特征运动点估计
cv::Mat getRansacMat(const std::vector<cv::DMatch>& matches,
const std::vector<cv::KeyPoint>& keypoints1,
const std::vector<cv::KeyPoint>& keypoints2,
std::vector<cv::DMatch>& outMatches)
{// 转换特征点格式std::vector<cv::Point2f> points1, points2;cv::Mat featureMat;for (std::vector<cv::DMatch>::const_iterator it =matches.begin(); it!= matches.end(); ++it){// 获取特征点的左侧位置float x= keypoints1[it->queryIdx].pt.x;float y= keypoints1[it->queryIdx].pt.y;points1.push_back(cv::Point2f(x,y));// 获取特征点的右侧位置x= keypoints2[it->trainIdx].pt.x;y= keypoints2[it->trainIdx].pt.y;points2.push_back(cv::Point2f(x,y));}// 计算 good 特征矩阵std::vector<uchar> inliers(points1.size(),0);if (points1.size()>0 &&points2.size()>0){// 计算两幅图像的对应点的特征矩阵cv::Mat featureMat= cv::findFundamentalMat(cv::Mat(points1),cv::Mat(points2), inliers,CV_FM_RANSAC,distance,confidence);// 提取存在特征点匹配std::vector<uchar>::const_iteratoritIn= inliers.begin();std::vector<cv::DMatch>::const_iteratoritM= matches.begin();// 遍历所有特征点for ( ;itIn!= inliers.end(); ++itIn, ++itM){if (*itIn)outMatches.push_back(*itM);}if (refineF){points1.clear();points2.clear();for (std::vector<cv::DMatch>::const_iterator it= outMatches.begin();it!= outMatches.end(); ++it){float x= keypoints1[it->queryIdx].pt.x;float y= keypoints1[it->queryIdx].pt.y;points1.push_back(cv::Point2f(x,y));x= keypoints2[it->trainIdx].pt.x;y= keypoints2[it->trainIdx].pt.y;points2.push_back(cv::Point2f(x,y));}// 计算两幅图像的特征矩阵if (points1.size()>0 && points2.size()>0){featureMat= cv::findFundamentalMat(cv::Mat(points1),cv::Mat(points2),CV_FM_8POINT);}}}return featureMat;}转载:http://blog.csdn.net/zhuwei1988
相关文章:

Vue+Element-ui+二级联动封装组件
通过父子组件传值 父组件: 1 <template>2 <linkage :citysList"citysList" :holder"holder" saveId"saveId"></linkage>3 </template>4 <script>5 import linkage from ./common/linkage6 export de…

MOG2 成员函数参数设定
pMOG2->setDetectShadows(true); // 背景模型影响帧数 默认为500 pMOG2->setHistory(1000); // 模型匹配阈值 pMOG2->setVarThreshold(50); // 阴影阈值 pMOG2->setShadowThreshold(0.7);前景中模型参数,设置为0表示背景,255为前景ÿ…

webpack 大法好 ---- 基础概念与配置(1)
再一次见面! Light 还是太太太懒了,距离上一篇没啥营养的文章已经过去好多天。今天为大家介绍介绍 webpack 最基本的概念,以及简单的配置,让你能快速得搭建一个可用的 webpack 开发环境。 webpack的安装 webpack 运行于 node 环境…

Zookeeper迁移(扩容/缩容)
zookeeper选举原理在迁移前有必要了解zookeeper的选举原理,以便更科学的迁移。快速选举FastLeaderElectionzookeeper默认使用快速选举,在此重点了解快速选举:向集群中的其他zookeeper建立连接,并且只有myid比对方大的连接才会被接…
SVO Without ROS环境搭建
Installation: Plain CMake (No ROS) 首先,建立工作目录:workspace,然后把下面的需要的都在该目录下进行. mkdir workspace cd workspace Boost - c Librairies (thread and system are needed) sudo apt-get install libboost-all-dev Eige…
BackgroundSubtractorGMG 背景建模
#include <opencv2/bgsegm.hpp> #include <opencv2/video.hpp> #include <opencv2/opencv.hpp> #include <iostream> #include <sstream> using namespace cv; using namespace std; using namespace bgsegm; // GMG目标建模检测 void detectBac…
启动webpack-dev-server只能本机访问的解决办法
修改package.json的dev启动设置,增加--host 0.0.0.0启动后localhost更换为本机IP即可访问
TCP/IP:IP选项处理
引言 IP输入函数要对IP 进行选项处理,。RFC791和1122规定了IP选项和处理规则。一个IP首部可以跟40个字节的选项。 选项格式 选项的格式,分为两种类型,单字节和多字节。 ip_dooptions函数 这个函数用于判断分组转发。用常量位移访问IP选项字段…
【SVO2.0 安装编译】Ubuntu 20.04 + Noetic
ways one 链接: https://pan.baidu.com/s/1ZAkeD64wjFsDHfpCm1CB1w 提取码: kxx2 (downloads and use idirectly) ways two: [SVO2-OPEN: https://github.com/uzh-rpg/rpg_svo_pro_open](https://github.com/DEARsunshine/rpg_svo_pro_open)git挂梯子 如果各位终端无法挂梯…
人眼目标检测初始化
// 初始化摄像头读取视频流cv::VideoCapture cap(0);// 宽高设置为320*256cap.set(CV_CAP_PROP_FRAME_WIDTH, 320);cap.set(CV_CAP_PROP_FRAME_HEIGHT, 256);// 读取级联分类器// 文件存放在opencv\sources\data\haarcascades bool flagGlasses false;if(flagGlasses){face_ca…
Qt之界面换肤
简述 常用的软件基本都有换肤功能,例如:QQ、360、迅雷等。换肤其实很简单,并没有想象中那么难,利用前面分享过的QSS系列文章,沃我们完全可以实现各种样式的定制! 简述实现原理效果新建QSS文件编写QSS代码加…
mongDB的常用操作总结
目录 常用查询:查询一条数据查询子元素集合:image.idgte: 大于等于,lte小于等于...查询字段不存在的数据not查询数量:常用更新更新第一条数据的一个字段:更新一条数据的多个字段:常用删除删除:常用查询: 查询一条数据 精确匹配is Query(Criteria.where("id").is(id))…
【GTSAM】GTSAM学习
1 what GTSAM ? GTSAM 是一个在机器人领域和计算机视觉领域用于平滑(smoothing)和建图(mapping)的C库。它与g2o不同的是,g2o采用稀疏矩阵的方式求解一个非线性优化问题,而GTSAM是采用因子图(f…
人脸、人眼检测与跟踪
#include <opencv2/opencv.hpp> #include <iostream> #include <vector> using namespace cv;CascadeClassifier face_cascade; CascadeClassifier eye_cascade;// 人眼检测 int detectEye(cv::Mat& im, cv::Mat& tpl, cv::Rect& rect) {std::v…
linux下jdk简单配置记录
记录哈,搭建环境的时候,copy使用方便。 vim /etc/profile export JAVA_HOME/usr/java/jdk1.7.0_79export PATH$JAVA_HOME/bin:$PATHexport CLASSPATH.:$JAVA_HOME/lib/dt.jar:$JAVA_HOME/lib/tools.jarexport JRE_HOME$JAVA_HOME/jreexport LANGzh_CN.UT…
Ubuntu中Could not get lock /var/lib/dpkg/lock解决方案
关于Ubuntu中Could not get lock /var/lib/dpkg/lock解决方案 转载于:https://www.cnblogs.com/daemonFlY/p/10916812.html
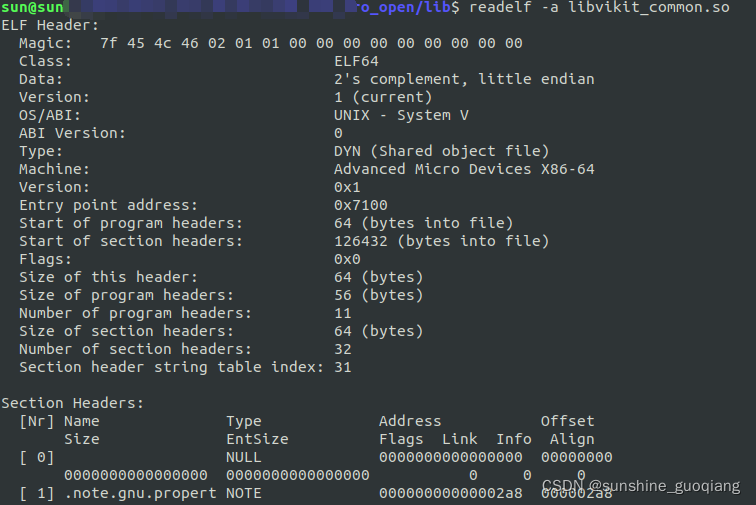
so库方法原理
动态库 So库,又动态名库,是Linux下最常见的文件之一,是一种ELF文件。这种so库是程序运行时,才会将这些需要的代码拷贝到对应的内存中。但程序运行时,这些地址早已经确定,那程序引用so库中的这些代码地址如…
上传图片,多图上传,预览功能,js原生无依赖
最近很好奇前端的文件上传功能,因为公司要求做一个支持图片预览的图片上传插件,所以自己搜了很多相关的插件,虽然功能很多,但有些地方不能根据公司的想法去修改,而且需要依赖jQuery或Bootstrap库,所以我就想…
springboot 简单自定义starter - beetl
使用idea新建springboot项目beetl-spring-boot-starter 首先添加pom依赖 packaging要设置为jar不能设置为pom<packaging>jar</packaging> <dependency><groupId>org.springframework.boot</groupId><artifactId>spring-boot-starter-web&…
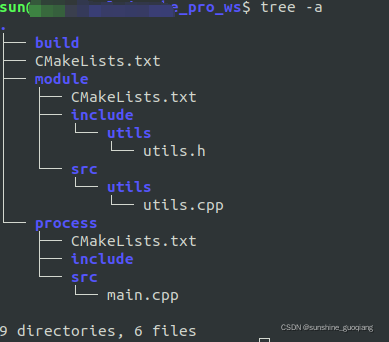
cmake生成so包并调用(C++project,build,cmake)
1. 目录结构 2 . downloads 2.1 build module process CMakeLists.txt > cmake_minimum_required(VERSION 3.5)if(CMAKE_COMPILER_IS_GNUCC)message("COMPILER IS GNUCC")ADD_DEFINITIONS ( -stdc11 ) endif(CMAKE_COMPILER_IS_GNUCC)SET(CMAKE_CXX_FLAGS_DEBU…
人眼模板匹配自动跟踪
void trackEye(cv::Mat& im, cv::Mat& tpl, cv::Rect& rect) {// 人眼位置cv::Size pSize(rect.width * 2, rect.height * 2);// 矩形区域cv::Rect tRect(rect pSize - cv::Point(pSize.width/2, pSize.height/2));tRect & cv::Rect(0, 0, im.cols, im.rows);…
前端碎碎念 之 nextTick, setTimeout 以及 setImmediate 三者的执行顺序
『前端碎碎念』系列会记录我平时看书或者看文章遇到的问题,一般都是比较基础但是容易遗忘的知识点,你也可能会在面试中碰到。 我会查阅一些资料并可能加上自己的理解,来记录这些问题。更多文章请前往我的个人博客这个问题是有关执行顺序和Eve…
bat 将war文件转换成ear文件
1、无需拷贝war文件,自动获取war set path%path%;D:\jdk\jdk1.6.0_31\bin;C:\Program Files\7-Zip del **0001-controller.war del **0001-controllerEAR.ear copy ..\target\**0001-controller-0.0.1-SNAPSHOT.war **0001-controller.war rem 7z d -tzip **0001-co…
cmake语法【一】
一、Cmake 简介 cmake 是一个跨平台、开源的构建系统。它是一个集软件构建、测试、打包于一身的软件。它使用与平台和编译器独立的配置文件来对软件编译过程进行控制。 二、常用命令 指定 cmake 的最小版本 cmake_minimum_required(VERSION 3.4.1)这行命令是可选的ÿ…

RHEL6.3安装vsftpd
1、下载vsftpd,可以从官网(http://vsftpd.beasts.org)下载,也可以百度搜索[rootlocalhost vsftpd]# wget http://down1.chinaunix.net/distfiles/vsftpd-3.0.2.tar.gz2、解压压缩包并进入解压出来的目录[rootlocalhost vsftpd]# t…
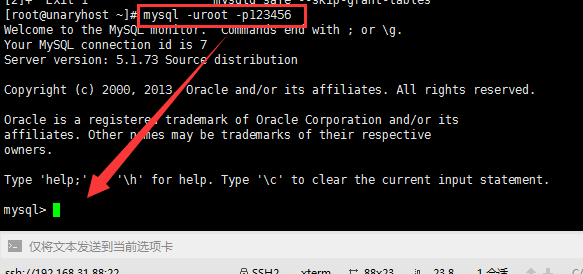
创建mysql数据库,在新数据库中创建表,再尝试删除表
创建之前,先登录数据库存 mysql -u 账号 -p密码 登录完成后,展示一下已存在的数据库 show databases; 创建数据库 create database test111; 然后展示一下数据库,如下 show databases; 使用数据库 use test; 在test数据库里面看一下已存在的…
cmake:在各级目录之间共享变量(cmake cache变量)
摘要: 本文记录一下 CMake 变量的定义、原理及其使用。CMake 变量包含 Normal Variables、Cache Variables。通过 set 指令可以设置两种不同的变量。也可以在 CMake 脚本中使用和设置环境变量。set(ENV{} …),本文重点讲述 CMake 脚本语言特有的两种变量。 正文&am…
antd+dva笔记
参考 React中函数式声明组件Dva Ant Design 前后端分离之 React 应用实践ReactDvaJS 之 hook 路由权限控制dva 知识地图react-router Guides and API docs (v2, v3)react-sage redux-saga 是一个用于管理 Redux 应用异步操作,可以用来代替 redux-thunk 中间件。《Redux-saga 中…
求两个矩形重叠部分的面积
#include<stdio.h> #include<math.h>#define areaFile "area.txt" #define perportionFile "perportion.txt"#define min(a,b) ( ((a)>(b)) ? (b):(a) ) #define max(a,b) ( ((a)>(b)) ? (a):(b) )typedef struct xy { int x; int y; …
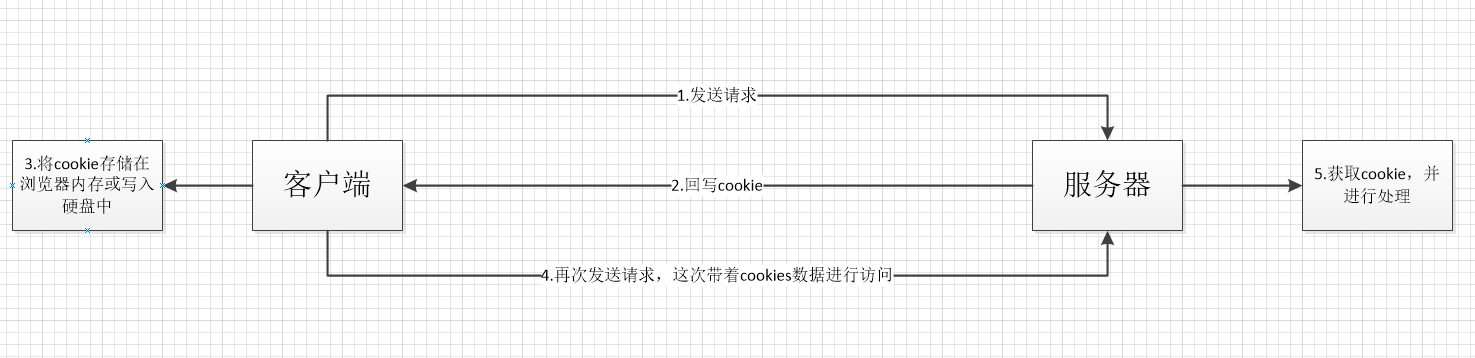
session,cookie,sessionStorage,localStorage的区别及应用场景
浏览器的缓存机制提供了可以将用户数据存储在客户端上的方式,可以利用cookie,session等跟服务端进行数据交互。 一、cookie和session cookie和session都是用来跟踪浏览器用户身份的会话方式。 区别: 1、保持状态:cookie保存在浏览器端&#x…