OpenCV 图像采样 插值 几何变换
转自:http://hi.baidu.com/xiaoduo170/blog/item/6eefc612c9f8e9c6c2fd786f.html
InitLineIterator
初始化线段迭代器
int cvInitLineIterator( const CvArr* image, CvPoint pt1, CvPoint pt2, CvLineIterator* line_iterator, int connectivity=8 );
- image
- 带采线段的输入图像. pt1
- 线段起始点 pt2
- 线段结束点 line_iterator
- 指向线段迭代器状态结构的指针 connectivity
- 被扫描线段的连通数,4 或 8.
函数 cvInitLineIterator 初始化线段迭代器,并返回两点之间的象素点数目。两个点必须在图像内。当迭代器初始化后,连接两点的光栅线上所有点,都可以连续通过调用 CV_NEXT_LINE_POINT 来得到。线段上的点是使用 4-连通或8-连通利用 Bresenham 算法逐点计算的。
例子:使用线段迭代器计算彩色线上象素值的和
CvScalar sum_line_pixels( IplImage* image, CvPoint pt1, CvPoint pt2 )
{ CvLineIterator iterator; int blue_sum = 0, green_sum = 0, red_sum = 0;
int count = cvInitLineIterator( image, pt1, pt2, &iterator, 8 );
for( int i = 0; i < count; i++ )
{ blue_sum += iterator.ptr[0]; green_sum += iterator.ptr[1];
red_sum += iterator.ptr[2];
CV_NEXT_LINE_POINT(iterator);
{ int offset, x, y; offset = iterator.ptr - (uchar*)(image->imageData);
y = offset/image->widthStep;
x = (offset - y*image->widthStep)/(3*sizeof(uchar) );
printf("(%d,%d)/n", x, y ); } }
return cvScalar( blue_sum, green_sum, red_sum ); }
SampleLine
将图像上某一光栅线上的像素数据读入缓冲区
int cvSampleLine( const CvArr* image, CvPoint pt1, CvPoint pt2, void* buffer, int connectivity=8 );
- image
- 输入图像 pt1
- 光栅线段的起点 pt2
- 光栅线段的终点 buffer
- 存储线段点的缓存区,必须有足够大小来存储点 max( |pt2.x-pt1.x|+1, |pt2.y-pt1.y|+1 ) :8-连通情况下,
- 或者 |pt2.x-pt1.x|+|pt2.y-pt1.y|+1 : 4-连通情况下. connectivity
- 线段的连通方式, 4 or 8.
函数 cvSampleLine 实现了线段迭代器的一个特殊应用。它读取由 pt1 和 pt2 两点确定的线段上的所有图像点,
包括终点,并存储到缓存中。
GetRectSubPix
从图像中提取象素矩形,使用子象素精度
void cvGetRectSubPix( const CvArr* src, CvArr* dst, CvPoint2D32f center );
- src
- 输入图像. dst
- 提取的矩形. center
- 提取的象素矩形的中心,浮点数坐标。中心必须位于图像内部.
函数 cvGetRectSubPix 从图像 src 中提取矩形:
dst(x, y) = src(x + center.x - (width(dst)-1)*0.5, y + center.y - (height(dst)-1)*0.5)
其中非整数象素点坐标采用双线性插值提取。对多通道图像,每个通道独立单独完成提取。尽管函数要求矩形的中心一定要在输入图像之中,
但是有可能出现矩形的一部分超出图像边界的情况,这时,该函数复制边界的模识(hunnish:即用于矩形相交的图像边界线段的象素来代替
矩形超越部分的象素)。
GetQuadrangleSubPix
提取象素四边形,使用子象素精度
void cvGetQuadrangleSubPix( const CvArr* src, CvArr* dst, const CvMat* map_matrix );
- src
- 输入图像. dst
- 提取的四边形. map_matrix
- 3 × 2 变换矩阵 [A|b] (见讨论).
函数 cvGetQuadrangleSubPix 以子象素精度从图像 src 中提取四边形,使用子象素精度,并且将结果存储于 dst ,计算公式是:
dst(x + width(dst) / 2,y + height(dst) / 2) = src(A11x + A12y + b1,A21x + A22y + b2)
其中 A和 b 均来自映射矩阵(译者注:A, b为几何形变参数) ,映射矩阵为:

其中在非整数坐标  的象素点值通过双线性变换得到。当函数需要图像边界外的像素点时,使用重复边界
的象素点值通过双线性变换得到。当函数需要图像边界外的像素点时,使用重复边界
模式(replication border mode)恢复出所需的值。多通道图像的每一个通道都单独计算。
例子:使用 cvGetQuadrangleSubPix 进行图像旋转
#include "cv.h"
#include "highgui.h"
#include "math.h"
int main( int argc, char** argv )
{ IplImage* src;
if( argc==2 && (src = cvLoadImage(argv[1], -1))!=0)
{ IplImage* dst = cvCloneImage( src );
int delta = 1;
int angle = 0;
cvNamedWindow( "src", 1 );
cvShowImage( "src", src );
for(;;)
{ float m[6];
double factor = (cos(angle*CV_PI/180.) + 1.1)*3;
CvMat M = cvMat( 2, 3, CV_32F, m );
int w = src->width;
int h = src->height;
m[0] = (float)(factor*cos(-angle*2*CV_PI/180.));
m[1] = (float)(factor*sin(-angle*2*CV_PI/180.));
m[2] = w*0.5f; m[3] = -m[1]; m[4] = m[0]; m[5] = h*0.5f;
cvGetQuadrangleSubPix( src, dst, &M, 1, cvScalarAll(0));
cvNamedWindow( "dst", 1 ); cvShowImage( "dst", dst );
if( cvWaitKey(5) == 27 ) break; angle = (angle + delta) % 360; } } return 0; }
Resize
图像大小变换
void cvResize( const CvArr* src, CvArr* dst, int interpolation=CV_INTER_LINEAR );
- src
- 输入图像. dst
- 输出图像. interpolation
- 插值方法:
- CV_INTER_NN - 最近邻插值,
- CV_INTER_LINEAR - 双线性插值 (缺省使用)
- CV_INTER_AREA - 使用象素关系重采样。当图像缩小时候,该方法可以避免波纹出现。当图像放大时,
类似于 CV_INTER_NN 方法..
- CV_INTER_CUBIC - 立方插值.
函数 cvResize 将图像 src 改变尺寸得到与 dst 同样大小。若设定 ROI,函数将按常规支持 ROI.
WarpAffine
对图像做仿射变换
void cvWarpAffine( const CvArr* src, CvArr* dst, const CvMat* map_matrix,
int flags=CV_INTER_LINEAR+CV_WARP_FILL_OUTLIERS, CvScalar fillval=cvScalarAll(0) );
- src
- 输入图像. dst
- 输出图像. map_matrix
- 2×3 变换矩阵 flags
- 插值方法和以下开关选项的组合:
- CV_WARP_FILL_OUTLIERS - 填充所有输出图像的象素。如果部分象素落在输入图像的边界外,
那么它们的值设定为 fillval.
- CV_WARP_INVERSE_MAP - 指定 map_matrix 是输出图像到输入图像的反变换,因此可以直接用来做象素插值。
- 否则, 函数从 map_matrix 得到反变换。
- fillval
- 用来填充边界外面的值
函数 cvWarpAffine 利用下面指定的矩阵变换输入图像:

- 如果没有指定 CV_WARP_INVERSE_MAP ,
 ,
,
- 否则,

函数与 cvGetQuadrangleSubPix 类似,但是不完全相同。 cvWarpAffine 要求输入和输出图像具有同样的数据类型,
有更大的资源开销(因此对小图像不太合适)而且输出图像的部分可以保留不变。而 cvGetQuadrangleSubPix 可以精确地从8位
图像中提取四边形到浮点数缓存区中,具有比较小的系统开销,而且总是全部改变输出图像的内容。
要变换稀疏矩阵,使用 cxcore 中的函数 cvTransform 。
GetAffineTransform
由三对点计算仿射变换
CvMat* cvGetAffineTransform( const CvPoint2D32f* src, const CvPoint2D32f* dst, CvMat* map_matrix );
- src
- 输入图像的三角形顶点坐标。 dst
- 输出图像的相应的三角形顶点坐标。 map_matrix
- 指向2×3输出矩阵的指针。
函数cvGetAffineTransform计算满足以下关系的仿射变换矩阵:

- 这里,dst(i) = (x'i,y'i),src(i) = (xi,yi),i = 0..2.
2DRotationMatrix
计算二维旋转的仿射变换矩阵
CvMat* cv2DRotationMatrix( CvPoint2D32f center, double angle, double scale, CvMat* map_matrix );
- center
- 输入图像的旋转中心坐标 angle
- 旋转角度(度)。正值表示逆时针旋转(坐标原点假设在左上角). scale
- 各项同性的尺度因子 map_matrix
- 输出 2×3 矩阵的指针
函数 cv2DRotationMatrix 计算矩阵:
[ α β | (1-α)*center.x - β*center.y ] [ -β α | β*center.x + (1-α)*center.y ] where α=scale*cos(angle),
β=scale*sin(angle)
该变换并不改变原始旋转中心点的坐标,如果这不是操作目的,则可以通过调整平移量改变其坐标(译者注:通过简单的推导可知,
仿射变换的实现是首先将旋转中心置为坐标原点,再进行旋转和尺度变换,最后重新将坐标原点设定为输入图像的左上角,
这里的平移量是center.x, center.y).
WarpPerspective
对图像进行透视变换
void cvWarpPerspective( const CvArr* src, CvArr* dst, const CvMat* map_matrix,
int flags=CV_INTER_LINEAR+CV_WARP_FILL_OUTLIERS, CvScalar fillval=cvScalarAll(0) );
- src
- 输入图像. dst
- 输出图像. map_matrix
- 3×3 变换矩阵 flags
- 插值方法和以下开关选项的组合:
- CV_WARP_FILL_OUTLIERS - 填充所有缩小图像的象素。如果部分象素落在输入图像的边界外,那么它们的值设定为 fillval.
- CV_WARP_INVERSE_MAP - 指定 matrix 是输出图像到输入图像的反变换,因此可以直接用来做象素插值。否则,
- 函数从 map_matrix 得到反变换。
- fillval
- 用来填充边界外面的值
函数 cvWarpPerspective 利用下面指定矩阵变换输入图像:
- 如果没有指定 CV_WARP_INVERSE_MAP , ,
- 否则,
要变换稀疏矩阵,使用 cxcore 中的函数 cvTransform 。
WarpPerspectiveQMatrix
用4个对应点计算透视变换矩阵
CvMat* cvWarpPerspectiveQMatrix( const CvPoint2D32f* src, const CvPoint2D32f* dst, CvMat* map_matrix );
- src
- 输入图像的四边形的4个点坐标 dst
- 输出图像的对应四边形的4个点坐标 map_matrix
- 输出的 3×3 矩阵
函数 cvWarpPerspectiveQMatrix 计算透视变换矩阵,使得:
(tix'i,tiy'i,ti)T=matrix•(xi,yi,1)T
其中 dst(i)=(x'i,y'i), src(i)=(xi,yi), i=0..3.
GetPerspectiveTransform
由四对点计算透射变换
CvMat* cvGetPerspectiveTransform( const CvPoint2D32f* src, const CvPoint2D32f* dst, CvMat* map_matrix );
#define cvWarpPerspectiveQMatrix cvGetPerspectiveTransform
- src
- 输入图像的四边形顶点坐标。 dst
- 输出图像的相应的四边形顶点坐标。 map_matrix
- 指向3×3输出矩阵的指针。
函数cvGetPerspectiveTransform计算满足以下关系的透射变换矩阵:

- 这里,dst(i) = (x'i,y'i),src(i) = (xi,yi),i = 0..3.
Remap
对图像进行普通几何变换
void cvRemap( const CvArr* src, CvArr* dst, const CvArr* mapx, const CvArr* mapy,
int flags=CV_INTER_LINEAR+CV_WARP_FILL_OUTLIERS, CvScalar fillval=cvScalarAll(0) );
src - 输入图像.
dst - 输出图像.
mapx - x坐标的映射 (32fC1 image).
mapy - y坐标的映射 (32fC1 image).
flags - 插值方法和以下开关选项的组合:
- CV_WARP_FILL_OUTLIERS - 填充边界外的像素. 如果输出图像的部分象素落在变换后的边界外,那么它们的值设定为 fillval。
fillval - 用来填充边界外面的值.
函数 cvRemap 利用下面指定的矩阵变换输入图像:
dst(x,y)<-src(mapx(x,y),mapy(x,y))
与其它几何变换类似,可以使用一些插值方法(由用户指定,译者注:同cvResize)来计算非整数坐标的像素值。
LogPolar
把图像映射到极指数空间
void cvLogPolar( const CvArr* src, CvArr* dst, CvPoint2D32f center, double M,
int flags=CV_INTER_LINEAR+CV_WARP_FILL_OUTLIERS );
src - 输入图像。
dst - 输出图像。
center - 变换的中心,输出图像在这里最精确。
M - 幅度的尺度参数,见下面公式。
flags - 插值方法和以下选择标志的结合
- CV_WARP_FILL_OUTLIERS -填充输出图像所有像素,如果这些点有和外点对应的,则置零。
- CV_WARP_INVERSE_MAP - 表示矩阵由输出图像到输入图像的逆变换,并且因此可以直接用于像素插值。否则,
- 函数从map_matrix中寻找逆变换。
fillval - 用于填充外点的值。
函数cvLogPolar用以下变换变换输入图像:
正变换 (CV_WARP_INVERSE_MAP 未置位):
dst(phi,rho)<-src(x,y)
逆变换 (CV_WARP_INVERSE_MAP 置位):
dst(x,y)<-src(phi,rho),
这里,
rho=M*log(sqrt(x2+y2)) phi=atan(y/x)
此函数模仿人类视网膜中央凹视力,并且对于目标跟踪等可用于快速尺度和旋转变换不变模板匹配。
Example. Log-polar transformation.
#include <cv.h>
#include <highgui.h>
int main(int argc, char** argv)
{ IplImage* src;
if( argc == 2 && (src=cvLoadImage(argv[1],1) != 0 )
{ IplImage* dst = cvCreateImage( cvSize(256,256), 8, 3 );
IplImage* src2 = cvCreateImage( cvGetSize(src), 8, 3 );
cvLogPolar( src, dst, cvPoint2D32f(src->width/2,src->height/2), 40, CV_INTER_LINEAR+CV_WARP_FILL_OUTLIERS );
cvLogPolar( dst, src2, cvPoint2D32f(src->width/2,src->height/2), 40, CV_INTER_LINEAR+CV_WARP_FILL_OUTLIERS+
CV_WARP_INVERSE_MAP );
cvNamedWindow( "log-polar", 1 ); cvShowImage( "log-polar", dst );
cvNamedWindow( "inverse log-polar", 1 ); cvShowImage( "inverse log-polar", src2 );
cvWaitKey(); } return 0; }
相关文章:

centos 6.* 修改时间
一、查看Centos的时区和时间 1、使用date命令查看Centos时区 [rootVM_centos ~]# date -R Mon, 26 Mar 2018 19:14:03 0800 2、查看clock系统配置文件 [rootVM_centos ~]# cat /etc/sysconfig/clock ZONE"Asia/Shanghai" 3、查看系统的硬件时间,即BIOS时间…

别光发Paper,搞点实际问题
文 / LVS话说几个月前,我参加了一场学术大会,台上的教授不是北大、清华就是浙大、上交大,几位教授不约而同的吐槽招通信、算法和编解码的学生太难了。为什么呢?原来,先不比金融,仅仅与同是IT领域的AI专业就…
spring mvc文件上传小例子
spring mvc文件上传小例子 1.jsp页面 <%page contentType"text/html;charsetUTF-8"%> <%page pageEncoding"UTF-8"%> <% taglib prefix"c" uri"http://java.sun.com/jsp/jstl/core"%> <% taglib prefix"fmt…

解密Kernel:为什么适用任何机器学习算法?
作者 | Marin Vlastelica Pogančić译者 | 陆离编辑 | 一一出品 | AI科技大本营(ID:rgznai100)机器学习中Kernel的秘密(一)本文探讨的不是关于深度学习方面的,但可能也会涉及一点儿,主要是因为…
03-Java的基础语法
一个Java程序可以认为是一系列对象的集合,而这些对象通过调用彼此的方法来协同工作。下面简要介绍下类、对象、方法和实例变量的概念。 对象:对象是类的一个实例,有状态和行为。例如,一条狗是一个对象,它的状态有&…
图像处理-仿射变换 AffineTransform
转自:http://fairywangyutang.blog.sohu.com/146834554.html AffineTransform类描述了一种二维仿射变换的功能,它是一种二维坐标到二维坐标之间的线性变换,保持二维图形的“平直性”(译注:straightness,即变…
以前初学php用的分页函数
page.php <?php /* *http://www.iiwnet.com/php/ PHP学习 * */ function _PAGEFT($totle, $displaypg 20, $url ) { global $page, $firstcount, $pagenav, $_SERVER; $GLOBALS["displaypg"] $displaypg; if (!$page) $page 1; if (!$url) { $url $_SERVER[…
深度有趣 | 27 服饰关键点定位
简介 介绍如何使用CPM(Convolutional Pose Machines)实现服饰关键点定位 原理 关键点定位是一类常见而有用的任务,某种意义上可以理解为一种特征工程 人脸关键点定位,可用于人脸识别、表情识别人体骨骼关键点定位,可用…

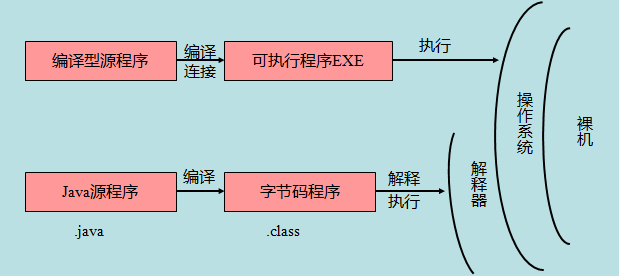
有答案了!一张图告诉你到底学Python还是Java!你咋看?
2019年,该学Java还是Python?不,实际上应该这样问:都9102年了,难道有谁不想成为Python程序员吗?作为“常青树大佬”Java 和“新晋大佬”Python ,经常被人拿来对比,对于刚开始起步学习…
图像二值化----otsu(最大类间方差法、大津算法)(二)
转自:http://blog.stevenwang.name/ostu-threshold-56002.html OTSU算法也称最大类间差法,有时也称之为大津算法,被认为是图像分割中阈值选取的最佳算法,计算简单,不受图像亮度和对比度的影响,因此在数字图…
android同时使用多个library时的问题
剧情是这样,我的app要使用两个library,如:LibraryA,LibraryB。这两个库又都需要support.v4.jar。 由于加载的时间不同,所以两个support.v4.jar不同,出错的提示如下: [2012-09-28 16:37:22 - ] F…
C#版 - Leetcode49 - 字母异位词分组 - 题解
C#版 - Leetcode49 - 字母异位词分组 - 题解 Leetcode49.Group Anagrams 在线提交:https://leetcode.com/problems/group-anagrams/ 题目描述 给定一个字符串数组,将字母异位词组合在一起。字母异位词指字母相同,但排列不同的字符串。 示例: 输入: [&quo…

来学习几个简单的Hive函数吧!
作者 | 石晓文转载自小小挖掘机(ID:wAIsjwj)咳咳,今天来介绍一下几个Hive函数吧,先放一张我登哥划水的照片,希望大家也做一只自由的鱼儿,在知识的海洋里游呀游,嘻嘻!今天我们来介绍几…
OpenCV编程案例:使用轮廓函数检测连通区域
转自:http://www.aiseminar.cn/bbs/thread-617-1-1.html 此案例位于CXCORE中cvDrawContours函数介绍部分给出。此程序首先载入一个二值图像文件,然后使用函数再次二值化确认。接着使用cvFindContours找到轮廓,然后使用填充方式绘制轮廓线内部…

[译]Web Inspector开始支持CSS区域
最近,开发人员和设计师们可以在WebKit中尝试使用CSS区域特性了,我们认为是时候给他们一些开发工具了.最新版本的Chrome Canary中的web inspector现在已经支持下面这些功能: 查找文档中所有的命名流.显示每个命名流的内容和区域链.高亮页面中的CSS区域,就像是把鼠标放在web insp…

这或许是东半球分析十大排序算法最好的一篇文章
作者 | 不该相遇在秋天转载自五分钟学算法(ID:CXYxiaowu)前言本文全长 14237 字,配有 70 张图片和动画,和你一起一步步看懂排序算法的运行过程。预计阅读时间 47 分钟,强烈建议先收藏然后通过电脑端进行阅读。No.1 冒泡…
opencv使用cvFindContours提取联通域
转自:http://hi.baidu.com/irmosgarden/blog/item/8ce0174c54b307fad72afcbc.html // m_imgFeature为黑白目标图像,白色为前景,黑色为背景 // 注意此函数会修改m_imgFeature内容。若其不可更改,应另建立副本 // 1. count contou…

朱晔的互联网架构实践心得S1E9:架构评审一百问和设计文档五要素
朱晔的互联网架构实践心得S1E9:架构评审一百问和设计文档五要素 【下载文本PDF进行阅读】 本文我会来说说我认为架构评审中应该看的一些点,以及我写设计文档的一些心得。助你在架构评审中过五关斩六将,助你写出能让人收藏点赞的设计文档。 技…
Mail Archiving Expert电子邮件归档专家
概况作为企业往来最通用的交流工具,企业中有95%以上的文件都是通过邮件来传递与沟通,但是一旦当邮件服务罢工,影响的不仅仅是企业信息交流无法正确与及时的传达,更可能影响企业与客户之间的交易,其后果更是不堪设想&am…
C++中MessageBox的常见用法
转自:http://blog.csdn.net/qiumingbo/archive/2007/05/25/1625324.aspxMessageBox用法消息框是个很常用的控件,属性比较多,本文列出了它的一些常用方法,及指出了它的一些应用场合。1.MessageBox("这是一个最简单的消息框&am…
对标Mobileye!百度Apollo公布L4级自动驾驶纯视觉解决方案Apollo Lite
美国当地时间6月16日-20日,全球计算机视觉及模式识别领域顶级学术会议CVPR 2019(Conference on Computer Vision and Pattern Recognition)于美国长滩召开。百度Apollo在CVPR 2019公开了自动驾驶纯视觉城市道路闭环解决方案--百度Apollo Lite…
后台服务项目的白盒测试之旅
本文来自阿网易云社区作者:孙婷婷白盒测试起因17年下半年我开始介入部门新项目的服务v2版本的功能测试。刚接手项目时,感到十分头疼,首先它不像我刚接触测试时做的to C端项目,主要是页面展示操作,黑盒测试足够…

【自然框架 NatureFW】里的两种“映射”方式
自然框架里面采用了两种映射关系,一个是流行的ORM,另一是非主流的“CCM ” (我自己想的,呵呵)。 先说一下ORM。ORM是O和R的映射关系。也看到很多人写关于ORM的文章,发现好像有个误区。这个误区就是&#x…
ordfilt2函数功能说明
转自:http://www.ilovematlab.cn/thread-91331-1-1.html ordfilt2函数在MATLAB图像处理工具箱中提供了二维统计顺序滤波函数ordfilt2函数。二维统计顺序滤波是中值滤波的推广,对于给定的n个数值{al ,a2,...,an},将它们…
今晚直播写代码|英伟达工程师亲授如何加速YOLO目标检测
NVIDIA TensorRT是一种高性能深度学习推理优化器和运行时加速库,可以为深度学习推理应用程序提供低延时和高吞吐量。通过TensorRT,开发者可以优化神经网络模型,以高精度校对低精度,最后将模型部署到超大规模数据中心、嵌入式平台或…
TensorFlow Lite:TensorFlow在移动设备与嵌入式设备上的轻量级跨平台解决方案 | Google 开发者大会 2018...
Google 开发者大会 (Google Developer Days,简称 GDD) 是展示 Google 最新开发者产品和平台的全球盛会,旨在帮助你快速开发优质应用,发展和留住活跃用户群,充分利用各种工具获得更多收益。2018 Google 开发者大会于 9 月 20 日和 …
热烈庆祝“mysql 集群数据库架构成功”
坚持了两周,终于在linux下把mysql集群数据库给架起来了!下面简单说明下集群数据库原理 第一:集群数据库分MGM,NDBD,SQL 其中MGM是相当于“中央政府”,维持NDBD,SQL等服务器的之间的关系的 NDBD是数据存储的分布化&…

352万帧标注图片,1400个视频,亮风台推最大单目标跟踪数据集
CVPR 2019期间,专注于AR技术,整合软硬件的人工智能公司亮风台公开大规模单目标跟踪高质量数据集LaSOT,包含超过352万帧手工标注的图片和1400个视频,这也是目前为止最大的拥有密集标注的单目标跟踪数据集。论文《LaSOT: A High-qua…
centos7中nfs文件系统的使用
需求:file01:1.1.1.1(内网ip 172.20.103.212),file02:2.2.2.2(内网ip 172.20.103.211) 这两台机器的 /dev/mapper/myvg-mylv /data 这个盘都挂载到 video01 47.254.78.171, video02 47.254.83.81 这两台机器上即将file01和file02的/data目录都挂载到vid…
在图像变换中用最小二乘法求解仿射变换参数
设原图像为f(x,y),畸变后的图像为F(X,Y),要将F(X,Y)恢复为f(x,y),就是要找到(X,Y)坐标与(x,y)坐标的转换关系,这个转换关系称为坐标变换,表示为(x,y)T(X,Y)。 景物在成像过程中产生的扭曲,会使图像的比例失…