OpenAI机械手单手轻松解魔方,背靠强化学习+新技术ADR

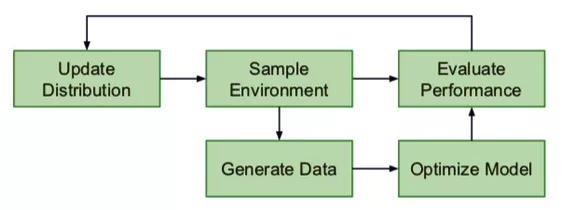
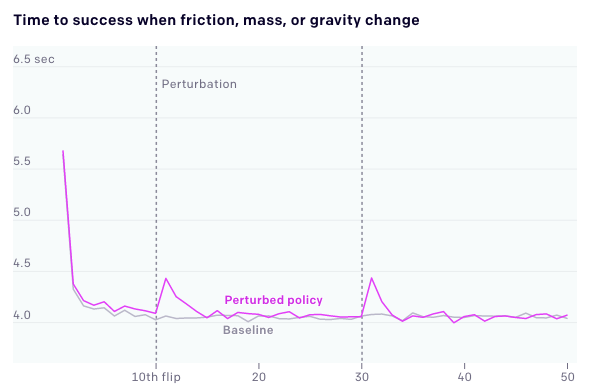
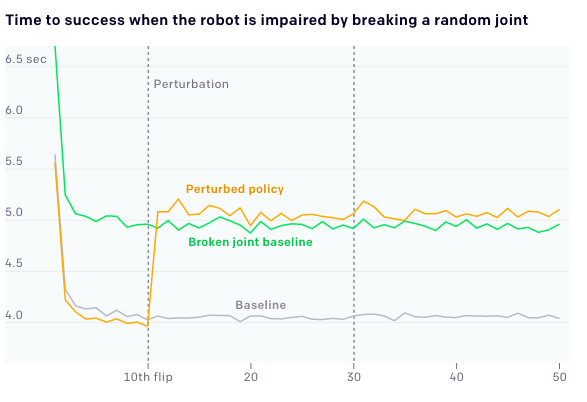
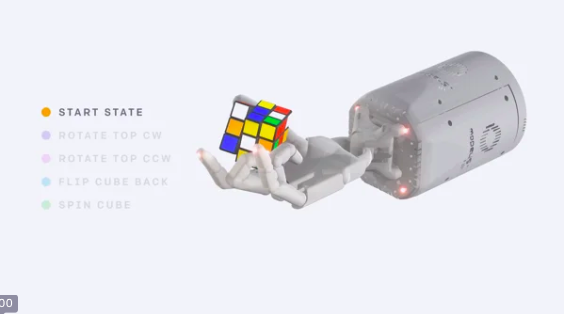
【导读】10月15日,人工智能研究机构OpenAI发布了一条机械手单手解魔方的视频。这个自学式的类人机器人手臂名为 Dactyl,不仅可以单手解魔方,甚至能在外加各种干扰,比如“蒙眼”,用布娃娃长颈鹿干扰下继续完成任务。这次,这套机械手系统使用的是此前用于 OpenFive 同样的强化学习代码,加上一项名为 Automatic Domain Randomization (ADR,自动化域随机)的新技术,这套系统可以处理之前未见过的场景,再次证明了强化学习的强大学习能力。
 机械手被布娃娃干扰
机械手被布娃娃干扰 用笔戳魔方
用笔戳魔方 食指和中指被绑住
食指和中指被绑住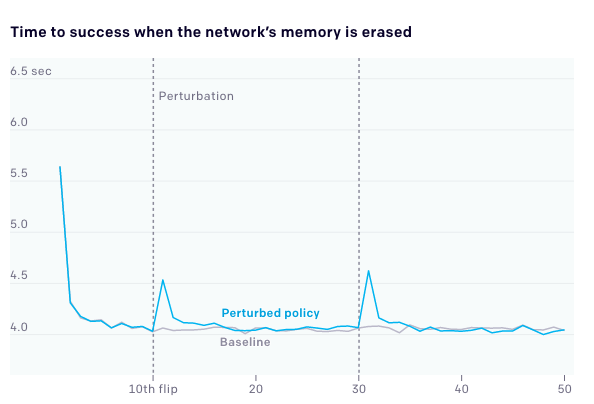
◆
精彩推荐
◆

推荐阅读
大规模1.4亿中文知识图谱数据,我把它开源了
快速适应性很重要,但不是元学习的全部目标
太鸡冻了!我用Python偷偷查到暗恋女生的名字
刷爆了!GitHub标星1.6W,这个Python项目太实用!
巨头垂涎却不能染指,loT 数据库风口已至
【建议收藏】数据中心服务器基础知识大全
从4个维度深度剖析闪电网络现状,在CKB上实现闪电网络的理由 | 博文精选
2019 年诺贝尔物理学奖揭晓!三得主让宇宙“彻底改观”
不服!身边程序员同事竟说自己敲代码速度快!Ctrl+C、Ctrl+V ?

你点的每个“在看”,我都认真当成了AI
相关文章:
AMD and CMD are dead之js模块化黑魔法
缘由 在2013-03-06 13:58的时候,曾甩下一片文章叫:《为什么不使用requirejs和seajs》,并放下豪言说发布一款完美的模块化库,再后来就把那篇文章删了,再然后就没有然后。该用seajs还用seajs,甚至我码的SCJ都…

一文了解Python常见的序列化操作
关于我 编程界的一名小小程序猿,目前在一个创业团队任team lead,技术栈涉及Android、Python、Java和Go,这个也是我们团队的主要技术栈。 联系:hylinux1024gmail.com 0x00 marshal marshal使用的是与Python语言相关但与机器无关的二…
TEE(Trusted Execution Environment)简介
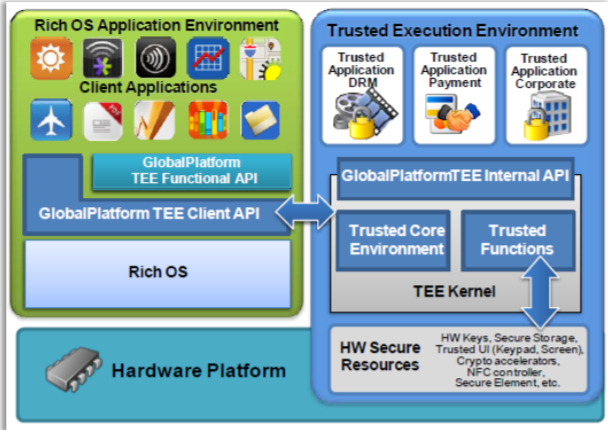
TEE(Trusted Execution Environment),可信执行环境,该环境可以保证不被常规操作系统干扰的计算,因此称为”可信”。这是通过创建一个可以在TrustZone的”安全世界”中独立运行的小型操作系统实现的,该操作系统以系统调用(由TrustZ…
自动驾驶关键环节:行人的行为意图建模和预测(上)
作者 | 黄浴出品 | AI科技大本营(ID:rgznai100)【导读】介绍一下最近行人行为意图建模和预测的研究工作,还是分上下两部分,本文为上半部分。Social LSTM: Human Trajectory Prediction in Crowded Spaces比较早的是斯坦福大学 201…

自定义windows下自动清除文件夹或者文件的只读属性的脚本
脚本内容入下:其中脚本中 ”/d"作用 (可以用来改变当前驱动器目录)例如: 我现在是在D盘,现在我要切换到C:\windows目录 脚本参数中 ATTRIB -R /S /D 解释内容如下:(上述脚本参数中的 cd …
C++11容器中新增加的emplace相关函数的使用
C11中,针对顺序容器(如vector、deque、list),新标准引入了三个新成员:emplace_front、emplace和emplace_back,这些操作构造而不是拷贝元素。这些操作分别对应push_front、insert和push_back,允许我们将元素放置在容器头…

Silverlight+WCF 新手实例 象棋 主界面-棋谱-获取列表(三十八)
2019独角兽企业重金招聘Python工程师标准>>> 在线演示地址:SilverlightWCF 新手实例 象棋 在线演示 在SilverlightWCF 新手实例 象棋 主界面-棋谱-布局写谱(三十六)中,我们完成下棋双方的棋谱显示,这节,我们为观众增加…
确认!语音识别大牛Daniel Povey将入职小米,曾遭霍普金斯大学解雇,怒拒Facebook
整理 | 夕颜 出品 | AI科技大本营(ID:rgznai100) 【导读】10 月 17 日,语音界传奇 Daniel Povey 发布推特,宣布自己 2019 年末将要入职小米,目前正在签订合同阶段,入职后,他将带领一支团队研发…
软链接与硬链接
$ ln f1 f2 #创建f1的一个硬连接文件f2$ ln -s f1 f3 #创建f1的一个符号连接文件f3$ ls -li # -i参数显示文件的inode节点信息转载于:https://www.cnblogs.com/zhizouxiao/p/3794668.html
一文读懂Python复杂网络分析库networkx | CSDN博文精选
作者 | yyl424525来源 | CSDN博客文章目录1. 简介安装支持四种图绘制网络图基本流程2. Graph-无向图节点边属性有向图和无向图互转3. DiGraph-有向图一些精美的图例子环形树状图权重图Giant ComponentRandom Geometric Graph 随机几何图节点颜色渐变边的颜色渐变Atlas画个五角星…
C++11多线程中std::call_once的使用
C11中的std::call_once函数位于<mutex>头文件中。在多线程编程中,有时某个任务只需要执行一次,此时可以用C11中的std::call_once函数配合std::once_flag来实现。如果多个线程需要同时调用某个函数,std::call_once可以保证多个线程对该函…
Solaris 上网配置
2019独角兽企业重金招聘Python工程师标准>>> 早上装solaris10系统的时候,没选默认,选了desk-session模式安装。全英文无界面安装,中间还跑出几个乱码。 靠着随便选随便F2,终于安装完了。 就在那设完分辨率后࿰…
Configure,Makefile.am, Makefile.in, Makefile文件之间关系
为什么80%的码农都做不了架构师?>>> 1.autoscan (autoconf): 扫描源代码以搜寻普通的可移植性问题,比如检查编译器,库,头文件等,生成文件configure.scan,它是configure.ac的一个雏形。 your source files…

这款耳机一点不输千元级的AirPods
你如果问我:生活中你觉得必不可少的一件电子产品是什么?那么我会毫不犹豫的回答你:是耳机!出门忘带耳机是绝对不能忍听不听没关系,但是有它比较安心我觉得生活中不仅是我很多人都对耳机有一种依赖因为很多人都喜欢音乐…

CUDA Samples: Image Process: BGR to Gray
在图像处理中,颜色变换BGR到Gray,常见的一般有两种计算方式,一种是基于浮点数计算,一种是基于性能优化的通过移位的整数计算。浮点数计算公式为: gray 0.1140 * B 0.5870 * G 0.2989 * R;整数计算公式为࿱…
CYQ.Data 数据框架系列索引
2019独角兽企业重金招聘Python工程师标准>>> 索引基础导航: 1:下载地址:http://www.cyqdata.com/download/article-detail-426 2:入门教程:http://www.cyqdata.com/cyqdata/article-cate-33 3:购…
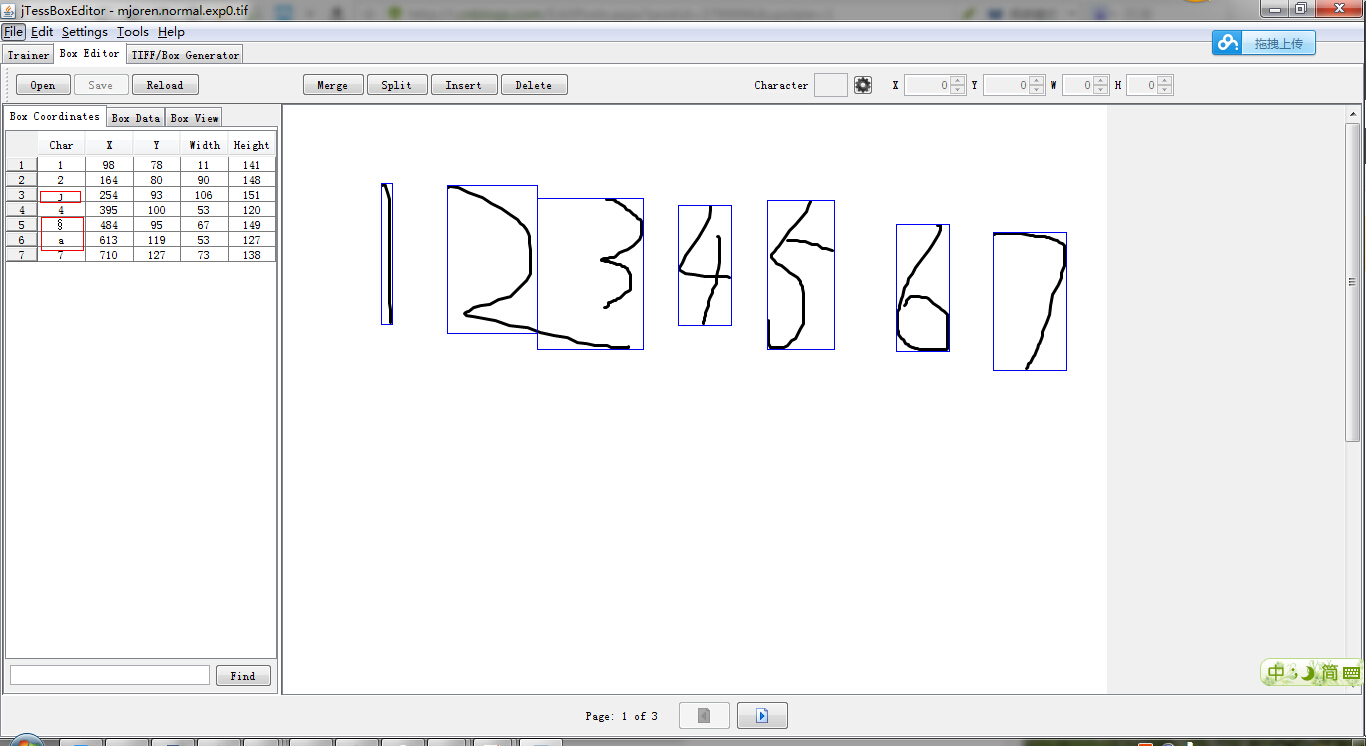
Tesseract 3 语言数据的训练方法
OCR,光学字符识别 光学字符识别(OCR,Optical Character Recognition)是指对文本资料进行扫描,然后对图像文件进行分析处理,获取文字及版面信息的过程。OCR技术非常专业,一般多是印刷、打印行业的从业人员使用,可以快速的将纸质资料…
Windows C++中__declspec(dllexport)的使用
__declspec是Microsoft VC中专用的关键字,它配合着一些属性可以对标准C/C进行扩充。__declspec关键字应该出现在声明的前面。 __declspec(dllexport)用于Windows中的动态库中,声明导出函数、类、对象等供外面调用,省略给出.def文件。即将函数…
图灵奖得主LeCun力推无监督学习:要重视基于能量的学习方法
作者 | Tiernan Ray译者 | 夕颜出品 | AI科技大本营(ID:rgznai100)导语:图灵奖得主深度学习大牛 Yann LeCun 表示,人工智能的下一个发展方向可能是放弃深度学习的所有概率技巧,转而掌握一系列转移能量值的方法。据说&a…
html5小游戏Untangle
2019独角兽企业重金招聘Python工程师标准>>> 今天介绍一个HTML5的小游戏,让大家体验到HTML5带来的乐趣。这个小游戏很简单,只要用鼠标拖动 蓝点,让图上的所有线都不相交,游戏时间就会停止,是动用大家头脑的…

【VMCloud云平台】SCCM(四)域内推送代理
继上一篇云平台完成SCCM部署篇之后,SCCM篇正式开始,今天将开始介绍SCCM为域内机器推送代理(紫色为完成实施,红色为实施中): 1、 点击站点: 2、 右键属性,点击客户端安装设置&#…
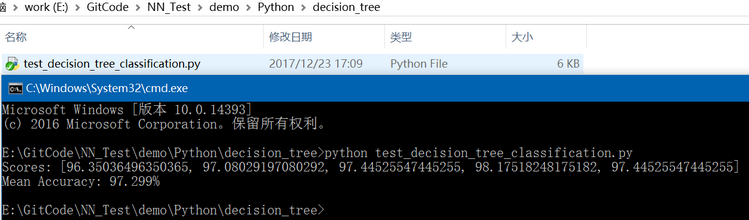
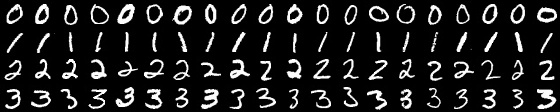
Python实现决策树(Decision Tree)分类
关于决策树的简介可以参考: http://blog.csdn.net/fengbingchun/article/details/78880934在 https://machinelearningmastery.com/implement-decision-tree-algorithm-scratch-python/ 中给出了CART(Classification and Regression Trees,分类回归树算法,简称CART…

顶尖技术专家严选,15场前沿论坛思辨,2019中国大数据技术大会邀您共赴
扫码了解2019中国大数据技术大会(https://t.csdnimg.cn/IaHb)更多详情。2019中国大数据技术大会(BDTC 2019)将于12月5日-7日在北京长城饭店举办,本届大会将聚焦智能时代,大数据技术的发展曲线以及大数据与社…
jQuery 加法计算 使用+号即强转类型
1 var value1 $("#txt1").val(); 2 var value2 $("#txt2").val(); 3 //数值前添加号 number加号和数值加号需要用空格隔开 即实现加法运算 4 $("#txt3").val(value1 value2); 转载于:https://www.cnblogs.com/xiemin-minmin/p/11026784.…
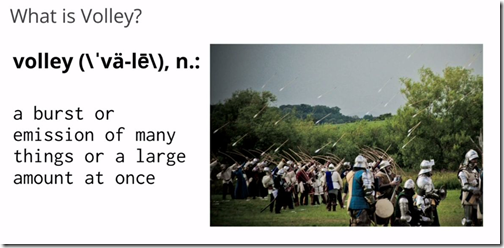
Android Volley 库通过网络获取 JSON 数据
本文内容 什么是 Volley 库 Volley 能做什么 Volley 架构 环境 演示 Volley 库通过网络获取 JSON 数据 参考资料 Android 关于网络操作一般都会介绍 HttpClient 以及 HttpConnection 这两个包。前者是 Apache 开源库,后者是 Android 自带 API。企业级应用࿰…
哪些开发问题最让程序员“头秃”?我们分析了Stack Overflow的11000个问题
作者 | Nick Roberts编译 | AI科技大本营(ID:rgznai100)自 2008 年成立以来,Stack Overflow 一直在拯救所有类型的开发人员。自那时以来,开发人员提出了数百万个关于开发领域的问题。但是,迫使开发者转向 Stack Overfl…
OpenCV3.3中决策树(Decision Tree)接口简介及使用
OpenCV 3.3中给出了决策树Decision Tres算法的实现,即cv::ml::DTrees类,此类的声明在include/opencv2/ml.hpp文件中,实现在modules/ml/src/tree.cpp文件中。其中:(1)、cv::ml::DTrees类:继承自cv::ml::StateModel&…
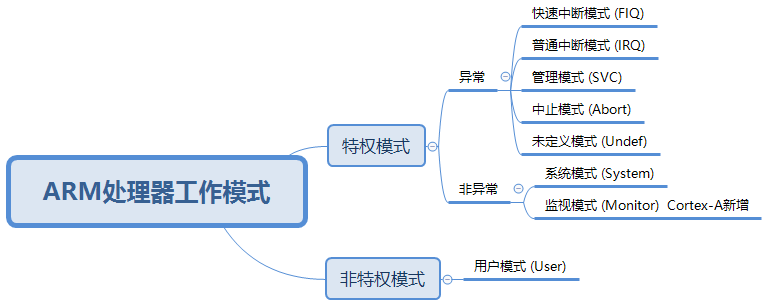
ARM 寄存器 和 工作模式了解
一. ARM 工作模式 1. ARM7,ARM9,ARM11,处理器有 7 种工作模式;Cortex-A 多了一个监视模式(Monitor) 2. 用户模式:非特权模式,大部分任务执行在这种模式,它运行在操作系…
英文版PDF不能显示中文PDF文件的解决方法
首先,PDF如果是英文版本的话,先装一个与之对应的PDF中文包。装上之后要检查的两项:1、PDF本身打开Adobe pdf选择“edit”"Preference""Internet"将"internet"下的三个勾全部勾上"OK"2、IE设置打开IE…
Linux下__attribute__((visibility (default)))的使用
在Linux下动态库(.so)中,通过GCC的C visibility属性可以控制共享文件导出符号。在GCC 4.0及以上版本中,有个visibility属性,可见属性可以应用到函数、变量、模板以及C类。 限制符号可见性的原因:从动态库中尽可能少地输出符号是一…