MSER 候选车牌区域检测
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/features2d/features2d.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include <iostream>
// Mser车牌目标检测
std::vector<cv::Rect> mserGetPlate(cv::Mat srcImage)
{// HSV空间转换cv::Mat gray, gray_neg;cv::Mat hsi;cv::cvtColor(srcImage, hsi, CV_BGR2HSV);// 通道分离std::vector<cv::Mat> channels;cv::split(hsi, channels);// 提取h通道gray = channels[1];// 灰度转换 cv::cvtColor(srcImage, gray, CV_BGR2GRAY);// 取反值灰度gray_neg = 255 - gray;std::vector<std::vector<cv::Point> > regContours;std::vector<std::vector<cv::Point> > charContours;// 创建MSER对象cv::Ptr<cv::MSER> mesr1 = cv::MSER::create(2, 10, 5000, 0.5, 0.3);cv::Ptr<cv::MSER> mesr2 = cv::MSER::create(2, 2, 400, 0.1, 0.3);std::vector<cv::Rect> bboxes1;std::vector<cv::Rect> bboxes2;// MSER+ 检测mesr1->detectRegions(gray, regContours, bboxes1);// MSER-操作mesr2->detectRegions(gray_neg, charContours, bboxes2);cv::Mat mserMapMat =cv::Mat::zeros(srcImage.size(), CV_8UC1);cv::Mat mserNegMapMat =cv::Mat::zeros(srcImage.size(), CV_8UC1);for (int i = (int)regContours.size() - 1; i >= 0; i--){// 根据检测区域点生成mser+结果const std::vector<cv::Point>& r = regContours[i];for (int j = 0; j < (int)r.size(); j++){cv::Point pt = r[j];mserMapMat.at<unsigned char>(pt) = 255;}}// MSER- 检测for (int i = (int)charContours.size() - 1; i >= 0; i--){// 根据检测区域点生成mser-结果const std::vector<cv::Point>& r = charContours[i];for (int j = 0; j < (int)r.size(); j++){cv::Point pt = r[j];mserNegMapMat.at<unsigned char>(pt) = 255;}}// mser结果输出cv::Mat mserResMat;// mser+与mser-位与操作mserResMat = mserMapMat & mserNegMapMat;cv::imshow("mserMapMat", mserMapMat);cv::imshow("mserNegMapMat", mserNegMapMat);cv::imshow("mserResMat", mserResMat);// 闭操作连接缝隙cv::Mat mserClosedMat;cv::morphologyEx(mserResMat, mserClosedMat,cv::MORPH_CLOSE, cv::Mat::ones(1, 20, CV_8UC1));cv::imshow("mserClosedMat", mserClosedMat);// 寻找外部轮廓std::vector<std::vector<cv::Point> > plate_contours;cv::findContours(mserClosedMat, plate_contours,CV_RETR_EXTERNAL,CV_CHAIN_APPROX_SIMPLE, cv::Point(0, 0));// 候选车牌区域判断输出std::vector<cv::Rect> candidates;for (size_t i = 0; i != plate_contours.size(); ++i){// 求解最小外界矩形cv::Rect rect = cv::boundingRect(plate_contours[i]);// 宽高比例double wh_ratio = rect.width / double(rect.height);// 不符合尺寸条件判断if (rect.height > 20 && wh_ratio > 4 && wh_ratio < 7)candidates.push_back(rect);}return candidates;
}
int main()
{cv::Mat srcImage = cv::imread("34.jpg");if (srcImage.empty())return-1;// 候选车牌区域检测std::vector<cv::Rect> candidates;candidates = mserGetPlate(srcImage);// 车牌区域显示for (int i = 0; i < candidates.size(); ++i) {cv::imshow("rect", srcImage(candidates[i]));cv::waitKey();}return 0;
}
转载:http://blog.csdn.net/zhuwei1988
相关文章:

从HelloWorld看Knative Serving代码实现
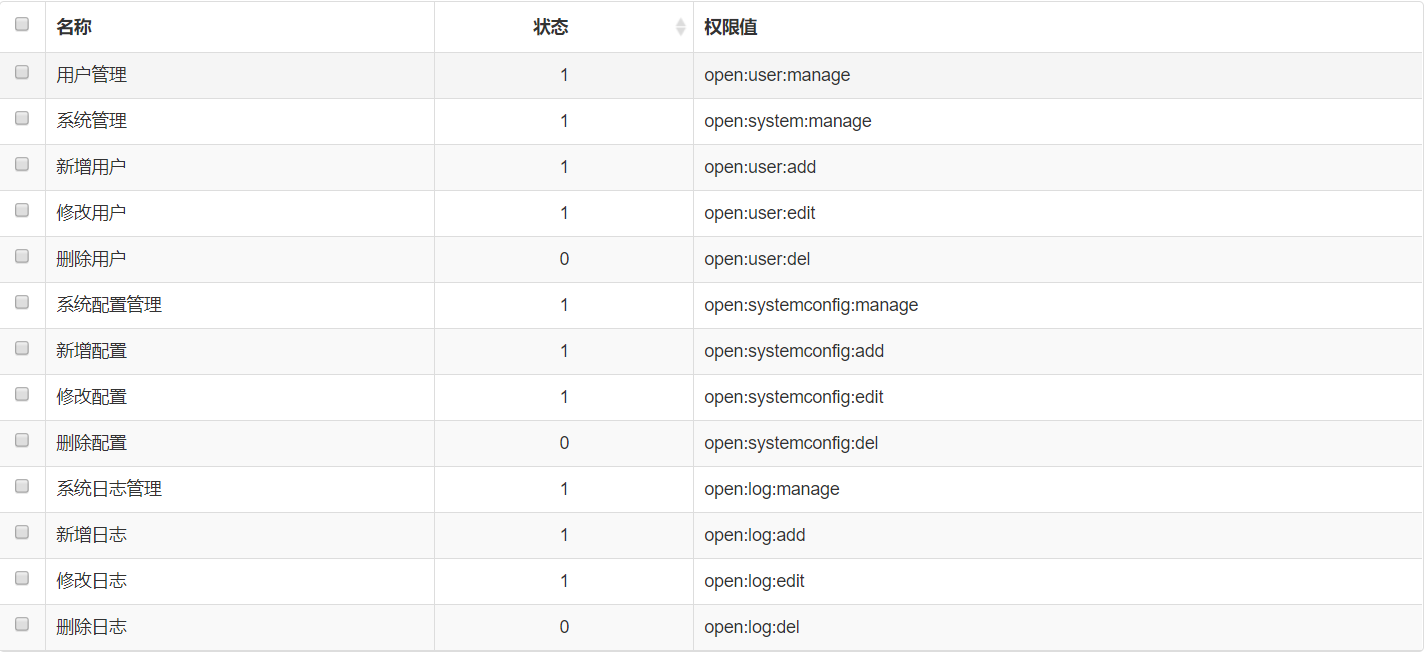
为什么80%的码农都做不了架构师?>>> 摘要: Knative Serving以Kubernetes和Istio为基础,支持无服务器应用程序和函数的部署并提供服务。我们从部署一个HelloWorld示例入手来分析Knative Serving的代码细节。 概念先知 官方给出的这…
svo_note
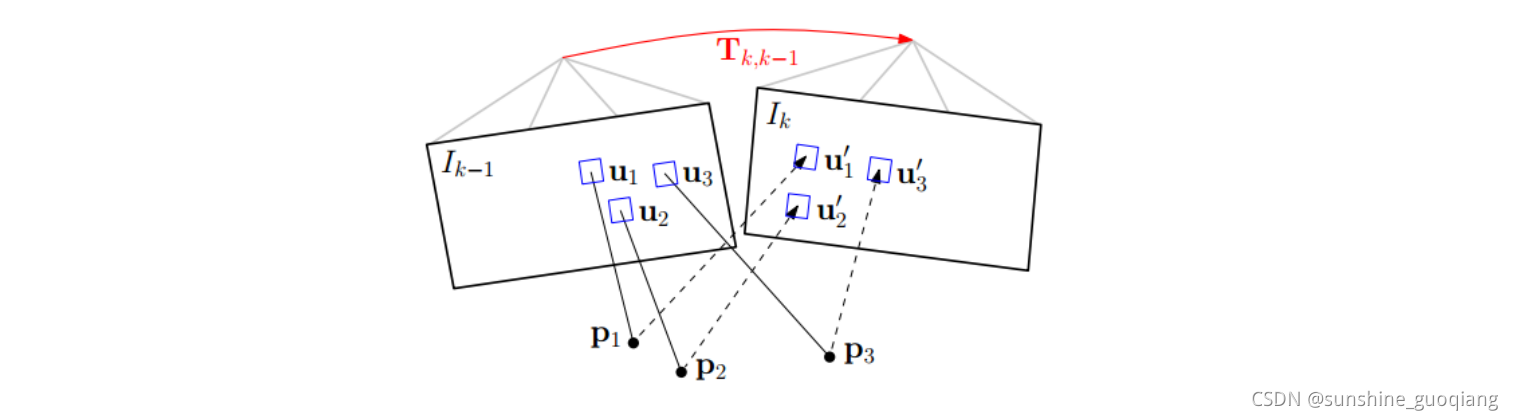
SVO论文笔记1.frame overviews2. Motion Estimate Thread2.1 Sparse Model-based Image Alignment 基于稀疏点亮度的位姿预估2.2 Relaxation Through Feature Alignment 基于图块的特征点匹配2.3 Pose and Structure Refinement3 Mapping Thread3.1 depth-filter3.2 初始化参考…

Druid 配置 wallfilter
这个文档提供基于Spring的各种配置方式 使用缺省配置的WallFilter <bean id"dataSource" class"com.alibaba.druid.pool.DruidDataSource" init-method"init" destroy-method"close">...<property name"filters" v…
vue下的bootstrap table + jquery treegrid, treegrid无法渲染的问题
在mian.js导入的包如下:该bootstrap-table-treegrid.js需要去下载,在复制到jquery-treegrid/js/ 1 import $ from jquery 2 import bootstrap/dist/css/bootstrap.min.css 3 import bootstrap/dist/js/bootstrap.min 4 import bootstrap-table/dist/boot…
内存和缓存的区别
今天看书的时候又看到了内存和缓存,之所以说又,是因为之前遇到过查过资料,但是现在又忘了(图侵删)。 所以又复习一遍,记录一下,有所纰漏的地方,欢迎指正。 同志们,上图并不是内存和缓存中的任何…
【Boost】noncopyable:不可拷贝
【CSDN】:boost::noncopyable解析 【Effective C】:条款06_若不想使用编译器自动生成地函数,就该明确拒绝 1.example boost::noncopyable 为什么要boost::noncopyable 在c中定义一个类的时候,如果不明确定义拷贝构造函数和拷贝赋…

BigData NoSQL —— ApsaraDB HBase数据存储与分析平台概览
一、引言时间到了2019年,数据库也发展到了一个新的拐点,有三个明显的趋势: 越来越多的数据库会做云原生(CloudNative),会不断利用新的硬件及云本身的优势打造CloudNative数据库,国内以阿里云的Cloud HBase、POLARDB为代…
ubuntu clion 创建桌面快捷方式
ubuntu clion 创建桌面快捷方式 首先在终端下输入 cd /usr/share/applications/进入applications目录下,建立一个clion.desktop文件 sudo touch clion.desktop然后在vim命令下编辑该文件 sudo vim clion.desktop进入vim后,按i插入开始编辑该文件&…
Flex 布局:语法篇
2019独角兽企业重金招聘Python工程师标准>>> 布局的传统解决方案,基于盒状模型,依赖 display 属性 position 属性 float 属性。它对于那些特殊布局非常不方便,比如,垂直居中就不容易实现。 2009年,W3C 提…
特征运动点估计
cv::Mat getRansacMat(const std::vector<cv::DMatch>& matches, const std::vector<cv::KeyPoint>& keypoints1, const std::vector<cv::KeyPoint>& keypoints2, std::vector<cv::DMatch>& outMatches) {// 转换特征点格式std::vecto…

Vue+Element-ui+二级联动封装组件
通过父子组件传值 父组件: 1 <template>2 <linkage :citysList"citysList" :holder"holder" saveId"saveId"></linkage>3 </template>4 <script>5 import linkage from ./common/linkage6 export de…
MOG2 成员函数参数设定
pMOG2->setDetectShadows(true); // 背景模型影响帧数 默认为500 pMOG2->setHistory(1000); // 模型匹配阈值 pMOG2->setVarThreshold(50); // 阴影阈值 pMOG2->setShadowThreshold(0.7);前景中模型参数,设置为0表示背景,255为前景ÿ…

webpack 大法好 ---- 基础概念与配置(1)
再一次见面! Light 还是太太太懒了,距离上一篇没啥营养的文章已经过去好多天。今天为大家介绍介绍 webpack 最基本的概念,以及简单的配置,让你能快速得搭建一个可用的 webpack 开发环境。 webpack的安装 webpack 运行于 node 环境…

Zookeeper迁移(扩容/缩容)
zookeeper选举原理在迁移前有必要了解zookeeper的选举原理,以便更科学的迁移。快速选举FastLeaderElectionzookeeper默认使用快速选举,在此重点了解快速选举:向集群中的其他zookeeper建立连接,并且只有myid比对方大的连接才会被接…
SVO Without ROS环境搭建
Installation: Plain CMake (No ROS) 首先,建立工作目录:workspace,然后把下面的需要的都在该目录下进行. mkdir workspace cd workspace Boost - c Librairies (thread and system are needed) sudo apt-get install libboost-all-dev Eige…
BackgroundSubtractorGMG 背景建模
#include <opencv2/bgsegm.hpp> #include <opencv2/video.hpp> #include <opencv2/opencv.hpp> #include <iostream> #include <sstream> using namespace cv; using namespace std; using namespace bgsegm; // GMG目标建模检测 void detectBac…
启动webpack-dev-server只能本机访问的解决办法
修改package.json的dev启动设置,增加--host 0.0.0.0启动后localhost更换为本机IP即可访问
TCP/IP:IP选项处理
引言 IP输入函数要对IP 进行选项处理,。RFC791和1122规定了IP选项和处理规则。一个IP首部可以跟40个字节的选项。 选项格式 选项的格式,分为两种类型,单字节和多字节。 ip_dooptions函数 这个函数用于判断分组转发。用常量位移访问IP选项字段…
【SVO2.0 安装编译】Ubuntu 20.04 + Noetic
ways one 链接: https://pan.baidu.com/s/1ZAkeD64wjFsDHfpCm1CB1w 提取码: kxx2 (downloads and use idirectly) ways two: [SVO2-OPEN: https://github.com/uzh-rpg/rpg_svo_pro_open](https://github.com/DEARsunshine/rpg_svo_pro_open)git挂梯子 如果各位终端无法挂梯…
人眼目标检测初始化
// 初始化摄像头读取视频流cv::VideoCapture cap(0);// 宽高设置为320*256cap.set(CV_CAP_PROP_FRAME_WIDTH, 320);cap.set(CV_CAP_PROP_FRAME_HEIGHT, 256);// 读取级联分类器// 文件存放在opencv\sources\data\haarcascades bool flagGlasses false;if(flagGlasses){face_ca…
Qt之界面换肤
简述 常用的软件基本都有换肤功能,例如:QQ、360、迅雷等。换肤其实很简单,并没有想象中那么难,利用前面分享过的QSS系列文章,沃我们完全可以实现各种样式的定制! 简述实现原理效果新建QSS文件编写QSS代码加…
mongDB的常用操作总结
目录 常用查询:查询一条数据查询子元素集合:image.idgte: 大于等于,lte小于等于...查询字段不存在的数据not查询数量:常用更新更新第一条数据的一个字段:更新一条数据的多个字段:常用删除删除:常用查询: 查询一条数据 精确匹配is Query(Criteria.where("id").is(id))…
【GTSAM】GTSAM学习
1 what GTSAM ? GTSAM 是一个在机器人领域和计算机视觉领域用于平滑(smoothing)和建图(mapping)的C库。它与g2o不同的是,g2o采用稀疏矩阵的方式求解一个非线性优化问题,而GTSAM是采用因子图(f…
人脸、人眼检测与跟踪
#include <opencv2/opencv.hpp> #include <iostream> #include <vector> using namespace cv;CascadeClassifier face_cascade; CascadeClassifier eye_cascade;// 人眼检测 int detectEye(cv::Mat& im, cv::Mat& tpl, cv::Rect& rect) {std::v…
linux下jdk简单配置记录
记录哈,搭建环境的时候,copy使用方便。 vim /etc/profile export JAVA_HOME/usr/java/jdk1.7.0_79export PATH$JAVA_HOME/bin:$PATHexport CLASSPATH.:$JAVA_HOME/lib/dt.jar:$JAVA_HOME/lib/tools.jarexport JRE_HOME$JAVA_HOME/jreexport LANGzh_CN.UT…
Ubuntu中Could not get lock /var/lib/dpkg/lock解决方案
关于Ubuntu中Could not get lock /var/lib/dpkg/lock解决方案 转载于:https://www.cnblogs.com/daemonFlY/p/10916812.html
so库方法原理
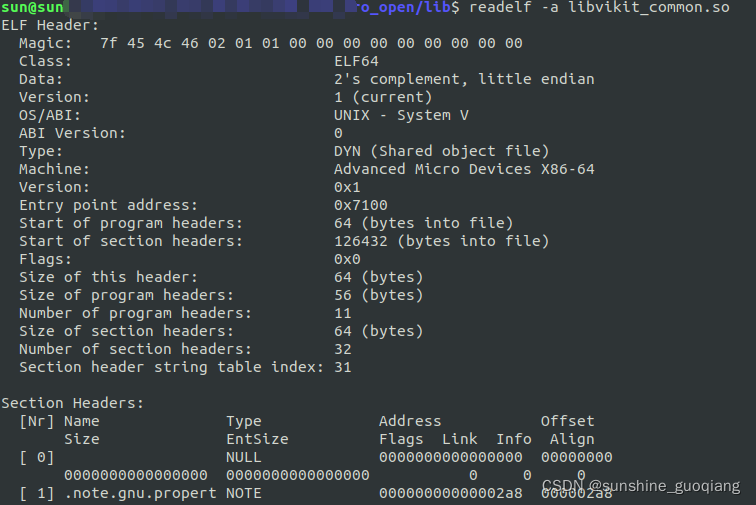
动态库 So库,又动态名库,是Linux下最常见的文件之一,是一种ELF文件。这种so库是程序运行时,才会将这些需要的代码拷贝到对应的内存中。但程序运行时,这些地址早已经确定,那程序引用so库中的这些代码地址如…
上传图片,多图上传,预览功能,js原生无依赖
最近很好奇前端的文件上传功能,因为公司要求做一个支持图片预览的图片上传插件,所以自己搜了很多相关的插件,虽然功能很多,但有些地方不能根据公司的想法去修改,而且需要依赖jQuery或Bootstrap库,所以我就想…
springboot 简单自定义starter - beetl
使用idea新建springboot项目beetl-spring-boot-starter 首先添加pom依赖 packaging要设置为jar不能设置为pom<packaging>jar</packaging> <dependency><groupId>org.springframework.boot</groupId><artifactId>spring-boot-starter-web&…
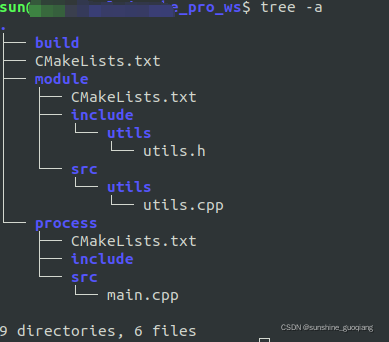
cmake生成so包并调用(C++project,build,cmake)
1. 目录结构 2 . downloads 2.1 build module process CMakeLists.txt > cmake_minimum_required(VERSION 3.5)if(CMAKE_COMPILER_IS_GNUCC)message("COMPILER IS GNUCC")ADD_DEFINITIONS ( -stdc11 ) endif(CMAKE_COMPILER_IS_GNUCC)SET(CMAKE_CXX_FLAGS_DEBU…