对标Mobileye!百度Apollo公布L4级自动驾驶纯视觉解决方案Apollo Lite
美国当地时间6月16日-20日,全球计算机视觉及模式识别领域顶级学术会议CVPR 2019(Conference on Computer Vision and Pattern Recognition)于美国长滩召开。百度Apollo在CVPR 2019公开了自动驾驶纯视觉城市道路闭环解决方案--百度Apollo Lite。
CVPR作为行业最顶级的研究型会议,每年被收录的论文均来自计算机视觉领域顶级团队,代表着国际最前沿的科研技术,并指引行业未来发展的研究方向。在当地时间6月17日,百度Apollo在CVPR上举办技术讲座,Apollo技术委员会主席王亮就L4级全自动驾驶(Fully Autonomous Driving)环境感知技术方案进行了讲解,并公开了环视视觉解决方案百度Apollo Lite。

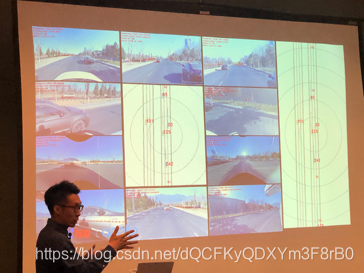
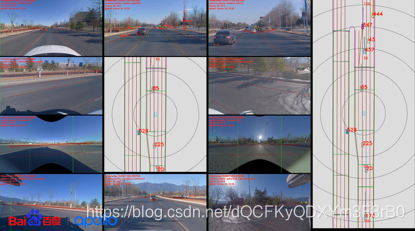
王亮介绍,Apollo Lite是目前国内唯一的城市道路L4级视觉感知解决方案,能够支持对10路摄像头、200帧/秒数据量的并行处理,单视觉链路最高丢帧率能够控制在5‰以下,实现全方位360°实时环境感知,前向障碍物的稳定检测视距达到240米。王亮表示,经过前期的技术研发投入和2019年上半年的路测迭代,依靠这套10相机的感知系统,百度无人车已经可以在城市道路上实现不依赖高线数旋转式激光雷达的端到端闭环自动驾驶。

据了解,Apollo Lite已经在北京稻香湖等多地多路段落地测试。相比旋转式激光雷达感知方案,视觉感知方案价格低且便于获得。这套低成本近车规级环视感知方案也能够降级支持ADAS辅助驾驶应用,创造更多有价值的应用场景,将ADAS产品的能力提升到一个新的高度,为企业、开发者们提供了一个低价、优质的自动驾驶解决方案。
摄像头是相对成熟的传感器,除具备轻巧低成本和符合车规的优势外,高分辨率高帧率(成像频率)的成像技术发展趋势意味着图像内蕴含的环境信息更丰富,同时视频数据也和人眼感知的真实世界最为相似,但和三维点云数据相比,二维图像中的信息更难挖掘,需要设计更强大的算法、大量数据的积累和更长期的研发投入。

王亮表示,百度Apollo始终坚持多传感器融合的技术路线。在L4级自动驾驶传感器选型上,激光雷达和摄像头不是排它的的也不是单纯的从属和互补关系。从安全性考虑,二者具备相同的重要性和不可替代性,缺一不可。

现今很多传感器融合的方案设计较为复杂,技术人员往往从快速解决问题的角度出发设计算法,这个过程中难免避重就轻的利用异构数据各自的优势进行缺陷互补从而绕过困难的问题。基于这种思路设计的多传感器融合方案虽然能够在短期规避单传感器方案难以解决的问题,长远看,数据和策略间深度耦合的设计不利于为环境感知系统提供真正意义上的冗余(true redundancy)。传感器融合意味着多套能够独立支撑全自动驾驶的感知系统强强联手,独立工作相互校验,最大概率的保证感知结果的准确性和完备性。王亮强调,百度下决心投入资源研发纯视觉感知解决方案并不意味着放弃现有基于激光雷达的技术路线,而是在技术实践过程中充分意识到无人驾驶系统true redundancy的必要性,决定通过压强环视视觉技术来夯实多传感器融合感知框架。在传统激光雷达为主,视觉为辅的传统融合策略中,视觉感知自身的问题和缺陷在雷达感知的掩盖下暴露不够充分。今天通过Apollo Lite打磨迭代的纯视觉技术正在持续反哺百度坚持的多传感器融合解决方案,提升无人驾驶系统的鲁棒性和安全性。
相关文章:
后台服务项目的白盒测试之旅
本文来自阿网易云社区作者:孙婷婷白盒测试起因17年下半年我开始介入部门新项目的服务v2版本的功能测试。刚接手项目时,感到十分头疼,首先它不像我刚接触测试时做的to C端项目,主要是页面展示操作,黑盒测试足够…

【自然框架 NatureFW】里的两种“映射”方式
自然框架里面采用了两种映射关系,一个是流行的ORM,另一是非主流的“CCM ” (我自己想的,呵呵)。 先说一下ORM。ORM是O和R的映射关系。也看到很多人写关于ORM的文章,发现好像有个误区。这个误区就是&#x…

ordfilt2函数功能说明
转自:http://www.ilovematlab.cn/thread-91331-1-1.html ordfilt2函数在MATLAB图像处理工具箱中提供了二维统计顺序滤波函数ordfilt2函数。二维统计顺序滤波是中值滤波的推广,对于给定的n个数值{al ,a2,...,an},将它们…
今晚直播写代码|英伟达工程师亲授如何加速YOLO目标检测
NVIDIA TensorRT是一种高性能深度学习推理优化器和运行时加速库,可以为深度学习推理应用程序提供低延时和高吞吐量。通过TensorRT,开发者可以优化神经网络模型,以高精度校对低精度,最后将模型部署到超大规模数据中心、嵌入式平台或…
TensorFlow Lite:TensorFlow在移动设备与嵌入式设备上的轻量级跨平台解决方案 | Google 开发者大会 2018...
Google 开发者大会 (Google Developer Days,简称 GDD) 是展示 Google 最新开发者产品和平台的全球盛会,旨在帮助你快速开发优质应用,发展和留住活跃用户群,充分利用各种工具获得更多收益。2018 Google 开发者大会于 9 月 20 日和 …
热烈庆祝“mysql 集群数据库架构成功”
坚持了两周,终于在linux下把mysql集群数据库给架起来了!下面简单说明下集群数据库原理 第一:集群数据库分MGM,NDBD,SQL 其中MGM是相当于“中央政府”,维持NDBD,SQL等服务器的之间的关系的 NDBD是数据存储的分布化&…

352万帧标注图片,1400个视频,亮风台推最大单目标跟踪数据集
CVPR 2019期间,专注于AR技术,整合软硬件的人工智能公司亮风台公开大规模单目标跟踪高质量数据集LaSOT,包含超过352万帧手工标注的图片和1400个视频,这也是目前为止最大的拥有密集标注的单目标跟踪数据集。论文《LaSOT: A High-qua…
centos7中nfs文件系统的使用
需求:file01:1.1.1.1(内网ip 172.20.103.212),file02:2.2.2.2(内网ip 172.20.103.211) 这两台机器的 /dev/mapper/myvg-mylv /data 这个盘都挂载到 video01 47.254.78.171, video02 47.254.83.81 这两台机器上即将file01和file02的/data目录都挂载到vid…
在图像变换中用最小二乘法求解仿射变换参数
设原图像为f(x,y),畸变后的图像为F(X,Y),要将F(X,Y)恢复为f(x,y),就是要找到(X,Y)坐标与(x,y)坐标的转换关系,这个转换关系称为坐标变换,表示为(x,y)T(X,Y)。 景物在成像过程中产生的扭曲,会使图像的比例失…
showModalDialog关闭子窗口,并刷新父窗口
一、用法:window.showModalDialog(url,args,dialogWidth650px;scrollno;dialogHeight250px;statusno; ); 二、关闭子窗口,并刷新父窗口 想在showModalDialog打开的窗口中提交表单且不打开新窗口 只需在打开的页面的<head>中加入<base target&qu…
cvDrawContours:在图像上绘制外部和内部轮廓
转自:http://www.aiseminar.cn/html/18/t-618.html?action-uchimage 函数cvDrawContours用于在图像上绘制外部和内部轮廓。当thickness > 0 时,绘制轮廓线;否则填充由轮廓包围的部分。 void cvDrawContours( CvArr *img, CvSeq* contour,…

Python最抢手、Go最有前途,7000位程序员揭秘2019软件开发现状
作者 | 屠敏 整理报告来源 | JetBrains转载自 CSDN(ID:CSDNnews)互联网的下半场,科技公司为面对更加严峻的竞争环境,越来越重视开源节流。而对于身处其中且撑起 IT 半边天的技术人,如今如何了?从…

main函数参数
参考:Where Does GCC Look to Find its Header Files? 命令行参数 VS 程序参数 ./a.out 1 2 3 4 5 6 1 2 3 4 5 6是程序参数,是传给a.out这个程序处理的,main里面的argv来接收 ./a.out 1 2 3 4 5 6完整的这一串才是命令行参数 代码演示 如下…

转载 load-on-startup的用法
转载于:http://www.ituring.com.cn/article/50477 Web.xml中的Servlet中的配置: <servlet><servlet-name>createBlog</servlet-name><servlet-class>com.cnblogs.CreateBlog</servlet-class><load-on-startup>0</load-on-s…

商汤62篇论文入选CVPR 2019,一览五大方向最新研究进展
(图源自视觉中国)作为与ICCV、ECCV并称为计算机视觉领域三大国际会议之一,本届CVPR大会共收到5265篇有效投稿,接收论文1300篇,接收率为25.2%。商汤科技CVPR 2019录取论文在多个领域实现突破作为国内CV领域的明星公司&a…
cvSaveImage保存图像
转自:http://blog.csdn.net/luhuillll/archive/2009/10/28/4739471.aspx opencv保存图象直接使用cvSaveImage,这个函数.但是windows位图的图象格式是RGBt格式,而opencv的图象存储格式是BGR. 这样导致保存的图象失真.在windows下查看图象好象变绿色了.所以在保存图象…
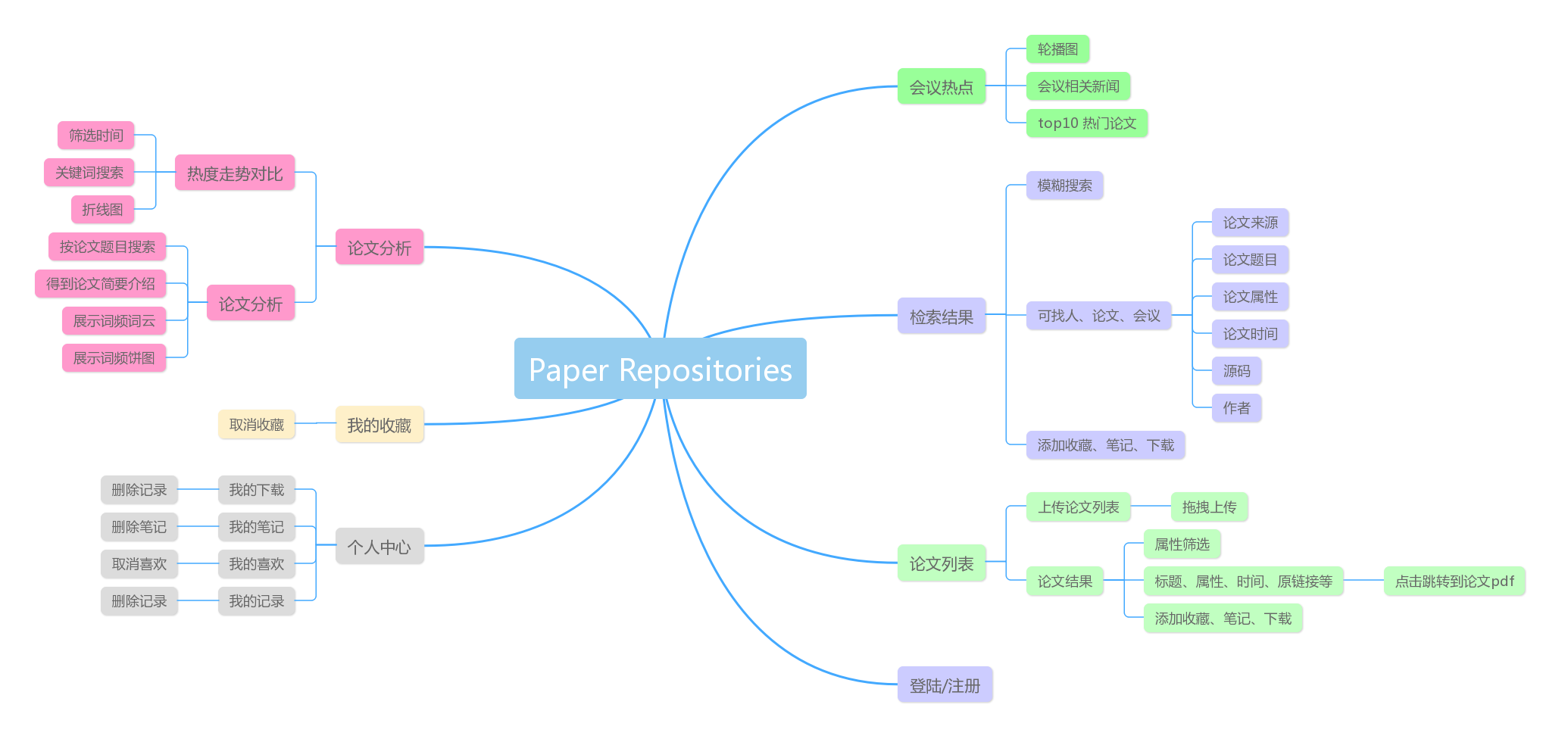
软工实践原型设计——PaperRepositories
软工实践原型设计——PaperRepositories 写在前面 本次作业链接队友(031602237吴杰婷)博客链接pdf文件地址原型设计地址(加载有点慢...)结对成员:031602237吴杰婷 & 031602636许舒玲原型设计工具:Axure RP 8PSP表格 PSP3.1Personal Software Process…
nagios+sendmail配置
以下为自己安装测试过的,如果有问题,大家一起讨论 系统环境:centos6.2 64位 最小化安装 一 安装nagios 见附件:nagios官方文档(nagios_nrpe20120929_web.pdf) 二 安装配置sendmail 我用hotmail邮箱接收nagi…

真正的博士是如何参加AAAI, ICML, ICLR等AI顶会的?
(图源自视觉中国)整理 | 一一出品 | AI科技大本营(ID:rgznai100)源于对学术的热爱,让很多人走上了博士这条求索之路,而热爱会让他们勤奋付出,勤奋让他们成为佼佼者。在刚刚过去的 ICML 大会上&a…
matlab图像滤波
转自:http://hi.baidu.com/wang%5Fpw/blog/item/36354a637ac87b48eaf8f879.html clc; clear all; Iimread(eight.tif); % %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % %用中值滤波,多维滤波,使用中心为-4,-8的拉普 % %拉…

2018你不得不看的国内CRM软件排行榜
2018你不得不看的国内CRM软件排行榜短短几年时间,CRM在中国的发展就已经非常迅猛,现在已经成为了管理软件增长最快的产业。在我们总结的CRM软件排行榜中,腾讯企点的CRM软件赫然摆在前列。而CRM在中国中小企业已经突破千万家,占全国…
二维物体形状识别方法比较
二维物体形状识别方法比较 摘 要 针对模式识别中二维物体的形状识别问题,以二值图像中的物体形状为主要研究对象,依次从特征提取、分类器设计两个主要层面对形状识别方法进行了全面综述,并分析了国内外研究现状,特别是近年来所取…
个人知识管理的10个误区
100个人,有100个对个人知识管理的理解。 当我们热烈的讨论“个人知识管理”的时候,也许我们讨论的根本不是一个东西:你理解的个人知识管理和他理解的个人知识管理根本不同。 拙作《你的知识需要管理》试图去建立一个个人知识管理内容的框架&a…
关于比特币现金升级问题讨论不断升温
过去几周,比特币现金的支持者一直在讨论定于今年11月15日推出的硬叉。大多数人都明白,目前有两个阵营有着完全不同的愿景。看来双方在短期内不会达成妥协。最近,随着时间的推移,双方都在测试某些特性,并发表了关于特定…
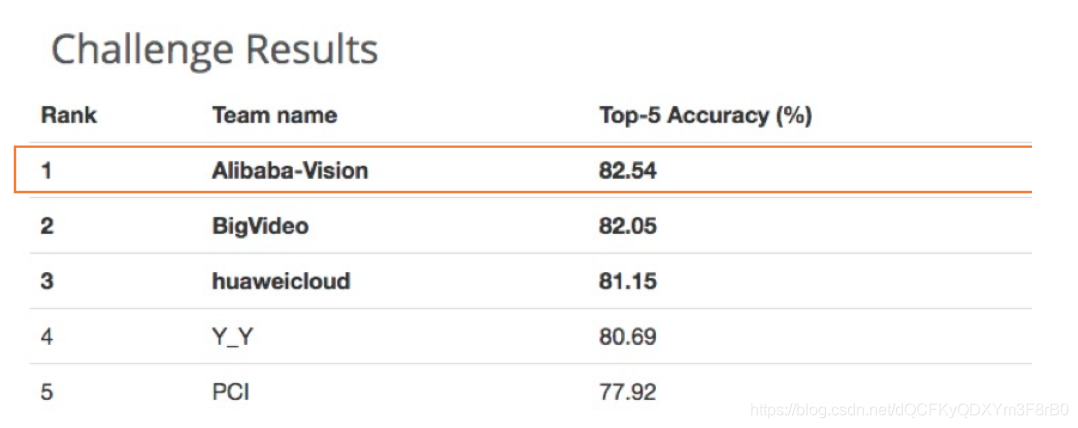
阿里AI摘图像识别竞赛WebVision桂冠,万物识别准确率创世界纪录
近日,第三届图像识别竞赛WebVision中,阿里AI击败了全世界150多支参赛队伍,获得冠军。 WebVision由谷歌、美国卡耐基梅隆大学、苏黎世联邦理工大学等机构联合全球视觉技术领域顶级学术会议CVPR发起,是目前图像识别领域最权威的竞赛…

做人工智能必看的45篇论文 | 附下载地址
而AI领域的发展会是IT中最快的。我们所看到的那些黑客技,其后面无不堆积了大量的论文。而且都是最新、最前沿的论文。从某种调度来讲,他们所用的技术跟书籍里的内容确实不是一个时代。要想与时俱进,就必须改变思路——从论文入手。今天给大家…

C# Socket编程(5)使用TCP Socket
TCP 协议(Transmission Control Protocol,传输控制协议)是TCP/IP体系中面向连接(connection oriented)的传输层(transport layer),TCP协议能够检测和恢复IP层提供的主机到主机的信道中可能发生的报文丢失、重复以及其他错误。由于TCP协议是一种面向连接协议:在使用它…
opencv 检测直线、线段、圆、矩形
转自:http://blog.csdn.net/byxdaz/archive/2009/12/01/4912136.aspx 检测直线:cvHoughLines,cvHoughLines2 检测圆:cvHoughCircles 检测矩形:opencv中没有对应的函数,下面有段代码可以检测矩形ÿ…
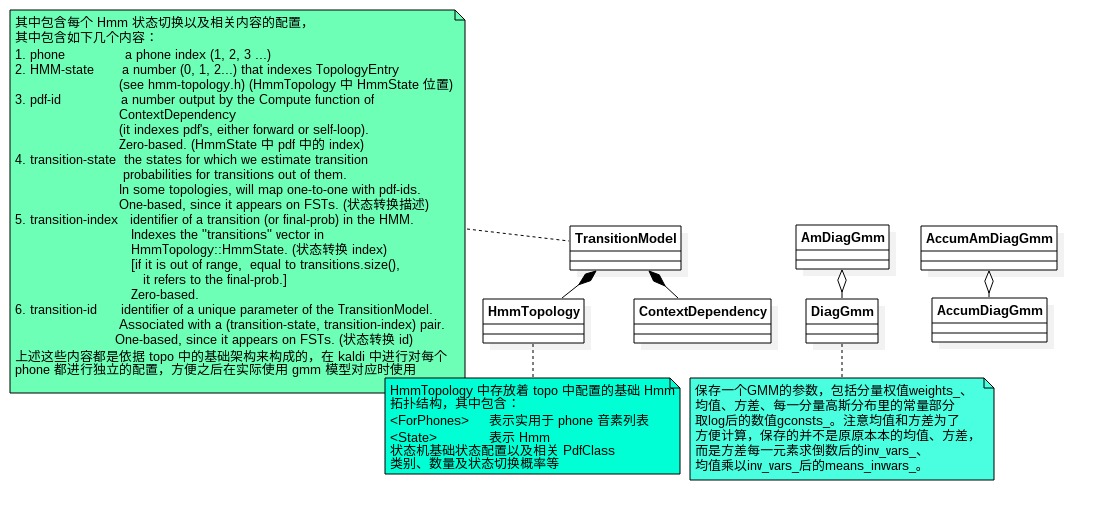
kaldi 源码分析(十) - gmm-init-mono.c分析
一直没有搞明白 hmm-gmm 之间是通过什么联系起来的,花了些时间查代码,看到最直观联系的就是 gmm-init-mono 工具。 gmm-init-mono 基础类通过上述看到,主要的配置都是 在 topo 文件中, 这里需要将一些常见的名称理解下来,这里直接…
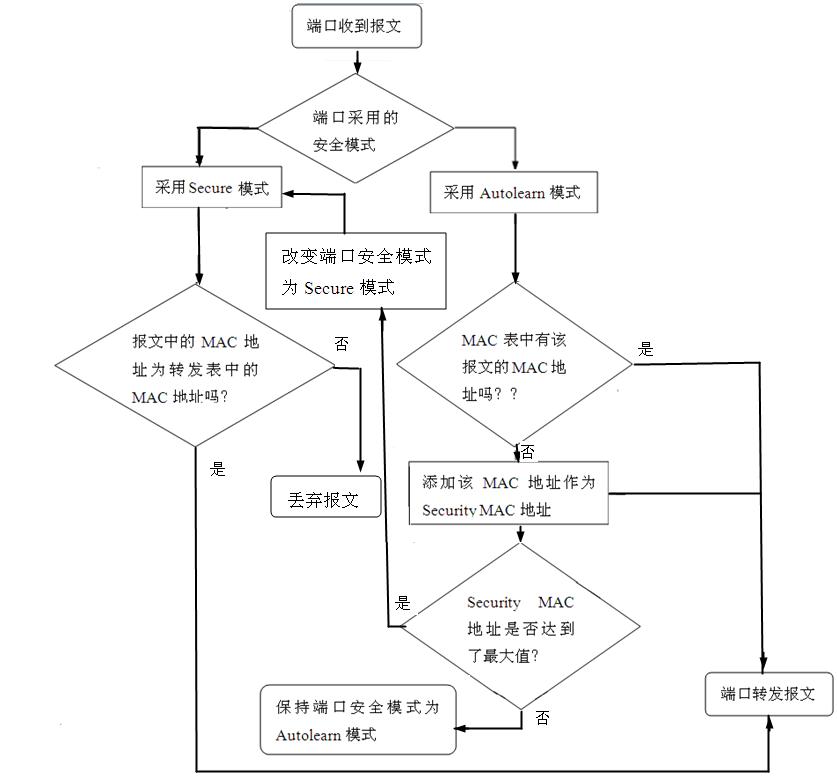
你最需要了解的H3C交换机端口安全模式
以下内容摘自正在全国热销的《Cisco/H3C交换机高级配置与管理技术手册》一书(畅销经典——《Cisco/H3C交换机配置与管理完全手册》(第二版)的配套姊妹篇)。目前京东网和卓越网上都有“满150元减50元,满300元减100元”的…