首先贴上代码原作者的github:https://github.com/chenyuntc/simple-faster-rcnn-pytorch(非代码作者,博文只解释代码)
今天看完了simple-faster-rcnn-pytorch-master代码的最后一个train.py文件,是时候认真的总结一下了,我打算一共总结四篇博客用来详细的分析Faster-RCNN的代码的pytorch实现, 四篇博客的内容及目录结构如下:
1 Faster-RCNN的数据读取及预处理部分:(对应于代码的/simple-faster-rcnn-pytorch-master/data文件夹):https://www.cnblogs.com/kerwins-AC/p/9734381.html
2 Faster-RCNN的模型准备部分:(对应于代码目录/simple-faster-rcnn-pytorch-master/model/utils/文件夹):https://www.cnblogs.com/kerwins-AC/p/9752679.html
3 Faster-RCNN的模型正式介绍:(对应于代码目录/simple-faster-rcnn-pytorch-master/model/文件夹): 尚未完成
4 Faster-RCNN的训练代码部分:(对应于代码目录/simple-faster-rcnn-pytorch-master/train.py,trainer.py代码):https://www.cnblogs.com/kerwins-AC/p/9728731.html
本篇博客主要介绍代码的数据预处理部分的内容,对应于以下几个文件:

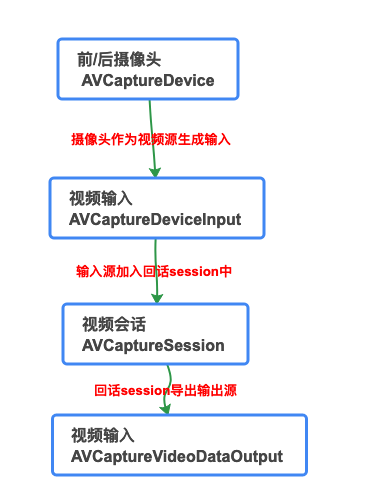
首先是dataset.py文件,我们用函数流程图看一下它的结构:

然后老规矩一个函数一个函数的分析它的内容和功能!
1 def inverse_normalize(img)函数代码如下:


1 def inverse_normalize(img): 2 if opt.caffe_pretrain: 3 img = img + (np.array([122.7717, 115.9465, 102.9801]).reshape(3, 1, 1)) 4 return img[::-1, :, :] 5 # approximate un-normalize for visualize 6 return (img * 0.225 + 0.45).clip(min=0, max=1) * 255
函数首先读取opt.caffe_pretrain判断是否使用caffe_pretrain进行预训练如果是的话,对图片进行逆正则化处理,就是将图片处理成caffe模型需要的格式
2 def pytorch_normalize(img) 函数代码如下:
1 def pytorch_normalze(img): 2 """ 3 https://github.com/pytorch/vision/issues/223 4 return appr -1~1 RGB 5 """ 6 normalize = tvtsf.Normalize(mean=[0.485, 0.456, 0.406], 7 std=[0.229, 0.224, 0.225]) 8 img = normalize(t.from_numpy(img)) 9 return img.numpy()
函数首先设置归一化参数normalize=tvtsf.Normalize(mean=[0.485,0.456,0.406],std=[0.229,0.224,0.225]) 然后对图片进行归一化处理img=normalize(t.from_numpy(img))
3 def caffe_normalize(img)函数代码如下:
1 def caffe_normalize(img): 2 """ 3 return appr -125-125 BGR 4 """ 5 img = img[[2, 1, 0], :, :] # RGB-BGR 6 img = img * 255 7 mean = np.array([122.7717, 115.9465, 102.9801]).reshape(3, 1, 1) 8 img = (img - mean).astype(np.float32, copy=True) 9 return img
caffe的图片格式是BGR,所以需要img[[2,1,0],:,:]将RGB转换成BGR的格式,然后图片img = img*255 , mean = np.array([122.7717,115.9465,102.9801]).reshape(3,1,1)设置图片均值
然后用图片减去均值完成caffe形式的归一化处理
4 def preprocess(img, min_size=600, max_size=1000)函数代码如下:
1 def preprocess(img, min_size=600, max_size=1000): 2 """Preprocess an image for feature extraction. 3 4 The length of the shorter edge is scaled to :obj:`self.min_size`. 5 After the scaling, if the length of the longer edge is longer than 6 :param min_size: 7 :obj:`self.max_size`, the image is scaled to fit the longer edge 8 to :obj:`self.max_size`. 9 10 After resizing the image, the image is subtracted by a mean image value 11 :obj:`self.mean`. 12 13 Args: 14 img (~numpy.ndarray): An image. This is in CHW and RGB format. 15 The range of its value is :math:`[0, 255]`. 16 17 Returns: 18 ~numpy.ndarray: A preprocessed image. 19 20 """ 21 C, H, W = img.shape 22 scale1 = min_size / min(H, W) 23 scale2 = max_size / max(H, W) 24 scale = min(scale1, scale2) 25 img = img / 255. 26 img = sktsf.resize(img, (C, H * scale, W * scale), mode='reflect',anti_aliasing=False) 27 # both the longer and shorter should be less than 28 # max_size and min_size 29 if opt.caffe_pretrain: 30 normalize = caffe_normalize 31 else: 32 normalize = pytorch_normalze 33 return normalize(img)
图片处理函数,C,H,W = img.shape 读取图片格式通道,高度,宽度
Scale1 = min_size/min(H,W)
Scale2 = max_size / max(H,W)
Scale = min(scale1,scale2)设置放缩比,这个过程很直觉,选小的方便大的和小的都能够放缩到合适的位置
img = img/ 255
img = sktsf.resize(img,(C,H*scale,W*scale),model='reflecct')将图片调整到合适的大小位于(min_size,max_size)之间、
然后根据opt.caffe_pretrain是否存在选择调用前面的pytorch正则化还是caffe_pretrain正则化
5 class Transform(object):代码如下
1 class Transform(object): 2 3 def __init__(self, min_size=600, max_size=1000): 4 self.min_size = min_size 5 self.max_size = max_size 6 7 def __call__(self, in_data): 8 img, bbox, label = in_data 9 _, H, W = img.shape 10 img = preprocess(img, self.min_size, self.max_size) 11 _, o_H, o_W = img.shape 12 scale = o_H / H 13 bbox = util.resize_bbox(bbox, (H, W), (o_H, o_W)) 14 15 # horizontally flip 16 img, params = util.random_flip( 17 img, x_random=True, return_param=True) 18 bbox = util.flip_bbox( 19 bbox, (o_H, o_W), x_flip=params['x_flip']) 20 21 return img, bbox, label, scale
__init__函数设置了图片的最小最大尺寸,本pytorch代码中min_size=600,max_size=1000
__call__函数中 从in_data中读取 img,bbox,label 图片,bboxes的框框和label
然后从_,H,W = img.shape读取出图片的长和宽
img = preposses(img,self.min_size,self.max_size)将图片进行最小最大化放缩然后进行归一化
_,o_H,o_W = img.shape 读取放缩后图片的shape
scale = o_H/H 放缩前后相除,得出放缩比因子
bbox = util.reszie_bbox(bbox,(H,W),(o_H,o_W)) 重新调整bboxes框的大小
img,params = utils.random_flip(img.x_random =True,return_param=True)进行图片的随机反转,图片旋转不变性,增强网络的鲁棒性!
同样的对bboxes进行随机反转,最后返回img,bbox,label,scale
6 class Dataset 代码如下
1 class Dataset: 2 def __init__(self, opt): 3 self.opt = opt 4 self.db = VOCBboxDataset(opt.voc_data_dir) 5 self.tsf = Transform(opt.min_size, opt.max_size) 6 7 def __getitem__(self, idx): 8 ori_img, bbox, label, difficult = self.db.get_example(idx) 9 10 img, bbox, label, scale = self.tsf((ori_img, bbox, label)) 11 # TODO: check whose stride is negative to fix this instead copy all 12 # some of the strides of a given numpy array are negative. 13 return img.copy(), bbox.copy(), label.copy(), scale 14 15 def __len__(self): 16 return len(self.db)
__init__初始化设置self.opt =opt ,self.db = VOCBboxDataset(opt.voc_data_dir)以及self.tsf = Transform(opt.min_size,opt.max_size)
—getitem__可以简单的理解为从数据集存储路径中将例子一个个的获取出来,然后调用前面的Transform函数将图片,label进行最小值最大值放缩归一化,重新调整bboxes的大小,然后随机反转,最后将数据集返回!
7 class TestDataset 代码如下
1 class TestDataset: 2 def __init__(self, opt, split='test', use_difficult=True): 3 self.opt = opt 4 self.db = VOCBboxDataset(opt.voc_data_dir, split=split, use_difficult=use_difficult) 5 6 def __getitem__(self, idx): 7 ori_img, bbox, label, difficult = self.db.get_example(idx) 8 img = preprocess(ori_img) 9 return img, ori_img.shape[1:], bbox, label, difficult 10 11 def __len__(self): 12 return len(self.db)
TestData完成的功能和前面类似,但是获取调用的数据集是不同的,因为def __init__(self,opt,split='test',use_difficult=True)可以看到它在从Voc_data_dir中获取数据的时候使用了split='test'也就是从test往后分割的部分数据送入到TestDataset的self.db中,然后在进行图片处理的时候,并没有调用transform函数,因为测试图片集没有bboxes需要考虑,同时测试图片集也不需要随机反转,反转无疑为测试准确率设置了阻碍!所以直接调用preposses()函数进行最大值最小值裁剪然后归一化就完成了测试数据集的处理!最后将整个self.db返回,至此,dataset.py介绍完毕