Eigen/Matlab 使用小结
文章目录
- [Eigen Matlab使用小结](https://www.cnblogs.com/rainbow70626/p/8819119.html)
- Eigen初始化
- 0.[官网资料](http://eigen.tuxfamily.org/index.php?title=Main_Page)
- 1. Eigen Matlab矩阵定义
- 2. Eigen Matlab基础使用
- 3. Eigen Matlab特殊矩阵生成
- 4. Eigen Matlab矩阵分块
- 5. Eigen Matlab矩阵元素交换
- 6. Eigen Matlab矩阵转置
- 7. Eigen Matlab矩阵乘积
- 8.Eigen Matlab矩阵单个元素操作
- 9. Eigen Matlab矩阵化简
- 10. Eigen Matlab矩阵点乘
- 11. Eigen Matlab矩阵类型转换
- 12. Eigen Matlab求解线性方程组 Ax = b
- 13. Eigen Matlab矩阵特征值
Eigen Matlab使用小结
Eigen 是一个基于C++模板的线性代数库,直接将库下载后放在项目目录下,然后包含头文件就能使用,非常方便。此外,Eigen的接口清晰,稳定高效。 Eigen 的 API 接口与 Matlab对应的接口见原文。
Eigen初始化
0.官网资料
Eigen is versatile
它支持所有矩阵大小,从小的固定大小矩阵到任意大的密集矩阵,甚至是稀疏矩阵。
它支持所有标准数字类型,包括std :: complex,整数,并且可以轻松扩展为自定义数字类型。
它支持各种矩阵分解和几何特征。
它的不受支持模块的生态系统提供了许多专门功能,例如非线性优化,矩阵函数,多项式求解器,FFT等。
Eigen is fast
表达式模板允许在适当的情况下智能地删除临时文件并启用惰性计算。
明确的矢量为SSE 2/3/4,AVX,AVX2,FMA,AVX512,ARM NEON(32位和64位),的PowerPC的AltiVec / VSX(32位和64位),ZVector(s390x /执行zEC13)SIMD指令集,以及自3.4 MIPS以来的MSA,可平滑回退到非矢量化代码。
固定大小的矩阵已完全优化:避免了动态内存分配,并且在有意义的情况下展开了循环。
对于大型矩阵,要特别注意缓存的友好性。
Eigen is reliable
为确保可靠性,精心选择了算法。可靠性折衷已得到明确记录,并且可以进行非常 安全的 分解。
Eigen已通过其自己的测试套件(超过500个可执行文件),标准的BLAS测试套件以及LAPACK测试套件的一部分进行了全面测试。
Eigen is elegant
由于表达式模板,C ++程序员感觉自然而然,该API非常干净和可表达。
在Eigen之上实现算法感觉就像在复制伪代码。
由于我们针对许多编译器运行测试套件,因此Eigen具有良好的编译器支持,以确保可靠性并解决所有编译器错误。Eigen还是标准的C ++ 98,并保持非常合理的编译时间。
文献资料
Eigen 3文档:包括入门指南,详尽的教程,快速参考,以及有关从Eigen 2移植到Eigen 3的页面。
1. Eigen Matlab矩阵定义
#include <Eigen/Dense>Matrix<double, 3, 3> A; // Fixed rows and cols. Same as Matrix3d.
Matrix<double, 3, Dynamic> B; // Fixed rows, dynamic cols.
Matrix<double, Dynamic, Dynamic> C; // Full dynamic. Same as MatrixXd.
Matrix<double, 3, 3, RowMajor> E; // Row major; default is column-major.
Matrix3f P, Q, R; // 3x3 float matrix.
Vector3f x, y, z; // 3x1 float matrix.
RowVector3f a, b, c; // 1x3 float matrix.
VectorXd v; // Dynamic column vector of doubles// Eigen // Matlab // comments
x.size() // length(x) // vector size
C.rows() // size(C,1) // number of rows
C.cols() // size(C,2) // number of columns
x(i) // x(i+1) // Matlab is 1-based
C(i,j) // C(i+1,j+1) //
2. Eigen Matlab基础使用
// Basic usage
// Eigen // Matlab // comments
x.size() // length(x) // vector size
C.rows() // size(C,1) // number of rows
C.cols() // size(C,2) // number of columns
x(i) // x(i+1) // Matlab is 1-based
C(i, j) // C(i+1,j+1) //A.resize(4, 4); // Runtime error if assertions are on.
B.resize(4, 9); // Runtime error if assertions are on.
A.resize(3, 3); // Ok; size didn't change.
B.resize(3, 9); // Ok; only dynamic cols changed.A << 1, 2, 3, // Initialize A. The elements can also be4, 5, 6, // matrices, which are stacked along cols7, 8, 9; // and then the rows are stacked.
B << A, A, A; // B is three horizontally stacked A's.
A.fill(10); // Fill A with all 10's.
3. Eigen Matlab特殊矩阵生成
// Eigen // Matlab
MatrixXd::Identity(rows,cols) // eye(rows,cols)
C.setIdentity(rows,cols) // C = eye(rows,cols)
MatrixXd::Zero(rows,cols) // zeros(rows,cols)
C.setZero(rows,cols) // C = ones(rows,cols)
MatrixXd::Ones(rows,cols) // ones(rows,cols)
C.setOnes(rows,cols) // C = ones(rows,cols)
MatrixXd::Random(rows,cols) // rand(rows,cols)*2-1 // MatrixXd::Random returns uniform random numbers in (-1, 1).
C.setRandom(rows,cols) // C = rand(rows,cols)*2-1
VectorXd::LinSpaced(size,low,high) // linspace(low,high,size)'
v.setLinSpaced(size,low,high) // v = linspace(low,high,size)'
4. Eigen Matlab矩阵分块
// Matrix slicing and blocks. All expressions listed here are read/write.
// Templated size versions are faster. Note that Matlab is 1-based (a size N
// vector is x(1)...x(N)).
// Eigen // Matlab
x.head(n) // x(1:n)
x.head<n>() // x(1:n)
x.tail(n) // x(end - n + 1: end)
x.tail<n>() // x(end - n + 1: end)
x.segment(i, n) // x(i+1 : i+n)
x.segment<n>(i) // x(i+1 : i+n)
P.block(i, j, rows, cols) // P(i+1 : i+rows, j+1 : j+cols)
P.block<rows, cols>(i, j) // P(i+1 : i+rows, j+1 : j+cols)
P.row(i) // P(i+1, :)
P.col(j) // P(:, j+1)
P.leftCols<cols>() // P(:, 1:cols)
P.leftCols(cols) // P(:, 1:cols)
P.middleCols<cols>(j) // P(:, j+1:j+cols)
P.middleCols(j, cols) // P(:, j+1:j+cols)
P.rightCols<cols>() // P(:, end-cols+1:end)
P.rightCols(cols) // P(:, end-cols+1:end)
P.topRows<rows>() // P(1:rows, :)
P.topRows(rows) // P(1:rows, :)
P.middleRows<rows>(i) // P(i+1:i+rows, :)
P.middleRows(i, rows) // P(i+1:i+rows, :)
P.bottomRows<rows>() // P(end-rows+1:end, :)
P.bottomRows(rows) // P(end-rows+1:end, :)
P.topLeftCorner(rows, cols) // P(1:rows, 1:cols)
P.topRightCorner(rows, cols) // P(1:rows, end-cols+1:end)
P.bottomLeftCorner(rows, cols) // P(end-rows+1:end, 1:cols)
P.bottomRightCorner(rows, cols) // P(end-rows+1:end, end-cols+1:end)
P.topLeftCorner<rows,cols>() // P(1:rows, 1:cols)
P.topRightCorner<rows,cols>() // P(1:rows, end-cols+1:end)
P.bottomLeftCorner<rows,cols>() // P(end-rows+1:end, 1:cols)
P.bottomRightCorner<rows,cols>() // P(end-rows+1:end, end-cols+1:end)
5. Eigen Matlab矩阵元素交换
// Of particular note is Eigen's swap function which is highly optimized.
// Eigen // Matlab
R.row(i) = P.col(j); // R(i, :) = P(:, i)
R.col(j1).swap(mat1.col(j2)); // R(:, [j1 j2]) = R(:, [j2, j1])
6. Eigen Matlab矩阵转置
// Views, transpose, etc; all read-write except for .adjoint().
// Eigen // Matlab
R.adjoint() // R'
R.transpose() // R.' or conj(R')
R.diagonal() // diag(R)
x.asDiagonal() // diag(x)
R.transpose().colwise().reverse(); // rot90(R)
R.conjugate() // conj(R)
7. Eigen Matlab矩阵乘积
// All the same as Matlab, but matlab doesn't have *= style operators.
// Matrix-vector. Matrix-matrix. Matrix-scalar.
y = M*x; R = P*Q; R = P*s;
a = b*M; R = P - Q; R = s*P;
a *= M; R = P + Q; R = P/s;R *= Q; R = s*P;R += Q; R *= s;R -= Q; R /= s;
8.Eigen Matlab矩阵单个元素操作
// Vectorized operations on each element independently
// Eigen // Matlab
R = P.cwiseProduct(Q); // R = P .* Q
R = P.array() * s.array();// R = P .* s
R = P.cwiseQuotient(Q); // R = P ./ Q
R = P.array() / Q.array();// R = P ./ Q
R = P.array() + s.array();// R = P + s
R = P.array() - s.array();// R = P - s
R.array() += s; // R = R + s
R.array() -= s; // R = R - s
R.array() < Q.array(); // R < Q
R.array() <= Q.array(); // R <= Q
R.cwiseInverse(); // 1 ./ P
R.array().inverse(); // 1 ./ P
R.array().sin() // sin(P)
R.array().cos() // cos(P)
R.array().pow(s) // P .^ s
R.array().square() // P .^ 2
R.array().cube() // P .^ 3
R.cwiseSqrt() // sqrt(P)
R.array().sqrt() // sqrt(P)
R.array().exp() // exp(P)
R.array().log() // log(P)
R.cwiseMax(P) // max(R, P)
R.array().max(P.array()) // max(R, P)
R.cwiseMin(P) // min(R, P)
R.array().min(P.array()) // min(R, P)
R.cwiseAbs() // abs(P)
R.array().abs() // abs(P)
R.cwiseAbs2() // abs(P.^2)
R.array().abs2() // abs(P.^2)
(R.array() < s).select(P,Q); // (R < s ? P : Q)
9. Eigen Matlab矩阵化简
// Reductions.
int r, c;
// Eigen // Matlab
R.minCoeff() // min(R(:))
R.maxCoeff() // max(R(:))
s = R.minCoeff(&r, &c) // [s, i] = min(R(:)); [r, c] = ind2sub(size(R), i);
s = R.maxCoeff(&r, &c) // [s, i] = max(R(:)); [r, c] = ind2sub(size(R), i);
R.sum() // sum(R(:))
R.colwise().sum() // sum(R)
R.rowwise().sum() // sum(R, 2) or sum(R')'
R.prod() // prod(R(:))
R.colwise().prod() // prod(R)
R.rowwise().prod() // prod(R, 2) or prod(R')'
R.trace() // trace(R)
R.all() // all(R(:))
R.colwise().all() // all(R)
R.rowwise().all() // all(R, 2)
R.any() // any(R(:))
R.colwise().any() // any(R)
R.rowwise().any() // any(R, 2)
10. Eigen Matlab矩阵点乘
// Dot products, norms, etc.
// Eigen // Matlab
x.norm() // norm(x). Note that norm(R) doesn't work in Eigen.
x.squaredNorm() // dot(x, x) Note the equivalence is not true for complex
x.dot(y) // dot(x, y)
x.cross(y) // cross(x, y) Requires #include <Eigen/Geometry>
11. Eigen Matlab矩阵类型转换
Type conversion
// Eigen // Matlab
A.cast<double>(); // double(A)
A.cast<float>(); // single(A)
A.cast<int>(); // int32(A)
A.real(); // real(A)
A.imag(); // imag(A)
// if the original type equals destination type, no work is done
12. Eigen Matlab求解线性方程组 Ax = b
// Solve Ax = b. Result stored in x. Matlab: x = A \ b.
x = A.ldlt().solve(b)); // A sym. p.s.d. #include <Eigen/Cholesky>
x = A.llt() .solve(b)); // A sym. p.d. #include <Eigen/Cholesky>
x = A.lu() .solve(b)); // Stable and fast. #include <Eigen/LU>
x = A.qr() .solve(b)); // No pivoting. #include <Eigen/QR>
x = A.svd() .solve(b)); // Stable, slowest. #include <Eigen/SVD>
// .ldlt() -> .matrixL() and .matrixD()
// .llt() -> .matrixL()
// .lu() -> .matrixL() and .matrixU()
// .qr() -> .matrixQ() and .matrixR()
// .svd() -> .matrixU(), .singularValues(), and .matrixV()
13. Eigen Matlab矩阵特征值
// Eigenvalue problems
// Eigen // Matlab
A.eigenvalues(); // eig(A);
EigenSolver<Matrix3d> eig(A); // [vec val] = eig(A)
eig.eigenvalues(); // diag(val)
eig.eigenvectors(); // vec
// For self-adjoint matrices use SelfAdjointEigenSolver<>
// Matlab
A.eigenvalues(); // eig(A);
EigenSolver eig(A); // [vec val] = eig(A)
eig.eigenvalues(); // diag(val)
eig.eigenvectors(); // vec
// For self-adjoint matrices use SelfAdjointEigenSolver<>
相关文章:

GitHUb 代码提交遇到的问题以及解决办法
git 添加代码出现以下错误: fatal: Unable to create F:/wamp/www/ThinkPhpStudy/.git/index.lock: File exists. If no other git process is currently running, this probably means a git process crashed in this repository earlier. Make sure no other git …
isContinuous 反色处理
cv::Mat inverseColor5(cv::Mat srcImage) {int row srcImage.rows;int col srcImage.cols;cv::Mat tempImage srcImage.clone();// 判断是否是连续图像,即是否有像素填充if( srcImage.isContinuous() && tempImage.isContinuous() ){row 1;// 按照行展…

阿里云智能对话分析服务
2019独角兽企业重金招聘Python工程师标准>>> 关于智能对话分析服务 智能对话分析服务 (Smart Conversation Analysis) 依托于阿里云语音识别和自然语言分析技术,为企业用户提供智能的对话分析服务,支持语音和文本数据的接入。可用于电话/在线…

【Smooth】非线性优化
文章目录非线性优化0 .case实战0.1求解思路0.2 g2o求解1. 状态估计问题1.1 最大后验与最大似然1.2 最小二乘的引出2. 非线性最小二乘2.1 一阶和二阶梯度法2.2 高斯牛顿法2.2 列文伯格-马夸尔特方法(阻尼牛顿法)3 Ceres库的使用4 g2o库的使用非线性优化 0 .case实战…
.net 基于Jenkins的自动构建系统开发
先让我给描述一下怎么叫一个自动构建或者说是持续集成 : 就拿一个B/S系统的合作开发来说,在用SVN版本控制的情况下,每个人完成自己代码的编写,阶段性提交代码,然后测试-修改,最后到所有代码完工,…
LUT 查表反色处理
cv::Mat inverseColor6(cv::Mat srcImage) {int row srcImage.rows;int col srcImage.cols;cv::Mat tempImage srcImage.clone();// 建立LUT 反色tableuchar LutTable[256];for (int i 0; i < 256; i)LutTable[i] 255 - i;cv::Mat lookUpTable(1, 256, CV_8U);uchar* p…
个人怎么发表期刊具体细节
目前在国内期刊发表,似乎已经成为非常普遍的一种现象,当然普通期刊发表的人数是比较多的,但是同样也有很多人选择核心期刊进行发表在众多期刊当中核心期刊,绝对是比较高级的刊物。很多人都想了解个人怎么发表期刊,那么…
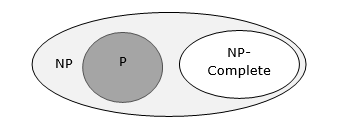
【Math】P=NP问题
文章目录**P vs NP****0 PNP基本定义**0.1 Definition of NP-Completeness0.2 NP-Complete Problems0.3 NP-Hard Problems0.4 TSP is NP-Complete0.5 Proof**1 PNP问题****2 千禧年世纪难题****3 P类和NP类问题特征****4 多项式时间****5 现实中的NP类问题****6 大突破之NPC问题…

窥探react事件
写在前面 本文源于本人在学习react过程中遇到的一个问题;本文内容为本人的一些的理解,如有不对的地方,还请大家指出来。本文是讲react的事件,不是介绍其api,而是猜想一下react合成事件的实现方式 遇到的问题 class Eve…

Python内置方法
一、常用的内置方法 1、__new__ 和 __init__: __new__ 构造方法 、__init__初始化函数1、__new__方法是真正的类构造方法,用于产生实例化对象(空属性)。重写__new__方法可以控制对象的产 生过程。也就是说会通过继承object的new方…

【OpenCV 】Sobel 导数/Laplace 算子/Canny 边缘检测
canny边缘检测见OpenCV 【七】————边缘提取算子(图像边缘提取)——canny算法的原理及实现 1 Sobel 导数 1.1.1 原因 上面两节我们已经学习了卷积操作。一个最重要的卷积运算就是导数的计算(或者近似计算). 为什么对图像进行求导是重要的呢? 假设我…
RGB 转 HSV
#include <opencv2/core/core.hpp> #include <opencv2/highgui/highgui.hpp> #include <opencv2/imgproc/imgproc.hpp> #include <iostream> int main() {// 图像源读取及判断cv::Mat srcImage cv::imread("22.jpg");if (!srcImage.data) …
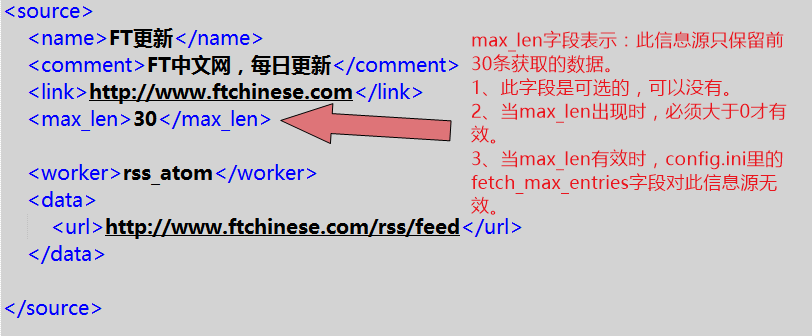
2017.1.9版给信息源新增:max_len、max_db字段
2017.1.8a版程序给信息源增加max_len、max_db字段,分别用于控制:获取条数、数据库保留条数。 max_len的说明见此图: max_db的说明见此图: 当max_len和max_db的设置不合理时(比如max_len大于max_db,会导致反…
索引使用的几个原则
索引的使用尽量满足以下几个原则: 全值匹配最左前缀不在索引列上做任何操作(包括但不限于,计算,函数,类型转换),会导致对应列索引失效。不适用索引中范围条件右边的列尽量使用覆盖索引使用不等于或者not in 的时候回变…

【OpenCV 】Remapping 重映射¶
目录 1.1目标 1.2 理论 1.3 代码 1.4 运行结果 1.1目标 展示如何使用OpenCV函数 remap 来实现简单重映射. 1.2 理论 把一个图像中一个位置的像素放置到另一个图片指定位置的过程. 为了完成映射过程, 有必要获得一些插值为非整数像素坐标,因为源图像与目标图像的像素坐标…
C# GUID的使用
GUID(全局统一标识符)是指在一台机器上生成的数字,它保证对在同一时空中的所有机器都是唯一的。通常平台会提供生成GUID的API。生成算法很有意思,用到了以太网卡地址、纳秒级时间、芯片ID码和许多可能的数字。GUID的唯一缺陷在于生…
文件名有规则情况读取
#include <iostream> #include <stdio.h> #include <stdlib.h> #include <opencv2/highgui/highgui.hpp> #include <opencv2/imgproc/imgproc.hpp> using namespace cv; using namespace std; int main() {// 定义相关参数const int num 4;char…
编写自己的SpringBoot-starter
2019独角兽企业重金招聘Python工程师标准>>> 前言 原理 首先说说原理,我们知道使用一个公用的starter的时候,只需要将相应的依赖添加的Maven的配置文件当中即可,免去了自己需要引用很多依赖类,并且SpringBoot会自动进行…
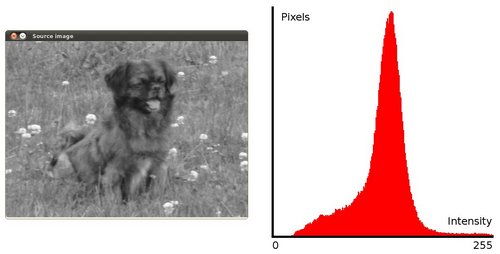
【OpenCV 】直方图均衡化,直方图计算,直方图对比
目录 1.直方图均衡化 1.1 原理 1.2 直方图均衡化 1.3 直方图均衡化原理 1.4 代码实例 1.5 运行效果 2. 直方图计算 2.1 目标 2.2 直方图 2.3 代码实例 2.4 运行结果 3 直方图对比 3.1 目标 3.2 原理 3.3 代码 3.4 运行结果 1.直方图均衡化 什么是图像的直方图和…

c语言实现线性结构(数组与链表)
由于这两天看了数据结构,所以又把大学所学的c语言和指针"挂"起来了。本人菜鸟一枚请多多指教。下面是我这两天学习的成果(数组和链表的实现,用的是c语言哦!哈哈)。(一)数组的实现和操…
OTSU 二值化的实现
#include <stdio.h> #include <string> #include "opencv2/highgui/highgui.hpp" #include "opencv2/opencv.hpp" using namespace std; using namespace cv; // 大均法函数实现 int OTSU(cv::Mat srcImage) {int nCols srcImage.cols;int nR…

vivo7.0系统机器(亲测有效)激活Xposed框架的教程
对于喜欢搞机的机友来说,常常会使用到Xposed框架和种种功能牛逼的模块,对于5.0以下的系统版本,只要手机能获得Root权限,安装和激活Xposed框架是异常轻松的,但随着系统版本的升级,5.0以后的系统,…

【OpenCV 】反向投影
目录 1 目标 2原理:什么是反向投影? 3 代码实现 4 实现结果 1 目标 什么是反向投影,它可以实现什么功能? 如何使用OpenCV函数 calcBackProject 计算反向投影? 如何使用OpenCV函数 mixChannels 组合图像的不同通道…
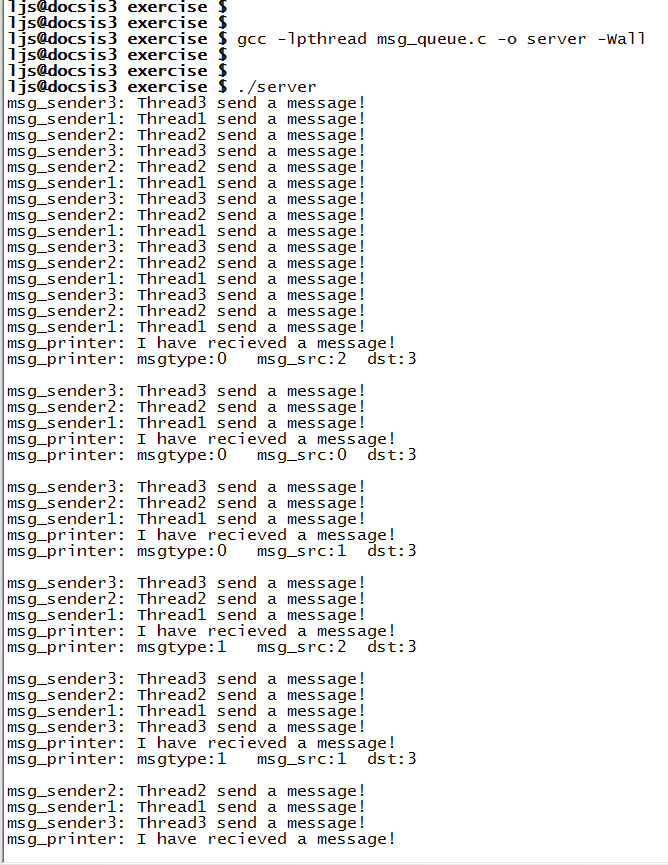
Linux编程之自定义消息队列
我这里要讲的并不是IPC中的消息队列,我要讲的是在进程内部实现自定义的消息队列,让各个线程的消息来推动整个进程的运动。进程间的消息队列用于进程与进程之间的通信,而我将要实现的进程内的消息队列是用于有序妥当处理来自于各个线程请求&am…
threshold 二值化的实现
#include "opencv2/imgproc/imgproc.hpp" #include "opencv2/highgui/highgui.hpp" int main( ) {// 读取源图像及判断cv::Mat srcImage cv::imread("..\\images\\hand1.jpg");if( !srcImage.data ) return 1;// 转化为灰度图像cv::Mat srcGray…
如何定时备份数据库并上传七牛云
前言: 这篇文章主要记录自己在备份数据库文件中踩的坑和解决办法。 服务器数据库备份文件之后上传到七牛云 备份数据库文件在服务器根目录下 创建 /backup/qiniu/.backup.sh #!/bin/bash# vuemall 数据库名称 # blog_runner vuemall 的管理用户# admin vuem…

【OpenCV 】计算物体的凸包/创建包围轮廓的矩形和圆形边界框/createTrackbar添加滑动条/
目录 topic 1:模板匹配 topic 2:图像中寻找轮廓 topic 3:计算物体的凸包 topic 4:轮廓创建可倾斜的边界框和椭圆 topic 5:轮廓矩 topic 6:为程序界面添加滑动条 3.1 目标 3.2 代码实例1 3.3 代码实例2 3.4 实例3运行结果 3.5 运行结果 topic 1:模板匹配 topic 2:图…
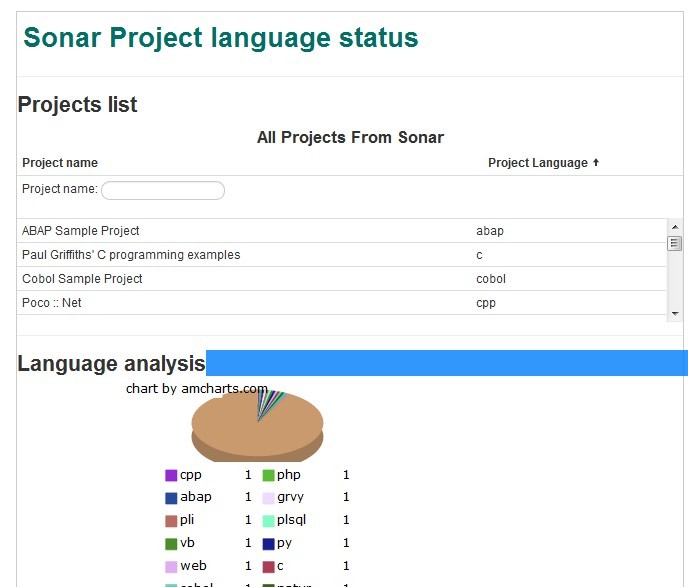
开源:Angularjs示例--Sonar中项目使用语言分布图
在博客中介绍google的Angularjs 客户端PM模式框架很久了,今天发布一个关于AngularJs使用是简单示例SonarLanguage(示例位于Github:https://github.com/greengerong/SonarLanguage)。本项目只是一个全为客户端的示例项目。项目的初始是我想看看在公司的项…
adaptiveThreshold 阈值化的实现
#include "opencv2/imgproc/imgproc.hpp" #include "opencv2/highgui/highgui.hpp" int main( ) {// 图像读取及判断cv::Mat srcImage cv::imread("..\\images\\hand1.jpg");if( !srcImage.data ) return 1;// 灰度转换cv::Mat srcGray;cv::cvt…
hashMap传入参数,table长度为多少
前言 我的所有文章同步更新与Github--Java-Notes,想了解JVM,HashMap源码分析,spring相关,剑指offer题解(Java版),可以点个star。可以看我的github主页,每天都在更新哟。 邀请您跟我一同完成 rep…