基于三维点云数据的主成分分析方法(PCA)的python实现
主成分分析(PCA)获取三维点云的坐标轴方向和点云法向量
# 实现PCA分析和法向量计算,并加载数据集中的文件进行验证import open3d as o3d
# import os
import numpy as np
from scipy.spatial import KDTree# from pyntcloud import PyntCloud# 功能:计算PCA的函数
# 输入:
# data:点云,NX3的矩阵
# correlation:区分np的cov和corrcoef,不输入时默认为False
# sort: 特征值排序,排序是为了其他功能方便使用,不输入时默认为True
# 输出:
# eigenvalues:特征值
# eigenvectors:特征向量
def PCA(data, correlation=False, sort=True):# normalize 归一化mean_data = np.mean(data, axis=0)normal_data = data - mean_data# 计算对称的协方差矩阵H = np.dot(normal_data.T, normal_data)# SVD奇异值分解,得到H矩阵的特征值和特征向量eigenvectors, eigenvalues, _ = np.linalg.svd(H)if sort:sort = eigenvalues.argsort()[::-1]eigenvalues = eigenvalues[sort]eigenvectors = eigenvectors[:, sort]return eigenvalues, eigenvectorsdef main():# 从txt文件获取点,只对点进行处理filename = "D:\pointcloud_processing\modelnet40_normal_resampled\\airplane\\airplane_0001.txt"points = np.loadtxt(filename, delimiter=',')[:, 0:3] # 导入txt数据到np.array,这里只需导入前3列print('total points number is:', points.shape[0])# 用PCA分析点云主方向w, v = PCA(points) # PCA方法得到对应的特征值和特征向量point_cloud_vector = v[:, 0] #点云主方向对应的向量为最大特征值对应的特征向量print('the main orientation of this pointcloud is: ', point_cloud_vector)# 三个特征向量组成了三个坐标轴axis = o3d.geometry.TriangleMesh.create_coordinate_frame().rotate(v, center=(0, 0, 0))# 循环计算每个点的法向量leafsize = 32 # 切换为暴力搜索的最小数量KDTree_radius = 0.1 # 设置邻域半径tree = KDTree(points, leafsize=leafsize) # 构建KDTreeradius_neighbor_idx = tree.query_ball_point(points, KDTree_radius) # 得到每个点的邻近索引normals = [] # 定义一个空list# -------------寻找法线---------------# 首先寻找邻域内的点for i in range(len(radius_neighbor_idx)):neighbor_idx = radius_neighbor_idx[i] # 得到第i个点的邻近点索引,邻近点包括自己neighbor_data = points[neighbor_idx] # 得到邻近点,在求邻近法线时没必要归一化,在PCA函数中归一化就行了eigenvalues, eigenvectors = PCA(neighbor_data) # 对邻近点做PCA,得到特征值和特征向量normals.append(eigenvectors[:, 2]) # 最小特征值对应的方向就是法线方向# ------------法线查找结束---------------normals = np.array(normals, dtype=np.float64) # 把法线放在了normals中# o3d.geometry.PointCloud,返回了PointCloud类型pc_view = o3d.geometry.PointCloud(points=o3d.utility.Vector3dVector(points))# 向PointCloud对象中添加法线pc_view.normals = o3d.utility.Vector3dVector(normals)# 可视化o3d.visualization.draw_geometries([pc_view, axis], point_show_normal=True)if __name__ == '__main__':main()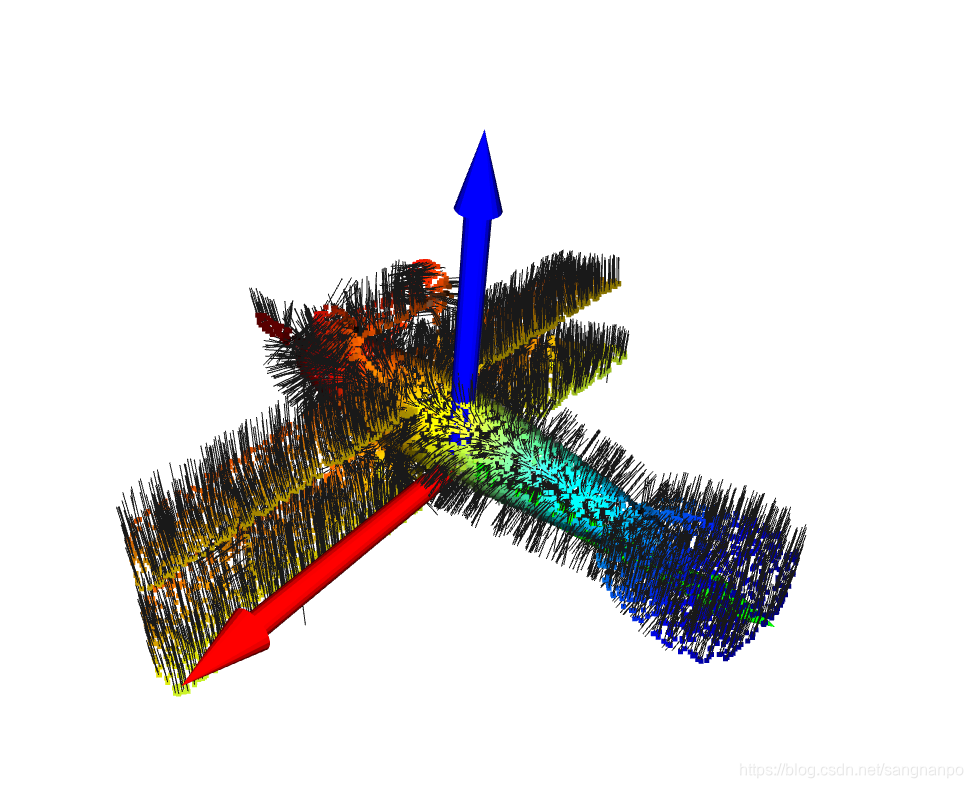
相关文章:
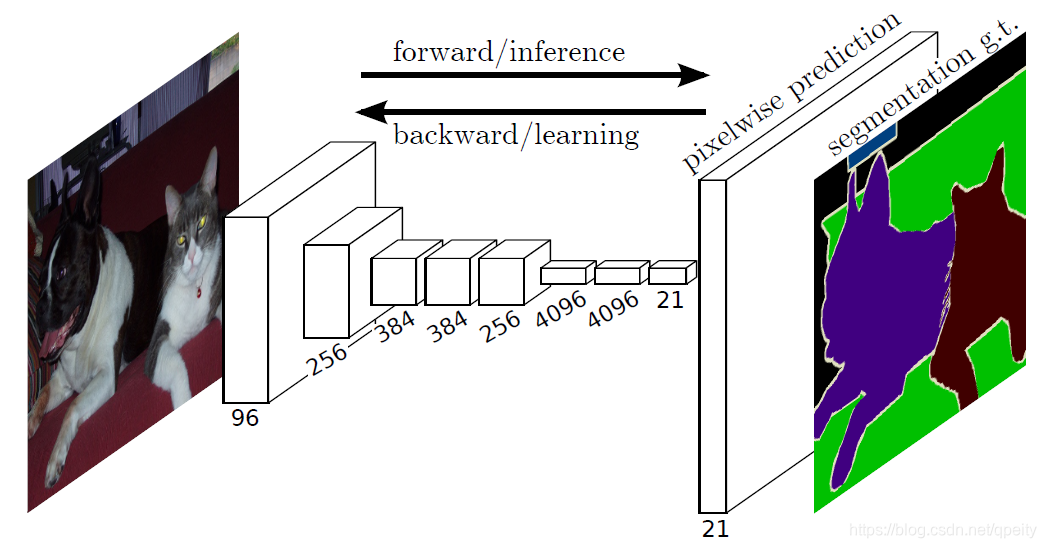
CV02-FCN笔记
目录 一、Convolutionalization 卷积化 二、Upsample 上采样 2.1 Unpool反池化 2.2 Interpolation差值 2.3 Transposed Convolution转置卷积 三、Skip Architecture 3.1 特征融合 3.2 裁剪 FCN原理及实践,记录一些自己认为重要的要点,以免日后遗…

python基础之常用模块
6、TEXT PROCESSING SERVICES :文本处理服务 6.1、re 8、DATA TYPES : 数据类型 8.1、datetime 8.2、collections 8.3、copy 9、 NUMERIC AND MATHEMATICAL MODULES : 数字和数学模块 9.1、random 10、FUNCTIONAL PROGRAMMING MODULES : 函数式编程模块 10.1、iter…
笔记本电脑摄像头实现光流跟踪
看实验室里的师兄在写CSDN,自己也写一个,记录自己的学习进程吧。 研究生从机械转到了毫无基础的SLAM领域。研一半年上课加自学,对SLAM也有一丢丢的了解。最近看光流法时,想到用笔记本电脑的摄像头实现一下,就简单的…
JSON字符串 拼接与解析
常用方式: json字符串拼接(目前使用过两种方式): 1.运用StringBuilder拼接 StringBuilder json new StringBuilder(); json.append("{"); json.append(""uuid":" """ uuid "",&q…
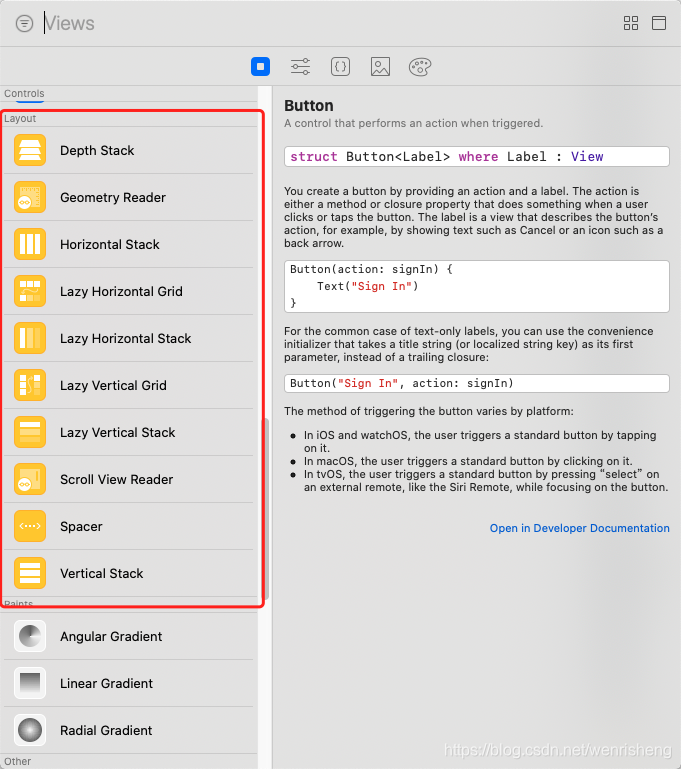
iOS SwiftUI篇-3 排版布局layout
iOS SwiftUI篇-3 排版布局layout swiftUI提供的layout有: ZStack、GeometryReader、HStack、LazyVGrid、LazyHStack、LazyHGrid、LazyVStack、VStack、Spacer、ScrollViewReader等 HStack 水平横向布局容器,子view按顺序水平排列 HStack(alignment: .center, spacing: 10)…
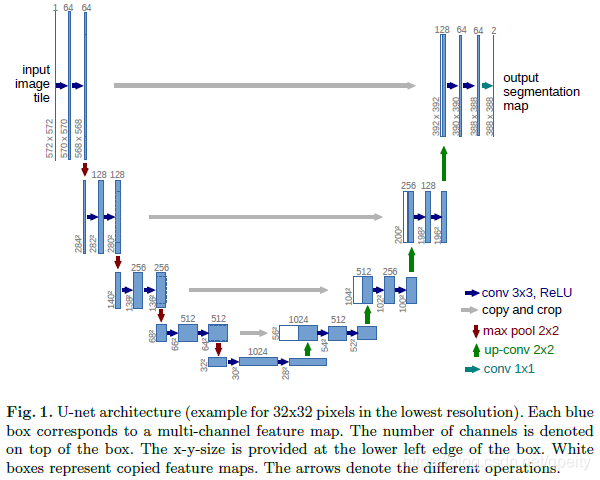
CV04-UNet笔记
目录 一、UNet模型 二、Encoder & Decoder 2.1 Encoder 2.2 Decoder 2.3 classifier 学习U-Net: Convolutional Networks for Biomedical Image Segmentation,记录一些自己认为重要的要点,以免日后遗忘。 代码:https://github.com/…
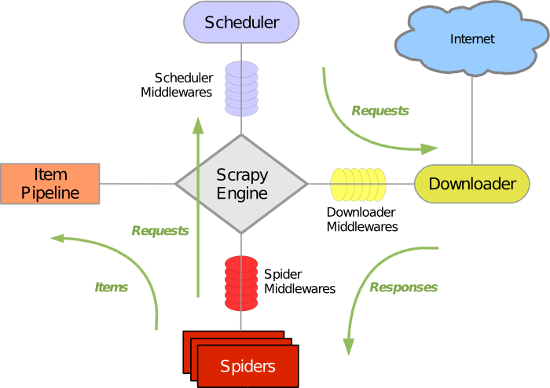
Scrapy 学习笔记(-)
Scrapy Scrapy 是一个为了爬取网站数据,提取结构性数据而编写的应用框架。 其可以应用在数据挖掘,信息处理或存储历史数据等一系列的程序中。其最初是为了页面抓取 (更确切来说, 网络抓取 )所设计的, 也可以应用在获取API所返回的数据(例如 A…
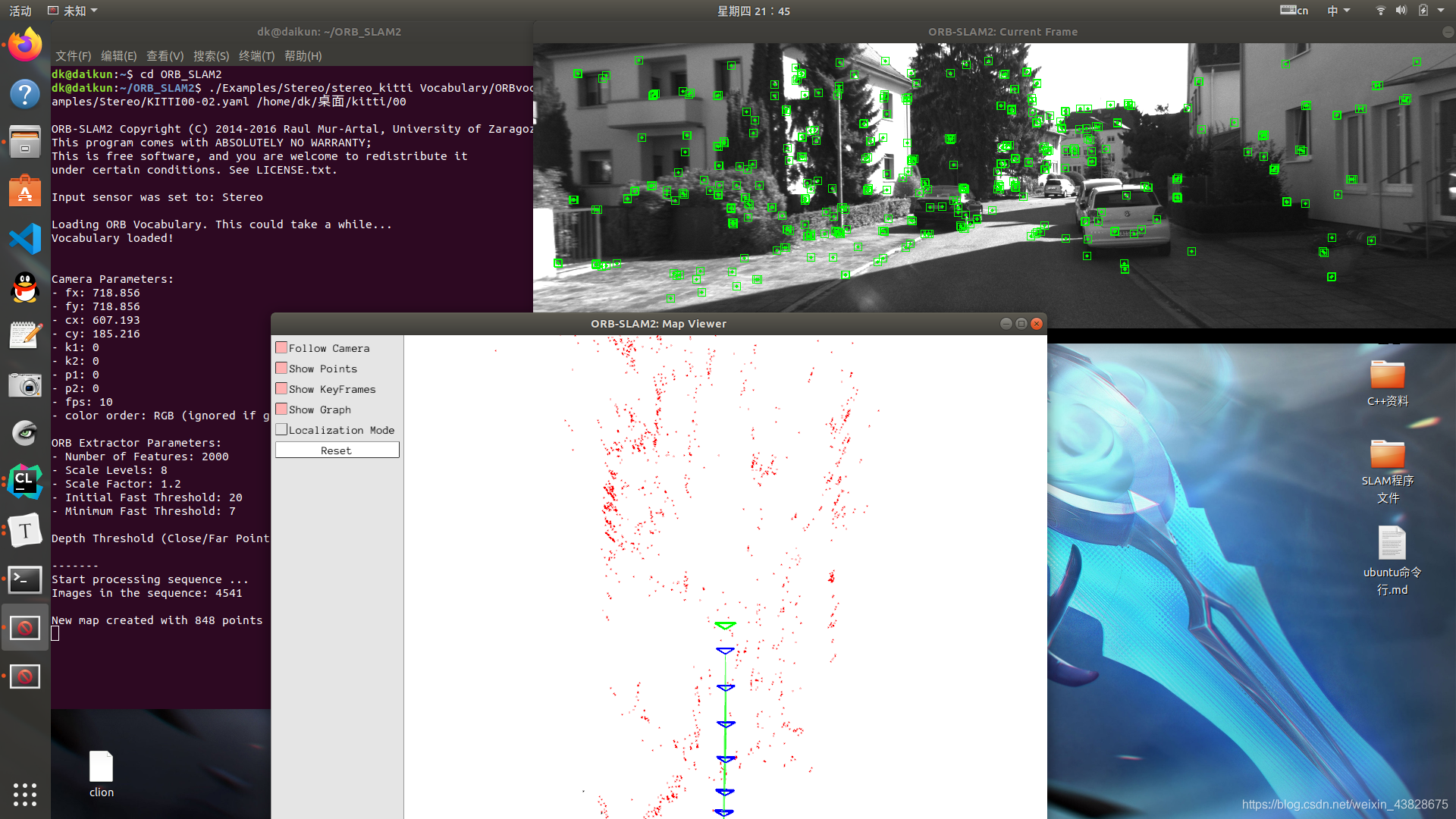
Ubuntu18.04运行ORB_SLAM2
运行环境:Ubuntu18.04 预先安装的库 需要预先安装一些库,如Eign,Sophus,OpenCV等。笔者在阅读《SLAM十四讲》的时候已经安装,在此不再赘述。 ORB_SLAM2源码的下载与编译 git clone https://github.com/raulmur/ORB…
java中的各种流(老师的有道云笔记)
内存操作流-字节之前的文件操作流是以文件的输入输出为主的,当输出的位置变成了内存,那么就称为内存操作流。此时得使用内存流完成内存的输入和输出操作。如果程序运行过程中要产生一些临时文件,可采用虚拟文件方式实现;直接操作磁…
iOS SwiftUI篇-4 注解@State、@Binding、@ObservedObject、@EnvironmentObject、@Environment
iOS SwiftUI篇-4 注解@State、@Binding、@ObservedObject、@EnvironmentObject、@Environment @State 关联View的状态,当@State修饰的属性改变时,对应的View会跟着刷新,符合MVVM的设计理念 @State var count: Int = 0Section(header: Text("@States")) {Te
CV05-ResNet笔记
目录 一、为什么是ResNet 二、Residual Learning细节 2.1 shortcut计算 2.2 11卷积调整channel维度大小 2.3 ResNet层数 2.4 ResNet里的Basic Block 和 Bottleneck Block 2.5 Global Average Pooling 全局平均池化 2.6 Batch Normalization 学习ResNet,记录…
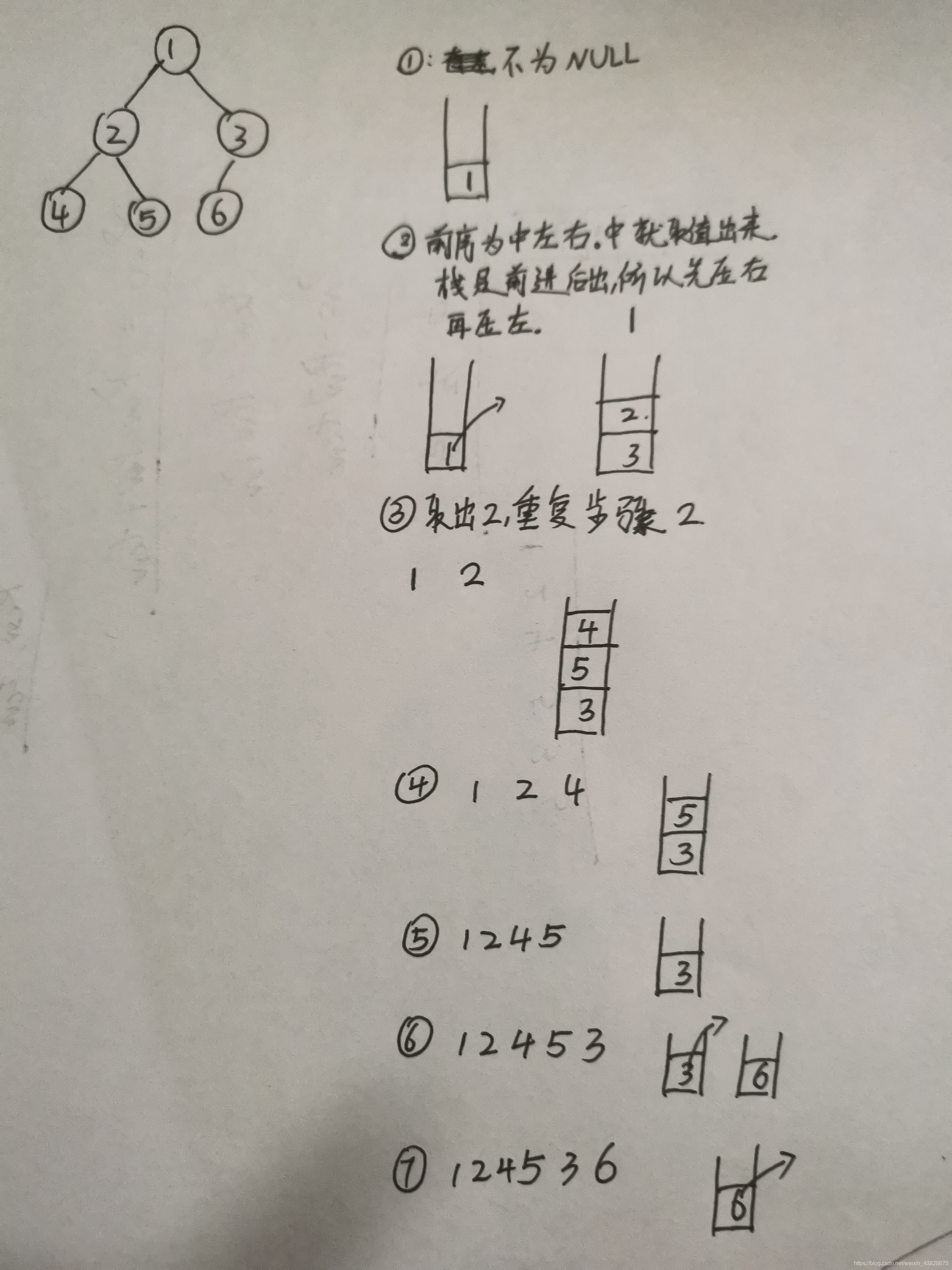
二叉树的前序,中序,后序的递归、迭代实现
二叉树的前序遍历 递归实现 递归实现没什么好说的。个人感觉将函数功能看成一个整体,不要去想栈中怎么实现的。毕竟自己的脑袋不是电脑,绕着绕着就蒙了。 void preordered_traversal_recursion(TreeNode* root) {if(root NULL) return;container.pus…
DataSet 动态添加列
public DataSet GetNewId(List<string> IdArr){DataSet ds new DataSet();DataTable newtb new DataTable();DataColumn column new DataColumn("cnt", typeof(string));//新增列newtb.Columns.Add(column);for (int i 0; i < IdArr.Count; i){StringBu…
iOS专题1-蓝牙扫描、连接、读写
iOS专题1-蓝牙扫描、连接、读写 概念 外围设备 可以被其他蓝牙设备连接的外部蓝牙设备,不断广播自身的蓝牙名及其数据,如小米手环、共享单车、蓝牙体重秤 中央设备 可以搜索并连接周边的外围设备,并与之进行数据读写通讯,如手机 日常生活中常见的场景是手机app通过蓝…
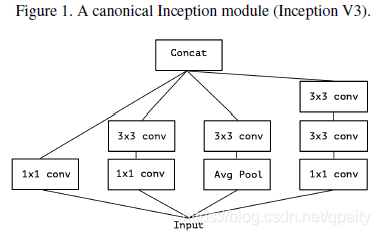
CV06-Xception笔记
目录 一、为啥是Xception 二、Xception结构 2.1 Xception结构基本描述 2.2 实现细节 2.3 DeepLabV3改进 三、记录pytorch采坑relu激活函数inplaceTrue Xception笔记,记录一些自己认为重要的要点,以免日后遗忘。 复现Xception论文、DeepLabV改进的…
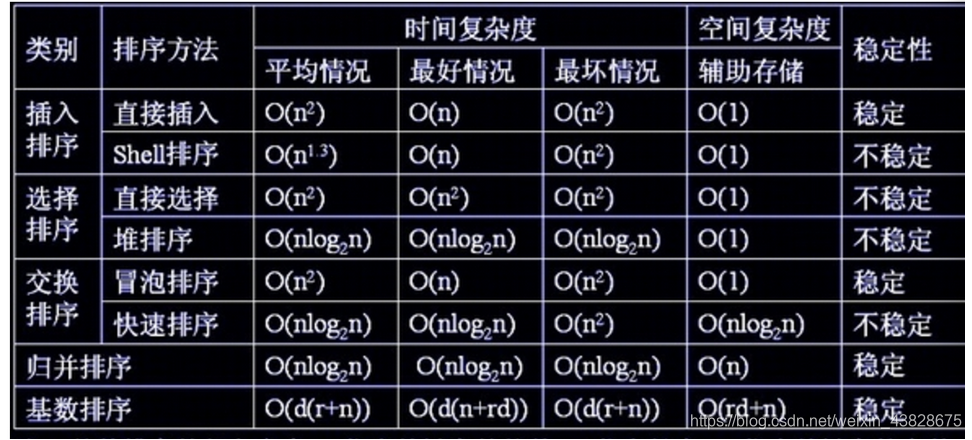
C++排序算法实现(更新中)
比较排序法:如冒泡排序、简单选择排序、合并排序、快速排序。其最优的时间复杂度为O(nlogn)。 其他排序法:如桶排序、基数排序等。时间复杂度可以达到O(n)。但试用范围有要求。 桶排序:排序的数组元素跨距不能很大。因为跨距很大的话…
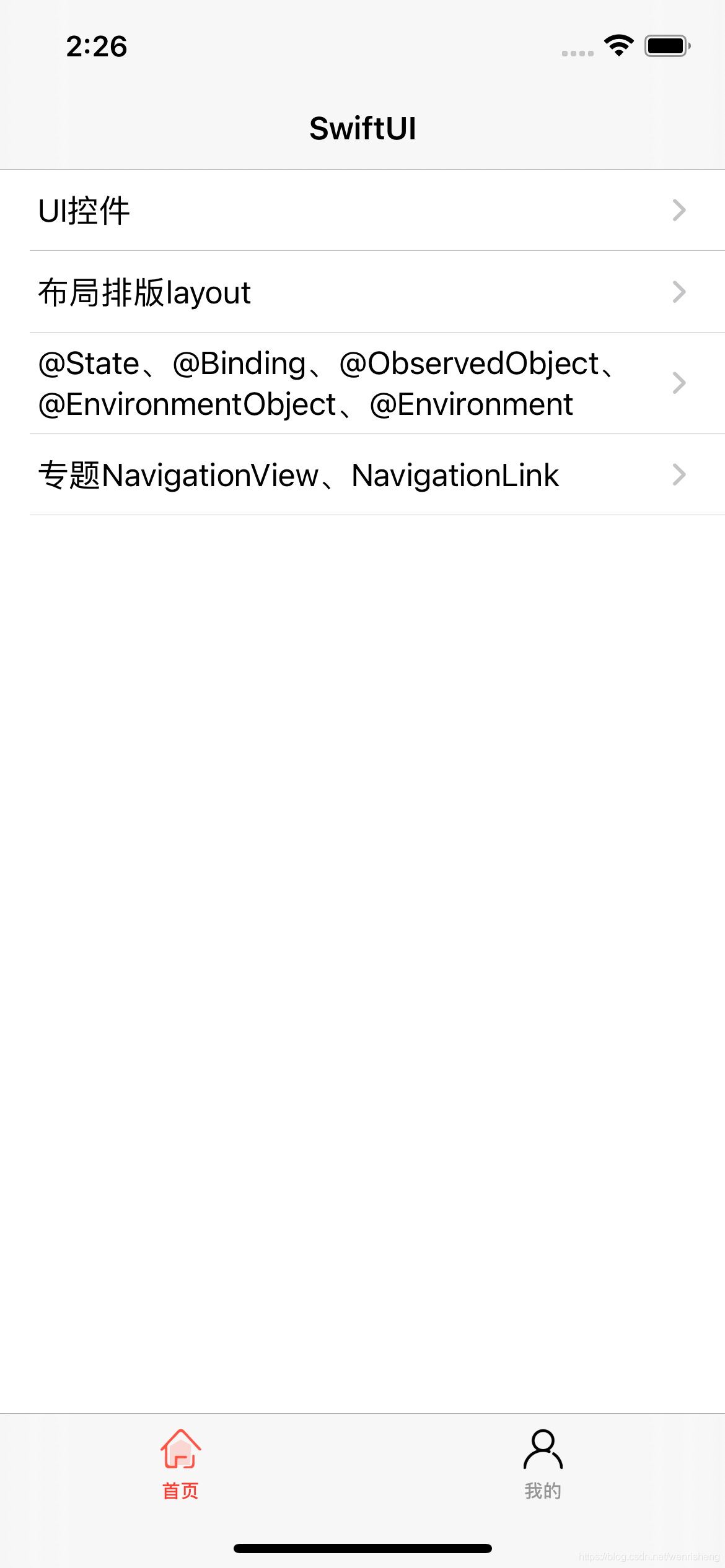
iOS SwiftUI篇-5 专题NavigationView、NavigationLink
iOS SwiftUI篇-5 专题NavigationView、NavigationLink NavigationView:标题、展示模式、隐藏导航栏、隐藏返回按钮、添加导航栏按钮 NavigationLink:Text文本跳转、Image图片跳转、Button按钮跳转、点击按钮根据业务跳转到不同页面 NavigationView 标题、展示模式 import S…
PHP artisan
Artisan 是 Laravel 提供的 CLI(命令行接口),它提供了非常多实用的命令来帮助我们开发 Laravel 应用。前面我们已使用过 Artisan 命令来生成应用的 App Key 和控制器。在本教程中,我们会用到以下 Artisan 命令,你也可以…
【转载】Pytorch在加载模型参数时指定设备
转载 https://sparkydogx.github.io/2018/09/26/pytorch-state-dict-gpu-to-cpu/ >>> torch.load(tensors.pt) # Load all tensors onto the CPU >>> torch.load(tensors.pt, map_locationtorch.device(cpu)) # Load all tensors onto the CPU, using a fun…

目标检测之Faster-RCNN的pytorch代码详解(数据预处理篇)
首先贴上代码原作者的github:https://github.com/chenyuntc/simple-faster-rcnn-pytorch(非代码作者,博文只解释代码) 今天看完了simple-faster-rcnn-pytorch-master代码的最后一个train.py文件,是时候认真的总结一下了࿰…
hp-ux 集群,内存 小记
hp-ux 集群,内存 小记 -----查看hp 集群状态信息 # cmviewcl -v CLUSTER STATUS dbsvr up NODE STATUS STATE db01 up running Cluster_Lock_LVM: VOLUM…
iOS SwiftUI篇-6 专题TabView
iOS SwiftUI篇-6 专题TabView TabView: 图片+文字组成tabItem,选中时改变图片和文字颜色 跳转到二级页面时隐藏tabbar,返回到首页时显示tabbar 首页、我的两个tab,效果图: 图片文字组成tabItem,选中时改变图片和文字颜色 代码: struct MainContentView: View {@State…
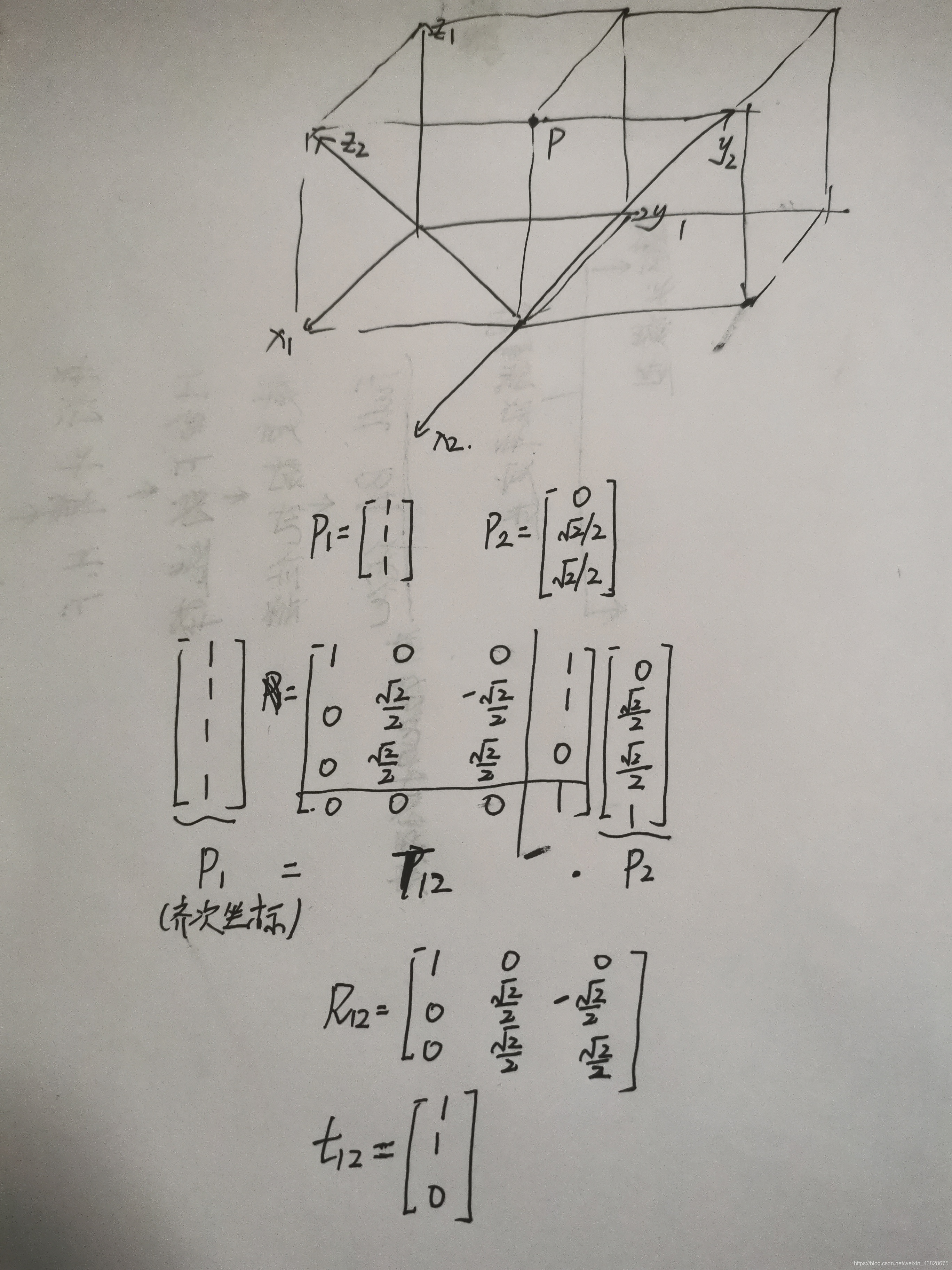
三维刚体变化中Rcw,tcw的含义
高翔博士的《视觉SLAM十四讲》中,介绍Tcw指从世界坐标w到c的变换矩阵。但研一学机器人学的时候,讲T12的含义是,坐标系2相对于坐标系1的变换。于是一脸懵逼。昨天想了一晚上,有了一点自己的想法,在这记录一下࿰…
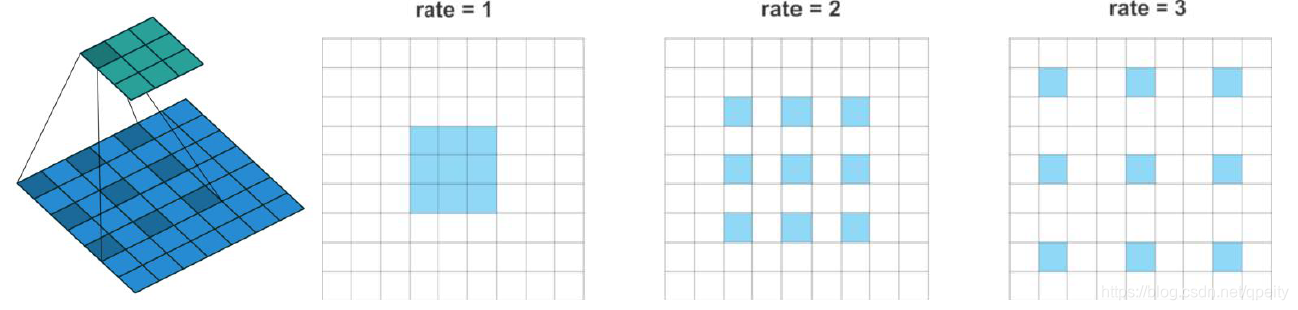
CV07-DeepLab v3+笔记
目录 一、Dilated Convolution 膨胀卷积 二、ASPP与Encoder & Decoder 三、深度可分离卷积 3.1 深度可分离卷积原理 3.2 深度可分离卷积减小参数量和计算量 3.3 深度可分离卷积实现细节 四、Xception作为Backbone DeepLab v3笔记,记录一些自己认为重要的…
1116.加减乘除
题目描述:根据输入的运算符对输入的整数进行简单的整数运算。 运算符只会是加、减-、乘*、除/、求余%、阶乘!六个运算符之一。 输出运算的结果,如果出现除数为零,则输出“error”,如果求余运算的第二个运算数为0,也输出…
Flutter专题1-环境搭建
Flutter专题1-环境搭建和创建项目 这里以MaciOS为例,其他平台参考官网https://flutter.dev/docs/get-started/install 1. 系统要求 系统:macOS (64-bit) 硬盘空间:2.8G 工具:Git 2.获取Flutter SDK 2.1下载SDK,从https://flutter.dev/docs/development/tools/s…
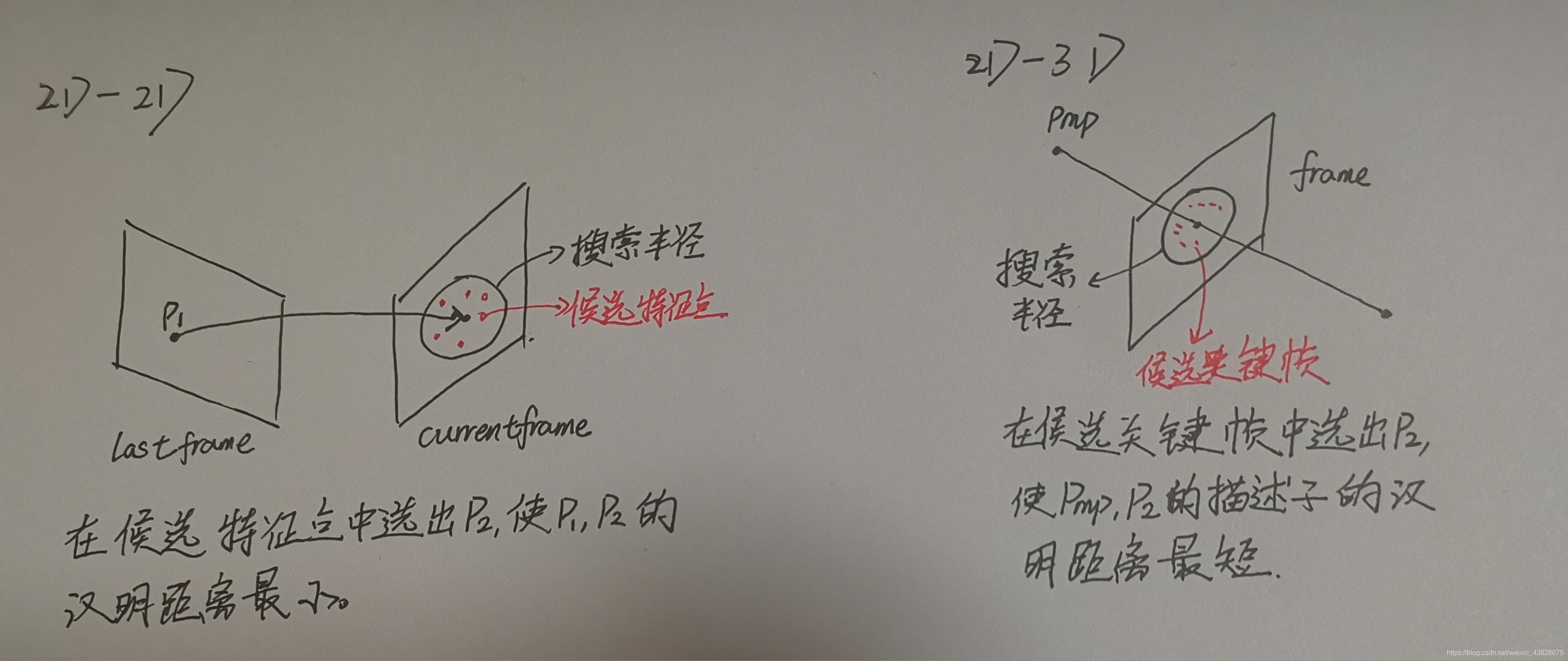
ORB_SLAM2源码:ORBmatcher.cc
ORBmatcher.cc中的函数,主要实现(1)路标点和特征点的匹配(2D-3D点对)。(2)特征点和特征点的匹配(2D-2D点对)。SearchByProjection的函数重载看得我一脸懵逼。在这做一下笔…
iOS国际化技巧
参考链接:http://www.cocoachina.com/ios/20151120/14258.html http://www.jianshu.com/p/88c1b65e3ddb http://www.cnblogs.com/levilinxi/p/4296712.html http://www.cocoachina.com/appstore/20160310/15632.html http://www.cocoachina.com/ios/20170214/18681.html转载于:…
CV08-数据预处理与数据增强
复现车道线分割项目(Lane Segmentation赛事说明在这里),学习数据预处理和数据增强。学习分为Model、Data、Training、Inference、Deployment五个阶段,也就是建模、数据、训练、推断、部署这五个阶段。现在进入的是Data阶段。项目的…
ORB_SLAM2程序入口(System.cc)
程序入口 ORB_SLAM2的程序入口为src/System.cc。在CMakeList.txt中可知,ORB_SLAM2的可执行程序为: Examples/Stereo/stereo_kitti.cc等。 add_executable(stereo_kitti Examples/Stereo/stereo_kitti.cc) target_link_libraries(stereo_kitti ${PROJECT…