos中的是gawk即GNU awk版本。 awk⼯作原理:第⼀步:执⾏BEGIN{action;...}语句块中的语句。第⼆步:从⽂件或标准输⼊(stdin)读取…
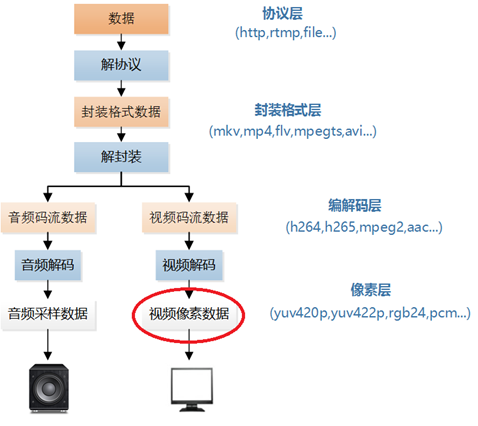
视音频数据处理入门:RGB、YUV像素数据处理【转】
转自:http://blog.csdn.net/leixiaohua1020/article/details/50534150 视音频数据处理入门系列文章: 视音频数据处理入门:RGB、YUV像素数据处理 视音频数据处理入门:PCM音频采样数据处理 视音频数据处理入门:H.264视频…
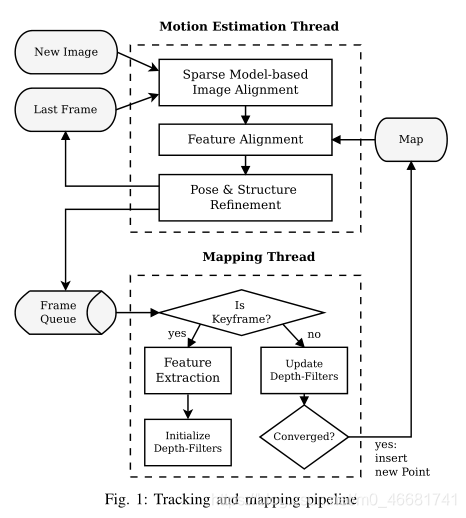
SVO(SVO: fast semi-direct monocular visual odometry)
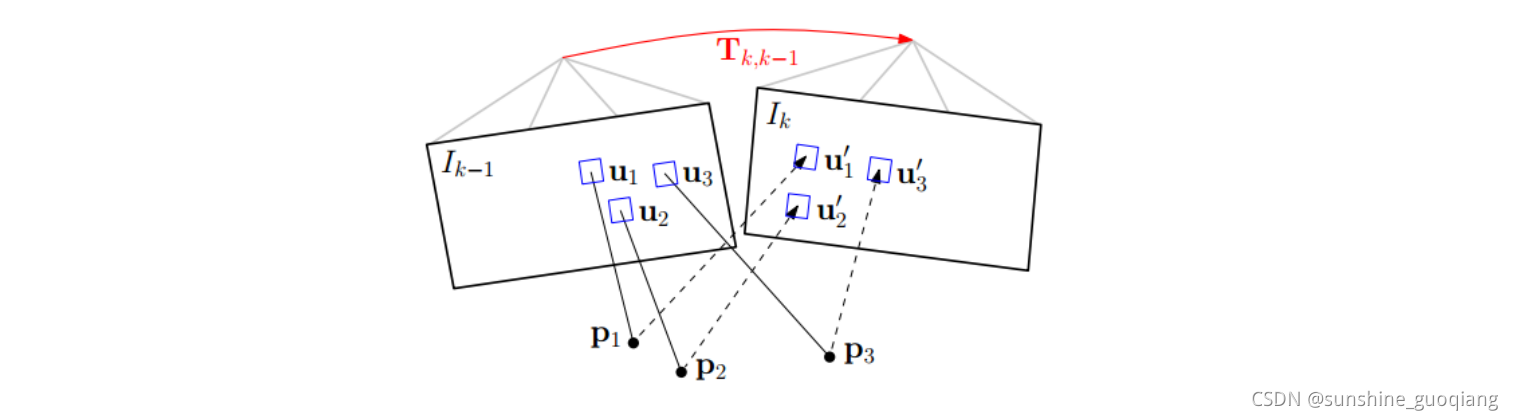
SVO(SVO: fast semi-direct monocular visual odometry)翻译 文章目录SVO(SVO: fast semi-direct monocular visual odometry)翻译1、介绍2、系统概述3、符号4、运动估计4.1、 基于稀疏模型的图像对齐4.2、 通过特征对齐松弛4.3、…
MSER 候选车牌区域检测
#include "opencv2/highgui/highgui.hpp" #include "opencv2/features2d/features2d.hpp" #include "opencv2/imgproc/imgproc.hpp" #include <iostream> // Mser车牌目标检测 std::vector<cv::Rect> mserGetPlate(cv::Mat srcImage…

从HelloWorld看Knative Serving代码实现
为什么80%的码农都做不了架构师?>>> 摘要: Knative Serving以Kubernetes和Istio为基础,支持无服务器应用程序和函数的部署并提供服务。我们从部署一个HelloWorld示例入手来分析Knative Serving的代码细节。 概念先知 官方给出的这…
svo_note
SVO论文笔记1.frame overviews2. Motion Estimate Thread2.1 Sparse Model-based Image Alignment 基于稀疏点亮度的位姿预估2.2 Relaxation Through Feature Alignment 基于图块的特征点匹配2.3 Pose and Structure Refinement3 Mapping Thread3.1 depth-filter3.2 初始化参考…
Druid 配置 wallfilter
这个文档提供基于Spring的各种配置方式 使用缺省配置的WallFilter <bean id"dataSource" class"com.alibaba.druid.pool.DruidDataSource" init-method"init" destroy-method"close">...<property name"filters" v…
vue下的bootstrap table + jquery treegrid, treegrid无法渲染的问题
在mian.js导入的包如下:该bootstrap-table-treegrid.js需要去下载,在复制到jquery-treegrid/js/ 1 import $ from jquery 2 import bootstrap/dist/css/bootstrap.min.css 3 import bootstrap/dist/js/bootstrap.min 4 import bootstrap-table/dist/boot…
内存和缓存的区别
今天看书的时候又看到了内存和缓存,之所以说又,是因为之前遇到过查过资料,但是现在又忘了(图侵删)。 所以又复习一遍,记录一下,有所纰漏的地方,欢迎指正。 同志们,上图并不是内存和缓存中的任何…
【Boost】noncopyable:不可拷贝
【CSDN】:boost::noncopyable解析 【Effective C】:条款06_若不想使用编译器自动生成地函数,就该明确拒绝 1.example boost::noncopyable 为什么要boost::noncopyable 在c中定义一个类的时候,如果不明确定义拷贝构造函数和拷贝赋…

BigData NoSQL —— ApsaraDB HBase数据存储与分析平台概览
一、引言时间到了2019年,数据库也发展到了一个新的拐点,有三个明显的趋势: 越来越多的数据库会做云原生(CloudNative),会不断利用新的硬件及云本身的优势打造CloudNative数据库,国内以阿里云的Cloud HBase、POLARDB为代…
ubuntu clion 创建桌面快捷方式
ubuntu clion 创建桌面快捷方式 首先在终端下输入 cd /usr/share/applications/进入applications目录下,建立一个clion.desktop文件 sudo touch clion.desktop然后在vim命令下编辑该文件 sudo vim clion.desktop进入vim后,按i插入开始编辑该文件&…
Flex 布局:语法篇
2019独角兽企业重金招聘Python工程师标准>>> 布局的传统解决方案,基于盒状模型,依赖 display 属性 position 属性 float 属性。它对于那些特殊布局非常不方便,比如,垂直居中就不容易实现。 2009年,W3C 提…
特征运动点估计
cv::Mat getRansacMat(const std::vector<cv::DMatch>& matches, const std::vector<cv::KeyPoint>& keypoints1, const std::vector<cv::KeyPoint>& keypoints2, std::vector<cv::DMatch>& outMatches) {// 转换特征点格式std::vecto…

Vue+Element-ui+二级联动封装组件
通过父子组件传值 父组件: 1 <template>2 <linkage :citysList"citysList" :holder"holder" saveId"saveId"></linkage>3 </template>4 <script>5 import linkage from ./common/linkage6 export de…
MOG2 成员函数参数设定
pMOG2->setDetectShadows(true); // 背景模型影响帧数 默认为500 pMOG2->setHistory(1000); // 模型匹配阈值 pMOG2->setVarThreshold(50); // 阴影阈值 pMOG2->setShadowThreshold(0.7);前景中模型参数,设置为0表示背景,255为前景ÿ…

webpack 大法好 ---- 基础概念与配置(1)
再一次见面! Light 还是太太太懒了,距离上一篇没啥营养的文章已经过去好多天。今天为大家介绍介绍 webpack 最基本的概念,以及简单的配置,让你能快速得搭建一个可用的 webpack 开发环境。 webpack的安装 webpack 运行于 node 环境…

Zookeeper迁移(扩容/缩容)
zookeeper选举原理在迁移前有必要了解zookeeper的选举原理,以便更科学的迁移。快速选举FastLeaderElectionzookeeper默认使用快速选举,在此重点了解快速选举:向集群中的其他zookeeper建立连接,并且只有myid比对方大的连接才会被接…
SVO Without ROS环境搭建
Installation: Plain CMake (No ROS) 首先,建立工作目录:workspace,然后把下面的需要的都在该目录下进行. mkdir workspace cd workspace Boost - c Librairies (thread and system are needed) sudo apt-get install libboost-all-dev Eige…
BackgroundSubtractorGMG 背景建模
#include <opencv2/bgsegm.hpp> #include <opencv2/video.hpp> #include <opencv2/opencv.hpp> #include <iostream> #include <sstream> using namespace cv; using namespace std; using namespace bgsegm; // GMG目标建模检测 void detectBac…
启动webpack-dev-server只能本机访问的解决办法
修改package.json的dev启动设置,增加--host 0.0.0.0启动后localhost更换为本机IP即可访问
TCP/IP:IP选项处理
引言 IP输入函数要对IP 进行选项处理,。RFC791和1122规定了IP选项和处理规则。一个IP首部可以跟40个字节的选项。 选项格式 选项的格式,分为两种类型,单字节和多字节。 ip_dooptions函数 这个函数用于判断分组转发。用常量位移访问IP选项字段…
【SVO2.0 安装编译】Ubuntu 20.04 + Noetic
ways one 链接: https://pan.baidu.com/s/1ZAkeD64wjFsDHfpCm1CB1w 提取码: kxx2 (downloads and use idirectly) ways two: [SVO2-OPEN: https://github.com/uzh-rpg/rpg_svo_pro_open](https://github.com/DEARsunshine/rpg_svo_pro_open)git挂梯子 如果各位终端无法挂梯…