CUDA Samples: matrix multiplication(C = A * B)
以下CUDA sample是分别用C++和CUDA实现的两矩阵相乘运算code即C= A*B,CUDA中包含了两种核函数的实现方法,第一种方法来自于CUDA Samples\v8.0\0_Simple\matrixMul,第二种采用普通的方法实现,第一种方法较快,但有些复杂,速度上约为第二种的1.3倍,并对其中使用到的CUDA函数进行了解说,各个文件内容如下:
funset.cpp:
#include "funset.hpp"
#include <random>
#include <iostream>
#include <vector>
#include <memory>
#include <string>
#include <algorithm>
#include "common.hpp"
#include <opencv2/opencv.hpp>int test_matrix_mul()
{// Matrix multiplication: C = A * B// 矩阵A、B的宽、高应是32的整数倍const int rowsA{ 352 }, colsA{ 672 }, rowsB = colsA, colsB{ 384 };std::unique_ptr<float[]> A(new float[colsA*rowsA]);std::unique_ptr<float[]> B(new float[colsB*rowsB]);std::unique_ptr<float[]> C1(new float[rowsA*colsB]);std::unique_ptr<float[]> C2(new float[rowsA*colsB]);generator_random_number(A.get(), colsA*rowsA, -1.f, 1.f);generator_random_number(B.get(), colsB*rowsB, -1.f, 1.f);float elapsed_time1{ 0.f }, elapsed_time2{ 0.f }; // millisecondsint ret = matrix_mul_cpu(A.get(), B.get(), C1.get(), colsA, rowsA, colsB, rowsB, &elapsed_time1);if (ret != 0) PRINT_ERROR_INFO(matrix_mul_cpu);ret = matrix_mul_gpu(A.get(), B.get(), C2.get(), colsA, rowsA, colsB, rowsB, &elapsed_time2);if (ret != 0) PRINT_ERROR_INFO(matrix_mul_gpu);int count{ 0 };for (int i = 0; i < rowsA*colsB; ++i) {if (count > 100) return -1;if (fabs(C1[i] - C2[i]) > EPS_) {fprintf(stderr, "Result verification failed at element %d, C1: %f, C2: %f\n",i, C1[i], C2[i]);++count;}}fprintf(stderr, "test matrix mul: cpu run time: %f ms, gpu run time: %f ms\n", elapsed_time1, elapsed_time2);return 0;
}#include "funset.hpp"
#include <vector>
#include <chrono>
#include "common.hpp"int matrix_mul_cpu(const float* A, const float* B, float* C, int colsA, int rowsA, int colsB, int rowsB, float* elapsed_time)
{auto start = std::chrono::steady_clock::now();CHECK(colsA == rowsB);for (int y = 0; y < rowsA; ++y) {for (int x = 0; x < colsB; ++x) {float sum{ 0.f };for (int t = 0; t < colsA; ++t) {sum += A[y * colsA + t] * B[t * colsB + x];}C[y * colsB + x] = sum;}}auto end = std::chrono::steady_clock::now();auto duration = std::chrono::duration_cast<std::chrono::nanoseconds>(end - start);*elapsed_time = duration.count() * 1.0e-6;return 0;
}#include "funset.hpp"
#include <iostream>
#include <cuda_runtime.h> // For the CUDA runtime routines (prefixed with "cuda_")
#include <device_launch_parameters.h>
#include "common.hpp"// reference: C:\ProgramData\NVIDIA Corporation\CUDA Samples\v8.0\0_Simple\matrixMul
/* __global__: 函数类型限定符;在设备上运行;在主机端调用,计算能力3.2及以上可以在
设备端调用;声明的函数的返回值必须是void类型;对此类型函数的调用是异步的,即在
设备完全完成它的运行之前就返回了;对此类型函数的调用必须指定执行配置,即用于在
设备上执行函数时的grid和block的维度,以及相关的流(即插入<<< >>>运算符);
a kernel,表示此函数为内核函数(运行在GPU上的CUDA并行计算函数称为kernel(内核函
数),内核函数必须通过__global__函数类型限定符定义);*/
template <int BLOCK_SIZE>
__global__ static void matrix_mul(const float* A, const float* B, float* C, int wA, int wB)
{/* gridDim: 内置变量,用于描述线程网格的维度,对于所有线程块来说,这个变量是一个常数,用来保存线程格每一维的大小,即每个线程格中线程块的数量.一个grid最多只有二维,为dim3类型;blockDim: 内置变量,用于说明每个block的维度与尺寸.为dim3类型,包含了block在三个维度上的尺寸信息;对于所有线程块来说,这个变量是一个常数,保存的是线程块中每一维的线程数量;blockIdx: 内置变量,变量中包含的值就是当前执行设备代码的线程块的索引;用于说明当前thread所在的block在整个grid中的位置,blockIdx.x取值范围是[0,gridDim.x-1],blockIdx.y取值范围是[0, gridDim.y-1].为uint3类型,包含了一个block在grid中各个维度上的索引信息;threadIdx: 内置变量,变量中包含的值就是当前执行设备代码的线程索引;用于说明当前thread在block中的位置;如果线程是一维的可获取threadIdx.x,如果是二维的还可获取threadIdx.y,如果是三维的还可获取threadIdx.z;为uint3类型,包含了一个thread在block中各个维度的索引信息 */// Block indexint bx = blockIdx.x;int by = blockIdx.y;// Thread indexint tx = threadIdx.x;int ty = threadIdx.y;// Index of the first sub-matrix of A processed by the blockint aBegin = wA * BLOCK_SIZE * by;// Index of the last sub-matrix of A processed by the blockint aEnd = aBegin + wA - 1;// Step size used to iterate through the sub-matrices of Aint aStep = BLOCK_SIZE;// Index of the first sub-matrix of B processed by the blockint bBegin = BLOCK_SIZE * bx;// Step size used to iterate through the sub-matrices of Bint bStep = BLOCK_SIZE * wB;// Csub is used to store the element of the block sub-matrix that is computed by the threadfloat Csub = 0;// Loop over all the sub-matrices of A and B required to compute the block sub-matrixfor (int a = aBegin, b = bBegin; a <= aEnd; a += aStep, b += bStep) {/* __shared__: 变量类型限定符;使用__shared__限定符,或者与__device__限定符连用,此时声明的变量位于block中的共享存储器空间中,与block具有相同的生命周期,仅可通过block内的所有线程访问;__shared__和__constant__变量默认为是静态存储;在__shared__前可以加extern关键字,但表示的是变量大小由执行参数确定;__shared__变量在声明时不能初始化;可以将CUDA C的关键字__shared__添加到变量声明中,这将使这个变量驻留在共享内存中;CUDA C编译器对共享内存中的变量与普通变量将分别采取不同的处理方式 */// Declaration of the shared memory array As used to store the sub-matrix of A__shared__ float As[BLOCK_SIZE][BLOCK_SIZE];// Declaration of the shared memory array Bs used to store the sub-matrix of B__shared__ float Bs[BLOCK_SIZE][BLOCK_SIZE];// Load the matrices from device memory to shared memory; each thread loads one element of each matrixAs[ty][tx] = A[a + wA * ty + tx];Bs[ty][tx] = B[b + wB * ty + tx];/* __syncthreads: 对线程块中的线程进行同步;CUDA架构将确保,除非线程块中的每个线程都执行了__syncthreads(),否则没有任何线程能执行__syncthreads()之后的指令;在同一个block中的线程通过共享存储器(sharedmemory)交换数据,并通过栅栏同步(可以在kernel函数中需要同步的位置调用__syncthreads()函数)保证线程间能够正确地共享数据;使用clock()函数计时,在内核函数中要测量的一段代码的开始和结束的位置分别调用一次clock()函数,并将结果记录下来。由于调用__syncthreads()函数后,一个block中的所有thread需要的时间是相同的,因此只需要记录每个block执行需要的时间就行了,而不需要记录每个thread的时间 */// Synchronize to make sure the matrices are loaded__syncthreads();/* reference:https://devblogs.nvidia.com/parallelforall/new-compiler-features-cuda-8/https://stackoverflow.com/questions/22278631/what-does-pragma-unroll-do-exactly-does-it-affect-the-number-of-threads/22279341编译器默认情况下将循环展开小的次数,#pragma unroll能够指定循环以多少次展开(程序员必须保证按这个展开是正确的),pragma unroll 后必须紧接着处理的循环,可选择在其后接一个数字,指定必须展开多少次循环,#pragma unroll 1 表示禁止编译器将循环展开。如果没指定次数,对于常数次的循环,循环将完全展开,对于不确定次数的循环,循环将不会展开。*/
#pragma unroll// Multiply the two matrices together; each thread computes one element of the block sub-matrixfor (int k = 0; k < BLOCK_SIZE; ++k) {Csub += As[ty][k] * Bs[k][tx];}// Synchronize to make sure that the preceding computation is done before loading two new// sub-matrices of A and B in the next iteration__syncthreads();}// Write the block sub-matrix to device memory; each thread writes one elementint c = wB * BLOCK_SIZE * by + BLOCK_SIZE * bx;C[c + wB * ty + tx] = Csub;
}__global__ static void matrix_mul(const float* A, const float* B, float* C, int colsA, int rowsA, int colsB, int rowsB)
{int x = threadIdx.x + blockIdx.x * blockDim.x;int y = threadIdx.y + blockIdx.y * blockDim.y;int offset = x + y * blockDim.x * gridDim.x;float sum{ 0.f };for (int t = 0; t < colsA; ++t) {sum += A[y * colsA + t] * B[t * colsB + x];}C[offset] = sum;
}int matrix_mul_gpu(const float* A, const float* B, float* C, int colsA, int rowsA, int colsB, int rowsB, float* elapsed_time)
{CHECK(colsA == rowsB);/* cudaEvent_t: CUDA event types,结构体类型, CUDA事件,用于测量GPU在某个任务上花费的时间,CUDA中的事件本质上是一个GPU时间戳,由于CUDA事件是在GPU上实现的,因此它们不适于对同时包含设备代码和主机代码的混合代码计时*/cudaEvent_t start, stop;// cudaEventCreate: 创建一个事件对象,异步启动cudaEventCreate(&start);cudaEventCreate(&stop);// cudaEventRecord: 记录一个事件,异步启动,start记录起始时间cudaEventRecord(start, 0);size_t lengthA{ colsA * rowsA * sizeof(float) }, lengthB{ colsB * rowsB * sizeof(float) };size_t lengthC{ rowsA * colsB * sizeof(float) };float *d_A{ nullptr }, *d_B{ nullptr }, *d_C{ nullptr };// cudaMalloc: 在设备端分配内存cudaMalloc(&d_A, lengthA);cudaMalloc(&d_B, lengthB);cudaMalloc(&d_C, lengthC);/* cudaMemcpy: 在主机端和设备端拷贝数据,此函数第四个参数仅能是下面之一:(1). cudaMemcpyHostToHost: 拷贝数据从主机端到主机端(2). cudaMemcpyHostToDevice: 拷贝数据从主机端到设备端(3). cudaMemcpyDeviceToHost: 拷贝数据从设备端到主机端(4). cudaMemcpyDeviceToDevice: 拷贝数据从设备端到设备端(5). cudaMemcpyDefault: 从指针值自动推断拷贝数据方向,需要支持统一虚拟寻址(CUDA6.0及以上版本)cudaMemcpy函数对于主机是同步的 */cudaMemcpy(d_A, A, lengthA, cudaMemcpyHostToDevice);cudaMemcpy(d_B, B, lengthB, cudaMemcpyHostToDevice);//cudaMemcpy(d_C, C, lengthC, cudaMemcpyHostToDevice);const int block_size{ 32 };/* dim3: 基于uint3定义的内置矢量类型,相当于由3个unsigned int类型组成的结构体,可表示一个三维数组,在定义dim3类型变量时,凡是没有赋值的元素都会被赋予默认值1 */dim3 dimsA(colsA, rowsA, 1);dim3 dimsB(colsB, rowsB, 1);CHECK(dimsA.x == dimsB.y);//fprintf(stderr, "MatrixA(%d,%d), MatrixB(%d,%d)\n", dimsA.x, dimsA.y, dimsB.x, dimsB.y);dim3 threads(block_size, block_size);dim3 grid(dimsB.x / threads.x, dimsA.y / threads.y);/* <<< >>>: 为CUDA引入的运算符,指定线程网格和线程块维度等,传递执行参数给CUDA编译器和运行时系统,用于说明内核函数中的线程数量,以及线程是如何组织的;尖括号中这些参数并不是传递给设备代码的参数,而是告诉运行时如何启动设备代码,传递给设备代码本身的参数是放在圆括号中传递的,就像标准的函数调用一样;不同计算能力的设备对线程的总数和组织方式有不同的约束;必须先为kernel中用到的数组或变量分配好足够的空间,再调用kernel函数,否则在GPU计算时会发生错误,例如越界等;使用运行时API时,需要在调用的内核函数名与参数列表直接以<<<Dg,Db,Ns,S>>>的形式设置执行配置,其中:Dg是一个dim3型变量,用于设置grid的维度和各个维度上的尺寸.设置好Dg后,grid中将有Dg.x*Dg.y个block,Dg.z必须为1;Db是一个dim3型变量,用于设置block的维度和各个维度上的尺寸.设置好Db后,每个block中将有Db.x*Db.y*Db.z个thread;Ns是一个size_t型变量,指定各块为此调用动态分配的共享存储器大小,这些动态分配的存储器可供声明为外部数组(extern __shared__)的其他任何变量使用;Ns是一个可选参数,默认值为0;S为cudaStream_t类型,用于设置与内核函数关联的流.S是一个可选参数,默认值0. */matrix_mul<block_size> <<< grid, threads >>>(d_A, d_B, d_C, dimsA.x, dimsB.x); // 运行较快//matrix_mul<< < grid, threads >> >(d_A, d_B, d_C, colsA, rowsA, colsB, rowsB);/* cudaDeviceSynchronize: kernel的启动是异步的, 为了定位它是否出错, 一般需要加上cudaDeviceSynchronize函数进行同步; 将会一直处于阻塞状态,直到前面所有请求的任务已经被全部执行完毕,如果前面执行的某个任务失败,将会返回一个错误;当程序中有多个流,并且流之间在某一点需要通信时,那就必须在这一点处加上同步的语句,即cudaDeviceSynchronize;异步启动reference: https://stackoverflow.com/questions/11888772/when-to-call-cudadevicesynchronize *///cudaDeviceSynchronize();cudaMemcpy(C, d_C, lengthC, cudaMemcpyDeviceToHost);// cudaFree: 释放设备上由cudaMalloc函数分配的内存cudaFree(d_A);cudaFree(d_B);cudaFree(d_C);// cudaEventRecord: 记录一个事件,异步启动,stop记录结束时间cudaEventRecord(stop, 0);// cudaEventSynchronize: 事件同步,等待一个事件完成,异步启动cudaEventSynchronize(stop);// cudaEventElapseTime: 计算两个事件之间经历的时间,单位为毫秒,异步启动cudaEventElapsedTime(elapsed_time, start, stop);// cudaEventDestroy: 销毁事件对象,异步启动cudaEventDestroy(start);cudaEventDestroy(stop);return 0;
}
GitHub:https://github.com/fengbingchun/CUDA_Test
相关文章:
业界首个实时多目标跟踪系统开源
(图片由AI科技大本营付费下载自视觉中国)作者 | CV君来源 | 我爱计算机视觉(ID:aicvml)相对业界研究比较多的单目标跟踪,多目标跟踪(Multi-Object Tracking,MOT)系统在实…

python基础 练习题
【练习题1】实现一个整数加法计算器如 content input(">>> ") # 59 , 64 count0 while 1:contentinput(>>>)s1 content.split()print(s1)count 0for i in s1:count int(i)print(count) 【练习题2】请编写1 - 100 所有数的和 sum0 for i in r…
[再寄小读者之数学篇](2014-04-18 from 352558840@qq.com [南开大学 2014 年高等代数考研试题]二次型的零点)...
(2014-04-18 from 352558840qq.com [南开大学 2014 年高等代数考研试题]) 设 ${\bf A}$ 为实对称矩阵, 存在线性无关的向量 ${\bf x}_1,{\bf x}_2$, 使得 ${\bf x}_1^T{\bf A}{\bf x}_1>0$, ${\bf x}_2^T{\bf A}{\bf x}_2<0$. 证明: 存在线性无关的向量 ${\bf x}_3,{\bf …

从0到1详解推荐系统中的嵌入方法,原理、算法到应用都讲明白了
(图片由AI科技大本营付费下载自视觉中国)作者丨gongyouliu编辑丨lily来源 | 大数据与人工智能(ID:)前言作者曾在这篇文章中提到,矩阵分解算法是一类嵌入方法,通过将用户行为矩阵分解为用户特征矩…
iOS-Swift中的递增(++)和递减(--)被取消的原因-官方答复
众所周知,在很多编程语言中,对一个变量递增1用,递减1用--,在Swift3之前也是可以这么用的,但之后被取消了。 所以在目前Swift5的版本中,只能用1和-1来进行递增和递减了 如果坚持用或--将会提示以下错误&…
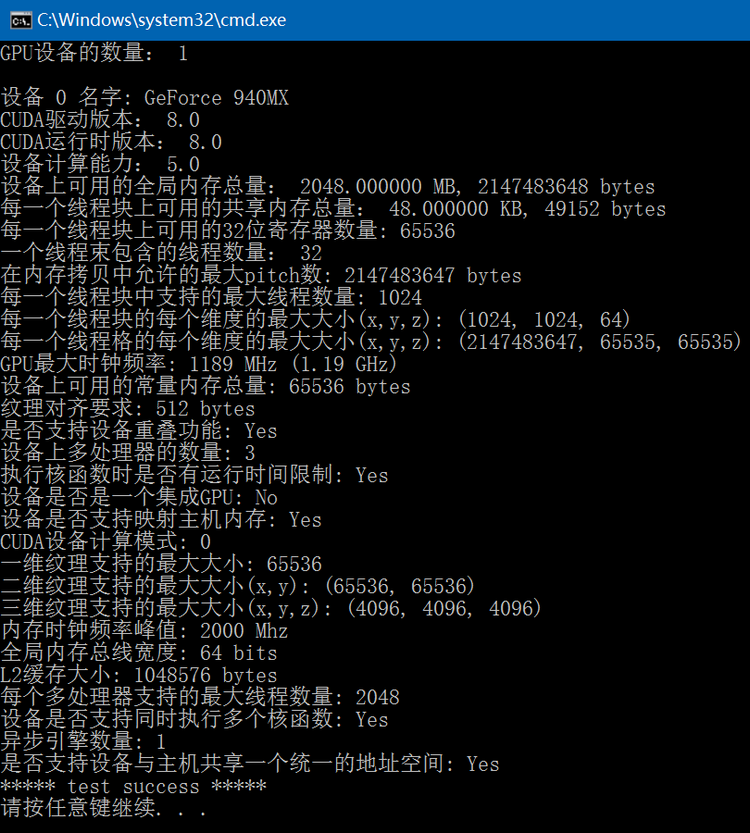
CUDA Samples: 获取设备属性信息
通过调用CUDA的cudaGetDeviceProperties函数可以获得指定设备的相关信息,此函数会根据GPU显卡和CUDA版本的不同得到的结果也有所差异,下面code列出了经常用到的设备信息:#include "funset.hpp" #include <iostream> #include…
apache代理模块proxy使用
1、安装proxy模块[rootlocalhost modules]# cd /usr/local/src/httpd-2.2.16 [rootlocalhost httpd-2.2.16]# cd modules [rootlocalhost modules]# ls aaa config5.m4 debug filters ldap Makefile.in NWGNUmakefile ssl arch database echo …

CUDA Samples: image normalize(mean/standard deviation)
以下CUDA sample是分别用C和CUDA实现的通过均值和标准差对图像进行类似归一化的操作,并对其中使用到的CUDA函数进行了解说,各个文件内容如下:关于均值和标准差的计算公式可参考: http://blog.csdn.net/fengbingchun/article/detai…

中文预训练ALBERT模型来了:小模型登顶GLUE,Base版模型小10倍、速度快1倍
(图片由AI科技大本营付费下载自视觉中国)作者 | 徐亮(实在智能算法专家) 来源 | AINLP(ID:nlpjob)谷歌ALBERT论文刚刚出炉一周,中文预训练ALBERT模型来了,感兴趣的同学可以直接尝鲜试…
树莓派安装go
简介 大学的时候在使用openfalcon的时候讲过这个东西,但是那时候是介绍open-falcon的,所以感觉不是很具体,所以今天在安装frp的时候也碰到了这个问题,我就具体的说下 安装go1.4 编译最新版本的go的时候一定要先编译安装go1.4&…
设计模式中的原则
设计模式(详情click)这个术语是由Erich Gamma等人在1990年代从建筑设计领域引入到计算机科学的。它是对软件设计中普遍存在(反复出现)的各种问题,所提出的解决方案。 设计模式并不直接用来完成代码的编写,而是描述在各种不同情况下…

CUDA Samples: approximate image reverse
以下CUDA sample是分别用C和CUDA实现的对图像进行某种类似reverse的操作,并对其中使用到的CUDA函数进行了解说,各个文件内容如下:common.hpp:#ifndef FBC_CUDA_TEST_COMMON_HPP_ #define FBC_CUDA_TEST_COMMON_HPP_#include<random> #i…

超详细支持向量机知识点,面试官会问的都在这里了
(图片付费下载自视觉中国)作者 | 韦伟来源 | 知乎导语:持续准备面试中,准备的过程中,慢慢发现,如果死记硬背的话很难,可当推导一遍并且细细研究里面的缘由的话,面试起来应该什么都不…
vue-router点击切换路由报错
报错: 报错原因: 设置mode:history解决方法: 将router的mode设置为‘hash就不报错了 原因下次再分析?
gvim配置相关
用 vundle 来管理 vim 插件(包含配置文件vimrc和gvimrc) gvim插件管理神器:vundle的安装与使用 Vim插件管理Vundle Linux 下VIM的配置 Vim配置系列(一) ---- 插件管理 Vim配置系列(二) —- 好看的statusline vim优秀插件整理 一些有用的 VIM …

深度学习有哪些接地气又好玩的应用?
过去几年中,深度学习中的很多技术如计算机视觉、自然语言处理等被应用在很多实际问题中,而且相关成果也表明深度学习能让人们的工作效果比以前更好。我们收集了一些深度学习方面的创意应用,虽然没有对每项应用进行详尽描述,但是希…
Ubuntu下通过CMake文件编译CUDA+OpenCV代码操作步骤
在 CUDA_Test 工程中,CUDA测试代码之前仅支持在Windows10 VS2013编译,今天在Ubuntu 14.04下写了一个CMakeLists.txt文件,支持在Linux下也可以通过CMake编译CUDA_Test工程,CMakeLists.txt文件内容如下:# CMake file f…
JAVA 多用户商城系统b2b2c-Spring Cloud常见问题与总结(一)
在使用Spring Cloud的过程中,难免会遇到一些问题。所以对Spring Cloud的常用问题做一些总结。需要JAVA Spring Cloud大型企业分布式微服务云构建的B2B2C电子商务平台源码 一零三八七七四六二六 一、Eureka常见问题 1.1 Eureka 注册服务慢 默认情况下,服务…
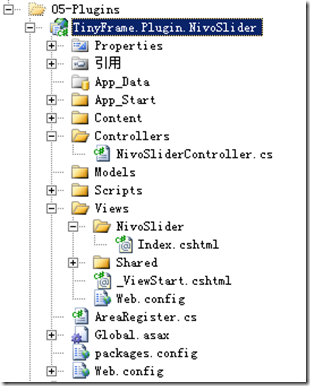
TinyFrame升级之八:实现简易插件化开发
本章主要讲解如何为框架新增插件化开发功能。 在.net 4.0中,我们可以在Application开始之前,通过PreApplicationStartMethod方法加载所需要的任何东西。那么今天我们主要做的工作就集中在这个时间段: 1.将插件DLL及文件拷贝入主网站目录并编译…
快手王华彦:端上视觉技术的极致效率及其短视频应用实践 | AI ProCon 2019
演讲嘉宾 | 王华彦(快手硅谷Y-tech实验室负责人) 编辑 | Just 出品 | AI科技大本营(ID:rgznai100) 快手用户日均上传1500万个视频,要把这些作品准确的分发给超2亿活跃用户,如果没有强大的AI技术系统去理解…
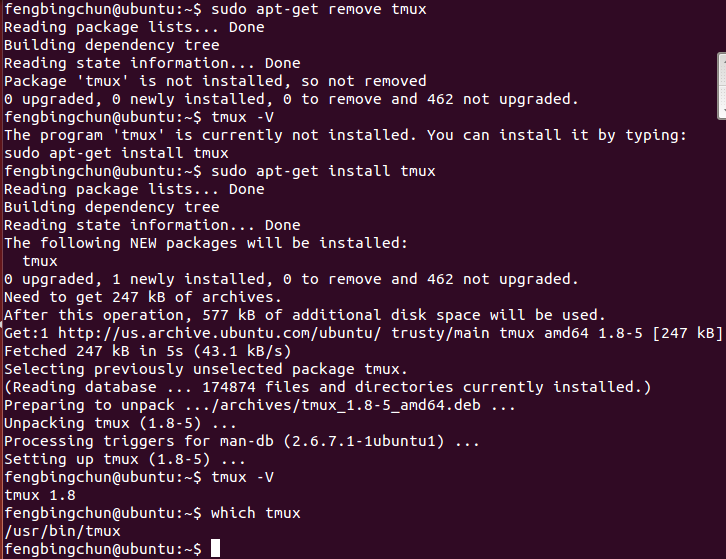
tmux简介及安装
tmux是一个开源工具,用于在一个终端窗口中运行多个终端会话。它可以减少过多的打开终端控制台。tmux的源码在 https://github.com/tmux/tmux ,它的License是BSD。tmux可以直接通过sudo apt-get install tmux命令安装(通过sudo apt-get remove tmux移除)…
Swift中依赖注入的解耦策略
原文地址:Dependency Injection Strategies in Swift 简书地址:Swift中依赖注入的解耦策略 今天我们将深入研究Swift中的依赖注入,这是软件开发中最重要的技术之一,也是许多编程语言中使用频繁的概念。 具体来说,我们将…

Eclipse mac 下的快捷键
2019独角兽企业重金招聘Python工程师标准>>> Eclipse,MyEclipse 的preference 在“windows”下边,mac下在左上角苹果图标边上 win下我们都习惯了ctrl c,在Mac 下使用标准键盘变成了win键c 系统的偏好设定 -> 键盘 -> 修饰…
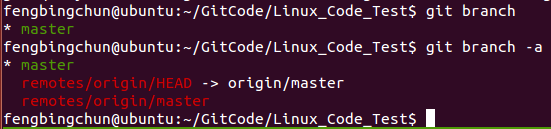
Ubuntu上使终端显示Git分支(oh-my-zsh)
oh-my-zsh是基于Zsh(Zsh是一个Linux用户很少使用的power-shell,这是由于大多数Linux产品安装,以及默认使用bash shell)的功能作了一个扩展,方便插件管理、主体自定义等。oh-my-zsh源码在 https://github.com/robbyrussell/oh-my-zsh &#x…
天哪!我的十一假期被AI操控了
(图片付费下载自视觉中国)导语:这个假期,除了脑海一直在唱歌,庆祝祖国成立的 70 周年,当然也闲不住,要乘机出去浪一浪。目前小长假进度条已经进行到 71.4% 了,有没有发现这个假期与以…
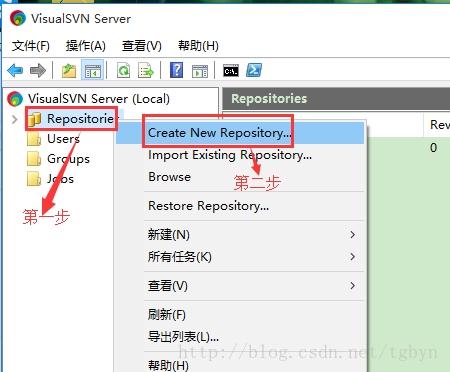
使用SVN+Axure RP 8.0创建团队项目
一、使用到的工具:VisualSVN Server --SVN服务器:https://www.visualsvn.com/server/ Axure RP 8.0 :http://www.downcc.com/soft/103078.html 二、VisualSVN Server 安装以及操作1、安装 : 默认安装即可 2、操作: &a…
no no no.不要使用kill -9.
2019独角兽企业重金招聘Python工程师标准>>> no no no.不要使用kill -9. 它没有给进程留下善后的机会: 1) 关闭socket链接 2) 清理临时文件 3) 将自己将要被销毁的消息通知给子进程 4) 重置自己的终止状态 等等。 通常,应该发送15,…
人工智能的“天罗地网”
(图片付费下载自视觉中国)整理 | 弯月编辑 | 郭芮来源 | CSDN(ID:CSDNnews)人工智能(AI)技术正在全球迅速崛起。不断涌现的最新发展令世人瞩目,从以假乱真的深度伪造视频,…
Ubuntu下安装Cppcheck源码操作步骤
Cppcheck是用在C、C中对code进行静态检查的工具。它的源码在 https://github.com/danmar/cppcheck 。它的License是GPL-3.0。Cppcheck可以检查不通过编译的文件,执行的检查包括:(1)、自动变量检查;(2)、数组的边界检查;(3)、clas…

用“脸”打卡,抬头就能签到!
科技正在飞速改变我们的生活,以前我们上班的时候,脖子上总会挂一个IC卡用来验证身份和签到打卡,后来指纹识别出现了,我们又逐渐习惯了指纹打卡,到如今,随着人脸识别技术的出现,我们开始用“脸”…