SLAM精度测评——EVO进阶
1. 基本概念
1.1 Umeyama算法
ATE:
evo_ape tum state_groundtruth_estimate0/data.tum orb2/CameraTrajectory.txt -r trans_part -va --plot --plot_mode xy --save_results /home/sun/evo/v1_01_easy/orb2/ate.zip
RPE:
evo_rpe tum state_groundtruth_estimate0/data.tum orb2/CameraTrajectory.txt -r full --delta 1 --delta_unit m -va --plot --plot_mode xy --save_results /home/sun/evo/v1_01_easy/orb2/rpe.zip
1.2 SE(3)与Sim(3)
双目SLAM和RGB-D SLAM,尺度统一,因此我们需要通过最小二乘法计算一个从估计位姿到真实位姿的转换矩阵 [公式] 对于单目相机,具有尺度不确定性,我们需要计算一个从估计位姿 [公式] 到真实位姿 [公式] 的相似变换矩阵 [公式] 。在evo代码中,给予 --correct_scale命令就会估计Sim,否则默认为SE(3)。
2. 测试标准机器含义
1. evo_ape 计算绝对位姿误差
evo_ape tum data.tum pos_and_quate.txt -r full -va --plot --plot_mode xyz --save_results /home/sun/evo/mh_01_easy/ours.zip
-r full/rot_part/…
计算考虑平移和旋转部分误差的ape,进行平移和旋转对齐,其中-r表示ape所基于的姿态关系不添加-r/–pose_relation和可选项,则默认为trans_part。
1.1 metrics解析
上文提到pose error包含平移和旋转两部分误差,在evo中的option为-r,–pose_relation,并有如下模式:

其中trans_part很容易理解,但是无单位的full和rot_part的误差指标比较特殊,使用了矩阵的二范数:
error_full=∥δT_i − E∥, \̲d̲e̲l̲t̲a̲T̲_i表示groundtruth和estimate位姿之间的变换矩阵,E 为单位阵,矩阵的范数也可以表示某种抽象的空间距离
同理rot_part的误差:
ERROR_rot = ∥ δR_i − E ∥
相比较而言,用平移误差单位为m,旋转误差单位可以是度或弧度,更容易理解。从旋转矩阵R 到旋转角的转换使用了罗德里格斯公式(旋转向量的二范数为旋转角的大小)。
-v表示verbose mode,详细模式,-a表示采用SE(3) Umeyama对齐,其余可选项如下表所示。不加-s表示默认尺度对齐参数为1.0,即不进行尺度对齐。

2. evo_rpe 计算相对位姿误差
相对位姿误差不进行绝对位姿的比较,相对位姿误差比较运动(姿态增量)。相对位姿误差可以给出局部精度,例如slam系统每米的平移或者旋转漂移量。
evo_rpe tum data.tum pos_and_quate.txt -r angle_deg --delta 1 --delta_unit m -va --plot --plot_mode xz --save_plot ./VIO --save_results /home/sun/evo/mh_01_easy/ours_rpe.zip
命令的含义为 求每米考虑旋转角的rpe,以详细模式显示并画图。
其中-r表示ape所基于的姿态关系

不添加-r/–pose_relation和可选项,则默认为trans_part。
–d/–delta表示相对位姿之间的增量,–u/–delta_unit表示增量的单位,可选参数为[f, d, r, m],分别表示[frames, deg, rad, meters]。–d/–delta -u/–delta_unit合起来表示衡量局部精度的单位,如每米,每弧度,每百米等。其中–delta_unit为f时,–delta的参数必须为整形,其余情况下可以为浮点型。–delta 默认为1,–delta_unit默认为f。
当在命令中加上–all_pairs,则计算rpe时使用位置数据中所有的对而不是仅连续对,此时,可以通过-t/–delta_tol控制–all_pairs模式下的相对增量的容差(relative delta tolerance)。需要注意–all_pairs下不能使用–plot函数。
3. evo_config 全局设置和配置文件操作
evo_config set 进行参数设置
下面是几个常用的参数,其含义以及可选项
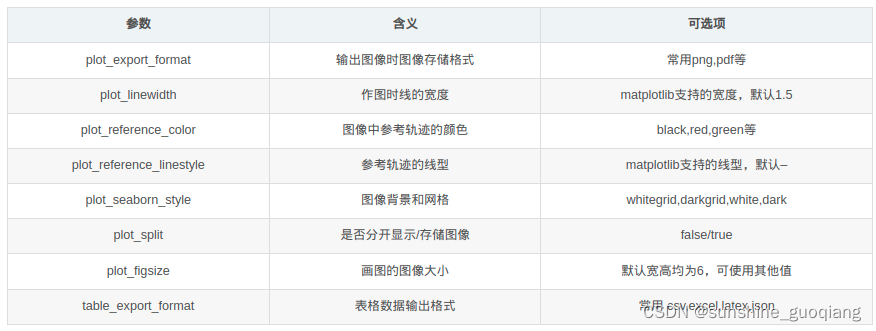
例如命令
evo_config set plot_seaborn_style whitegrid 将画图背景更改成白色网格
evo_config set plot_fontfamily serif plot_fontscale 1.2 将字体改为衬线型并调为1.2倍大小
evo_config set plot_reference_linestyle - 将画图所使用的线型改为 -
evo_config set plot_figsize 10 9 将所画图的图像大小调整为10 9(宽 高)
evo_config reset 将参数还原到默认值
evo_config generate 将命令行参数转换成–out指定的.json文件
例如:evo_config generate --pose_relation angle_deg --delta 1 --delta_unit m --verbose --plot --out rpe_config.json
4. evo_traj 轨迹管理的主要工具
evo_traj可以打开任意多个轨迹,查看统计信息。-v表示以详细模式显示,–full_check可以对轨迹进行检查。=
evo_traj euroc MH_data1.csv MH_data3.csv -v --full_check
如果需要将轨迹对齐(-a/ --align, -s / --correct_scale, --n_to_align),则需要利–ref指定参考轨迹。例如evo_traj bag ROS_example.bag ORB-SLAM S-PTAM --ref groundtruth -s
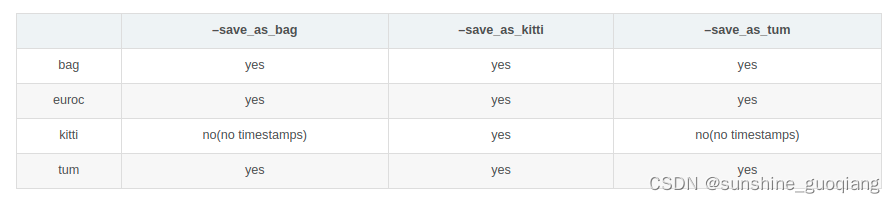
因euroc格式只对euroc数据集的groundtruth数据有意义,所以没有–save_as_euroc。
evo_traj euroc data.csv --save_as_tum
可通过 evo_traj +数据格式 + --help查看更多参数的含义以及如何使用。例如
evo_traj euroc --help
5. evo_res 进行结果比较
evo_res --help可查看可选参数含义。
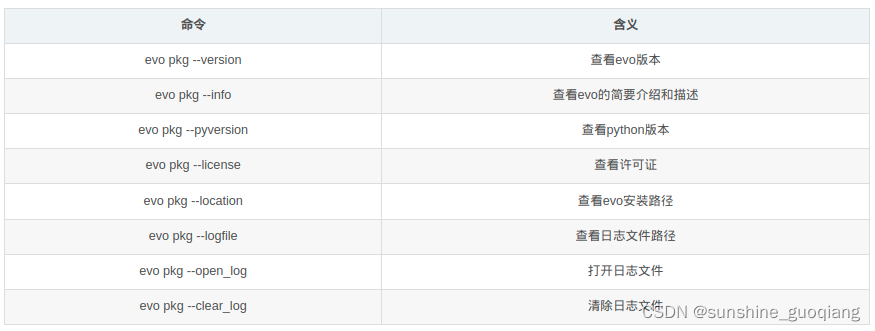
evo其他常用命令
3. ref
- https://github.com/MichaelGrupp/evo/wiki/evo_traj
- https://github.com/MichaelGrupp/evo/wiki
- https://github.com/MichaelGrupp/evo
- 【SLAM】评估轨迹误差,手写ATE、RPE对比EVO
相关文章:

python读取图片并且显示
使用python-opencv读取图片,利用opencv或matplotlib显示图片。 # -*- coding: utf-8 -*-import numpy as np from matplotlib import pyplot as plt #import urllib import cv2def load_image1(file):# Load an color image in grayscaleimg cv2.imread(file,0)cv…

shiro认证
shiro权限认证: 具体的认证流程是这样的: 一般流程: 通过.ini的文件来初始化工厂,.ini的文件的好处是可以创建多个组,而.properties的文件只能创建一组。 系统默认有shiro.ini的文件,但是一般我们是自定义数…
小猿圈Linux基础面试题,看看你能答对几道?
最近身边的很多朋友都在学习linux,从最开始的安装软件都需要百度一天的他们,现在已经成长为了,不需要百度就可以把自己弄懵圈的了,接下来的几天小猿圈linux老师会为大家准备一些实用的linux技巧分析给大家,希望对你有所…
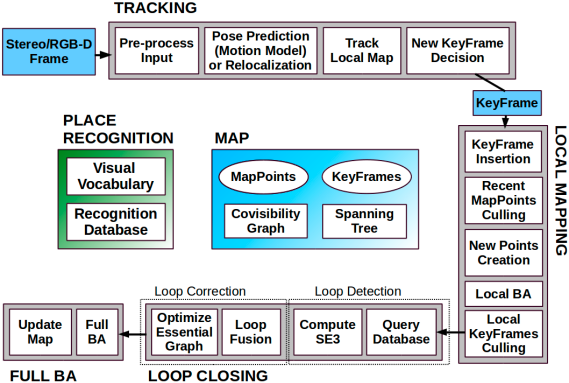
ORB-SLAM2 论文翻译
https://ug98gs7tbw.feishu.cn/docs/doccnKKOWAjkKv7AzAiEvbnM3Tf
mxnet教程1
import mxnet as mx #%matplotlib inline import os import subprocess import numpy as np import matplotlib.pyplot as plt import tarfileimport warnings warnings.filterwarnings("ignore", categoryDeprecationWarning)# 从内存中读取数据 def test1():data …

番外:Spring MVC环境搭建和Mybatis配置避坑篇
2019独角兽企业重金招聘Python工程师标准>>> web.xml引入对spring mvc的支持; spring-mvc配置spring-mvc; spring-mybatis配置mybatis支持,并指名mapper文件的位置; mybaits-config配置mybatis; jdbc.prope…
50个云终端只需一台服务器是怎么一回事
看到这个标题也许有人会说50个云终端只需要一台服务器这应该是不可能的吧,即使是真的那这个服务器的配置和价格应该也要非常高的吧。但是如果有人和你说50个云终端只需要一台中等配置和价格的服务器就可以的呢。而且这50个用户桌面都可以正常的使用不会出现卡顿等现…
SLAM学习,小白入门到殿堂级大牛资料整理
总结一下我接触过的SLAM算法吧,主要集中在visual slam: 特征法: ORB SLAM https://github.com/raulmur/ORB_SLAM2优势: 在静态环境下定位准确,稳定, 单目和双目版本都可以达到实时(高于10frames/s)。代码可读性强,易扩展, 网上也有实现和imu融合的版本。 劣势:建的地图…
python解析json
“data.json”文件内容如下: {"id":"1220562","alt":"http:\/\/book.douban.com\/book\/1220562","rating":{"max":10, "average":"7.0", "numRaters":282, "min…
8.改进应用程序
2019独角兽企业重金招聘Python工程师标准>>> ##8.1数字格式设置(storyboard) ##8.1.2可选类型拆封 import Cocoa extension Double{var dollars : String{let formatter : NumberFormatter NumberFormatter()//NSNumberFormatter弃用var re…
小猿圈Linux学习-Linux种搜索的命令
做Linux工程师的每天都不能少的工作就是搜索文件,这是他们的日常活动,很繁琐很枯燥,所以我们就需要知道一些搜索的命令,这些命令更高效更快捷,今天小猿圈就给大家分享4个可以搜索的Linux命令。。 方法 1:使…

SURF与SIFT比较分析
opencv3.2 SURF实现特征点匹配 opencv3.2中SurfFeatureDetector、SurfDescriptorExtractor、BruteForceMatcher这三个的使用方法已经和原先2.4版本前不一样了。 使用方法示例如下: Ptr<SURF> detector SURF::create(minHessian);detector->detect(img_1…
python文件和目录
# -*- coding: utf-8 -*-import osdef printFile(rootDir):allFiles os.listdir(rootDir) #列出文件夹下所有文件和目录for i in range(0, len(allFiles)):# print(rootDir allFiles[i])path os.path.join(rootDir, allFiles[i])if not os.path.isfile(path):print(path, &q…

你不怕他离职吗?
图片来自“wikiart” 这是我同事在晚上11点多跟我聊微信时问起的一个问题,我觉得这个问题还是挺有代表性的,所以我还是决定就这个问题展开聊聊我对这句话的看法。 我同事之所以这么说,是因为他的组员,也就是问题中的那个他&#x…
tensorflow 1
import tensorflow as tf import numpy as np import matplotlib.pylab as pltdef tfDemo1():#create datax_data np.random.rand(100).astype(np.float32)y_data x_data * 0.1 0.3#create tensorflow structureWeightstf.Variable(tf.random_uniform([1],-1.0,1.0)) #一维&…
SLAM资源整理
资源整理 浙大3D Group VINS orbslam2 orbslam2 video study https://www.bilibili.com/video/BV1bK4y197kB/?spm_id_fromautoNext orbslam2 csdn https://blog.csdn.net/ncepu_chen/category_9874746.html https://www.zhihu.com/column/c_1114864226103037952 https:…
Golang微服务开发实践
github: github.com/yun-mu/Micr… 微服务概念学习:可参考 Nginx 的微服务文章 微服务最佳实践:可参考 微服务最佳实践 demo 简介 服务: consignment-service(货运服务)user-service(用户服务)l…
Linux ssh/scp/docker学习
文章目录Linux ssh/scp/docker使用学习1. ssh 登录2. scp传输文件3. docker4. git checkout 替换指定分支的单个文件Linux ssh/scp/docker使用学习 1. ssh 登录 sudo ssh fireflyip (登录账号密码) scp -r company/data_depthfill/ firefly192.168.105.6:/tmp/ 2…
tensorflow mnist 1
import tensorflow as tf from tensorflow.examples.tutorials.mnist import input_data import keras.backend.tensorflow_backend as KTFdef add_layer(inputs,in_size,out_size,activation_functionNone):#Weights是一个矩阵,[行,列]为[in_size,out_s…
framework7使用笔记
2019独角兽企业重金招聘Python工程师标准>>> myApp.addView(.view-main, {}); 以上这句代码一定要添加 ,否则链接的页面不能正常加载 --------------------------------------------- 如果初始化时定义了preprocess,则页面上链接的自动加载将…
Linux:检查当前运行级别的五种方法
2019独角兽企业重金招聘Python工程师标准>>> 运行级就是Linux操作系统当前正在运行的功能级别。存在七个运行级别,编号从0到6。系统可以引导到任何给定的运行级别。运行级别由数字标识。每个运行级别指定不同的系统配置,并允许访问不同的进程…
概率机器人资料整理
机器人算法仿真 https://atsushisakai.github.io/PythonRobotics/ 最大熵对应的概率分布及其优化推导 https://www.cnblogs.com/yychi/p/9401807.html 矩阵计算网址 http://www.yunsuan.info/matrixcomputations/index.html
LLVM官方文档翻译---- LLVM原子指令与并发指引
英文原文地址:http://llvm.org/docs/Atomics.html 译文原文地址:http://blog.csdn.net/wuhui_gdnt/article/details/52485591 注:该文章转载已经得到译者授权。 --------------------------------------------------------------------------…
matplotlib画图
import matplotlib.pyplot as plt import numpy as npdef test1():# 从[-1,1]中等距去50个数作为x的取值x np.linspace(-1, 1, 50)print(x)y 2*x 1y1 2**x 1# 第一个是横坐标的值,第二个是纵坐标的值plt.plot(x, y)plt.plot(x, y1)# 必要方法,用于将…
学习新对象字面量语法
目标 使用简写属性名称使用简写方法名称使用计算属性名称问题 哪些部分是冗余的? const person{name:name,address:address,sayHello:function(){/*......*/},sayName:function(){/*......*/}sayAddress:function(){/*......*/}} 复制代码简写属性名称 //ES5 const message{te…
ORB-SLAM2代码/流程详解
ORB-SLAM2代码详解 文章目录ORB-SLAM2代码详解1. ORB-SLAM2代码详解01_ORB-SLAM2代码运行流程1 运行官方Demo1.2. 阅读代码之前你应该知道的事情1.2.1 变量命名规则1.3 理解多线程1.3.1 为什么要使用多线程?1.3.2 多线程中的锁1.4 SLAM主类System1.4.1 System类是ORB-SLAM2系统…
VS2010 CUDA 5.5 Win7 64位配置以及项目创建配置
一.安装CUDA5.5以及配置VS助手 1、安装之前必须确认自己电脑的GPU支持CUDA。在设备管理器中找到显示适配器(Display adapters),找到自己电脑的显卡型号,如果包含在http://www.nvidia.com/object/cuda_gpus.html的列表中,说明支持…

HTC VIVE SDK 中的例子 hellovr_opengl 程序流程分析
最近Vive的VR头盔设备很火,恰逢项目需求,所以对 SDK 中的例子 hellovr_opengl 做了比较细致的代码分析,先将流程图绘制如下,便于大家理解。 在ViVe头盔中实现立体效果的技术核心: 如果要外挂Vive的VR设备实现立体效果&…

Proximal Algorithms 4 Algorithms
目录 Proximal minimization解释\(f(x) g(x)\)解释1 最大最小算法不动点解释Forward-backward 迭代解释加速 proximal gradient method交替方向方法 ADMM解释1 自动控制解释2 Augmented Largranians解释3 Flow interpretation解释4 不动点特别的情况 \(f(x) g(Ax)\)Proximal …
C# TripleDES NoPadding 时对待加密内容进行补字节(8个字节为一个Block)
补一个空格(半角): private static byte[] FormatData(String str) {var yu str.Length % 8;if (yu 0) return Encoding.GetEncoding(Consts.Charset).GetBytes(str);var size 8 - yu;var arr new byte[str.Length size];var data Enco…