SLAM精度测评——EVO
1.install
GitHub - MichaelGrupp/evo: Python package for the evaluation of odometry and SLAM
注意:安装好依赖!
sudo apt install python-pip
pip install evo --upgrade --no-binary evo
or
pip install evo --upgrade --no-binary evo --user
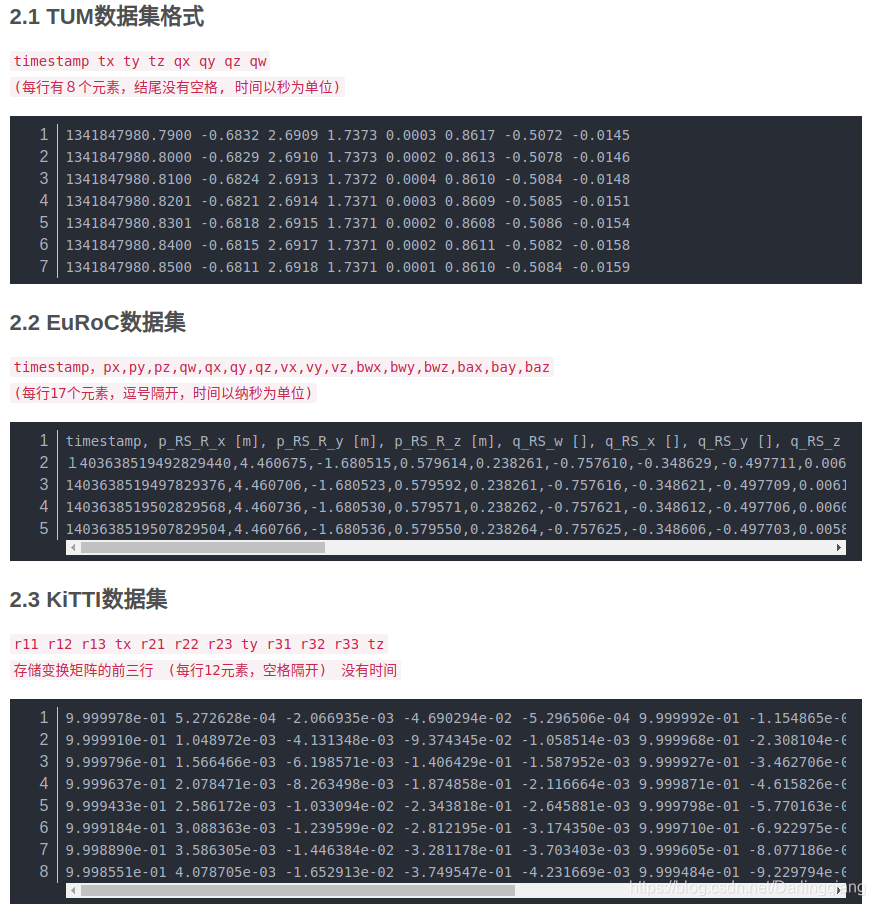
pip install numpy --upgrade --user2.数据格式(data formal):TUM/EuRoC/Kitti数据集
- 格式转换
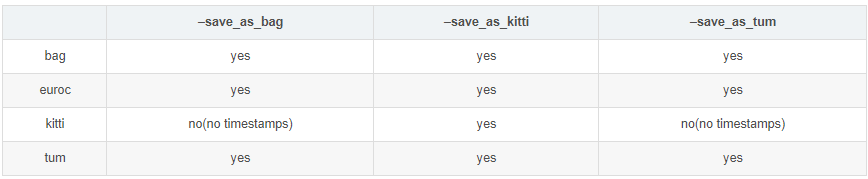
3数据格式转换
3.1"把EuRoc的数据格式转化成TUM数据格式"

evo_traj euroc data.csv --save_as_tum将生成的 KeyFrameNavStateTrajectory.txt 文件,格式如下。总共17位 (timestamp;position3;q4;v3;bw3;ba3)

转化成符合TUM 形式的轨迹文件格式:8位
timestamp x y z q_x q_y q_z q_w![]()
3.2"TUM数据转换成kitti格式"
evo_traj tum traj_1.txt traj_2.txt traj_3.txt --save_as_kitti3.3"TUM数据转换成kitti格式"
- " 把一些文件的数据格式转化成rosbag"
evo_traj tum traj_1.txt traj_2.txt traj_3.txt --save_as_bag4.evo使用
evo_traj euroc v203_truth.csv --plot
2.Plot multiple trajectories
- Here, we plot two KITTI pose files and the ground truth using
evo_traj:
cd test/data
evo_traj kitti KITTI_00_ORB.txt KITTI_00_SPTAM.txt --ref=KITTI_00_gt.txt -p --plot_mode=xz3.Run a metric on trajectories
3.1 evo_ape
绝对位姿误差,常被用作绝对轨迹误差,比较估计轨迹和参考轨迹并计算整个轨迹的统计数据,适用于测试轨迹的全局一致性。
命令语法:命令 格式 参考轨迹 估计轨迹 [可选项]
其中格式包括euroc、tum等数据格式,可选项有对齐命令、画图、保存结果等。
For example, here we calculate the absolute pose error for two trajectories from ORB-SLAM and S-PTAM using evo_ape (KITTI_00_gt.txt is the reference (ground truth)) and plot and save the individual results to .zip files for evo_res:
mkdir results
evo_ape kitti KITTI_00_gt.txt KITTI_00_ORB.txt -r full
-va --plot --plot_mode xz --save_results results/ORB.zip命令的含义为:计算考虑平移和旋转部分误差的ape,进行平移和旋转对齐,以详细模式显示,保存画图并保存计算结果。
命令运行后得到结果如下图所示

其中-r表示ape所基于的姿态关系

不添加-r/–pose_relation和可选项,则默认为trans_part。
-v表示verbose mode,详细模式,-a表示采用SE(3) Umeyama对齐,其余可选项如下表所示。不加-s表示默认尺度对齐参数为1.0,即不进行尺度对齐。

详情:
可通过 evo_ape +数据格式 + --help查看更多参数的含义以及如何使用。例如
evo_ape euroc --help
3.2 evo_rpe
相对位姿误差不进行绝对位姿的比较,相对位姿误差比较运动(姿态增量)。相对位姿误差可以给出局部精度,例如slam系统每米的平移或者旋转漂移量。
命令语法:命令 格式 参考轨迹 估计轨迹 [可选项]
其中格式包括euroc、tum等数据格式,可选项有对齐命令、画图、保存结果等。
常用命令示例:
evo_rpe euroc data.csv V102.txt -r angle_deg --delta 1 --delta_unit m
-va --plot --plot_mode xyz --save_plot ./VIO --save_results ./VIO.zip命令的含义为 求每米考虑旋转角的rpe,以详细模式显示并画图。
命令运行后得到结果如下图所示
其中-r表示ape所基于的姿态关系

不添加-r/–pose_relation和可选项,则默认为trans_part。
–d/–delta表示相对位姿之间的增量,–u/–delta_unit表示增量的单位,可选参数为[f, d, r, m],分别表示[frames, deg, rad, meters]。–d/–delta -u/–delta_unit合起来表示衡量局部精度的单位,如每米,每弧度,每百米等。其中–delta_unit为f时,–delta的参数必须为整形,其余情况下可以为浮点型。–delta 默认为1,–delta_unit默认为f。
-v --plot --plot_mode xyz --save_results results/VINS.zip --save_plot等同evo_ape中所讲。
当在命令中加上–all_pairs,则计算rpe时使用位置数据中所有的对而不是仅连续对,此时,可以通过-t/–delta_tol控制–all_pairs模式下的相对增量的容差(relative delta tolerance)。需要注意–all_pairs下不能使用–plot函数。
可通过 evo_rpe +数据格式 + --help查看更多参数的含义以及如何使用。例如
evo_rpe euroc --help
4.Process multiple results from a metric
evo_res can be used to compare multiple result files from the metrics, i.e
- print infos and statistics (default)
- plot the results
- save the statistics in a table
Here, we use the results from above to generate a plot and a table:
evo_ape/evo_rpe中将结果保存为.zip文件后,可以利用evo_res对不同的结果进行比较。
evo_res results/*.zip -p --save_table results/table.csvevo_res --help可查看可选参数含义。
evo其他常用命令

结果如下所示:

参考evo: GitHub - MichaelGrupp/evo: Python package for the evaluation of odometry and SLAM
相关文章:

【UVA】10152 ShellSort (几只乌龟的故事)
https://vjudge.net/problem/UVA-10152 题目大意: 输入N,给你N个乌龟的名字,下面N行是初始状态,在下面N行是最终状态,你选中这只乌龟以后,只能把它移动到最上面,问怎么样操作步数最少…
python2与python3转换记录
为什么需要有两个版本的Python Python2和Python3不兼容是每个接触过Python的开发者都知道的事,虽说Python3是未来,但是仍然有很多项目采用Python2开发。Linux的许多发行版本(如Ubuntu)都会自带Python2.7,但是当我们准备开发一个Python3项目的…

oracle读书笔记之Oracle 11g R2 DBA操作指南(前三章)
Oracle 11g R2 DBA操作指南是我学习的第一本讲述oracle数据库知识的书籍,在此记录下自己的学习笔记,对于书中的知识点本人通过实际操作进行验证。1.Oracle数据库基础1.1.关系数据库1.1.1.关系数据库模型1.关系数据库模型三个核心概念:关系、属…
【UVA】11991 Easy Problem from Rujia Liu? (整数v第k次出现在什么位置)
https://vjudge.net/problem/UVA-11991 题目大意:就是给你一个序列,然后给出k和v,看整数v第k次出现在该序列的什么位置,没有的话就输出0 结构体(略复杂): #include <iostream> #include…
面试题:2018最全Redis面试题整理
1、什么是Redis?Redis 是完全开源免费的,遵守BSD协议,是一个高性能的key-value数据库。 Redis 与其他 key - value 缓存产品有以下三个特点:Redis支持数据的持久化,可以将内存中的数据保存在磁盘中,重启的时候可以再次…

Android5.0如何正确启用isLoggable(二) 理分析
转自:http://www.it165.net/pro/html/201506/43374.html 概要 在上文《Android 5.0 如何正确启用isLoggable(一)__使用详解》中分析了isLoggable的使用方法,本文主要分析isLoggable实现原理以及user版系统root后永久enable isLoggable的原理,…
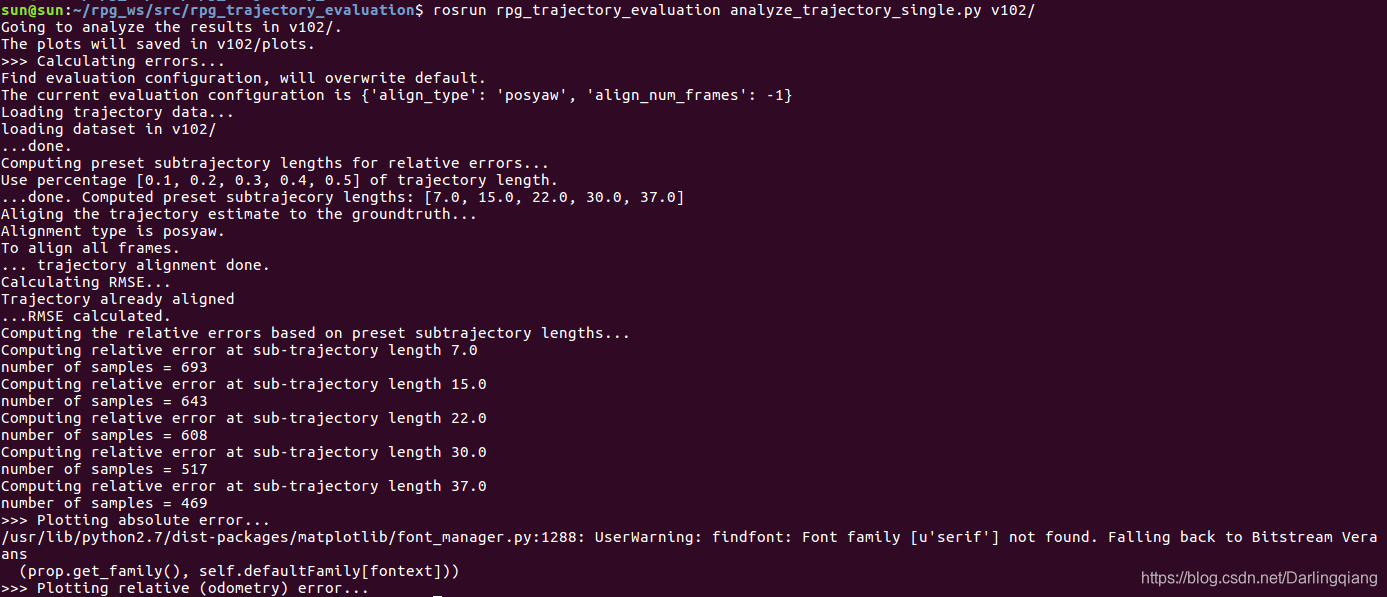
SLAM精度测评——rpg_trajectory_evaluatio
1. install https://github.com/ccxslam/rpg_trajectory_evaluation#install 下载catkin_simple:https://github.com/catkin/catkin_simple 建立工作空间 src下载,编译,然后下载rpg_trajectory_evaluatio,编译安装即可。 2&a…

STL set multiset
STL容器大的方向分为两类,序列式容器和关联式容器。 这两者通过数据在容器内的排列来区分。关联容器和顺序容器的根本不同在于:关联容器中的元素是按关键字来保存和访问的,而顺序容器中的元素则是按它们在容器中的位置来顺序保存和访问的。 …
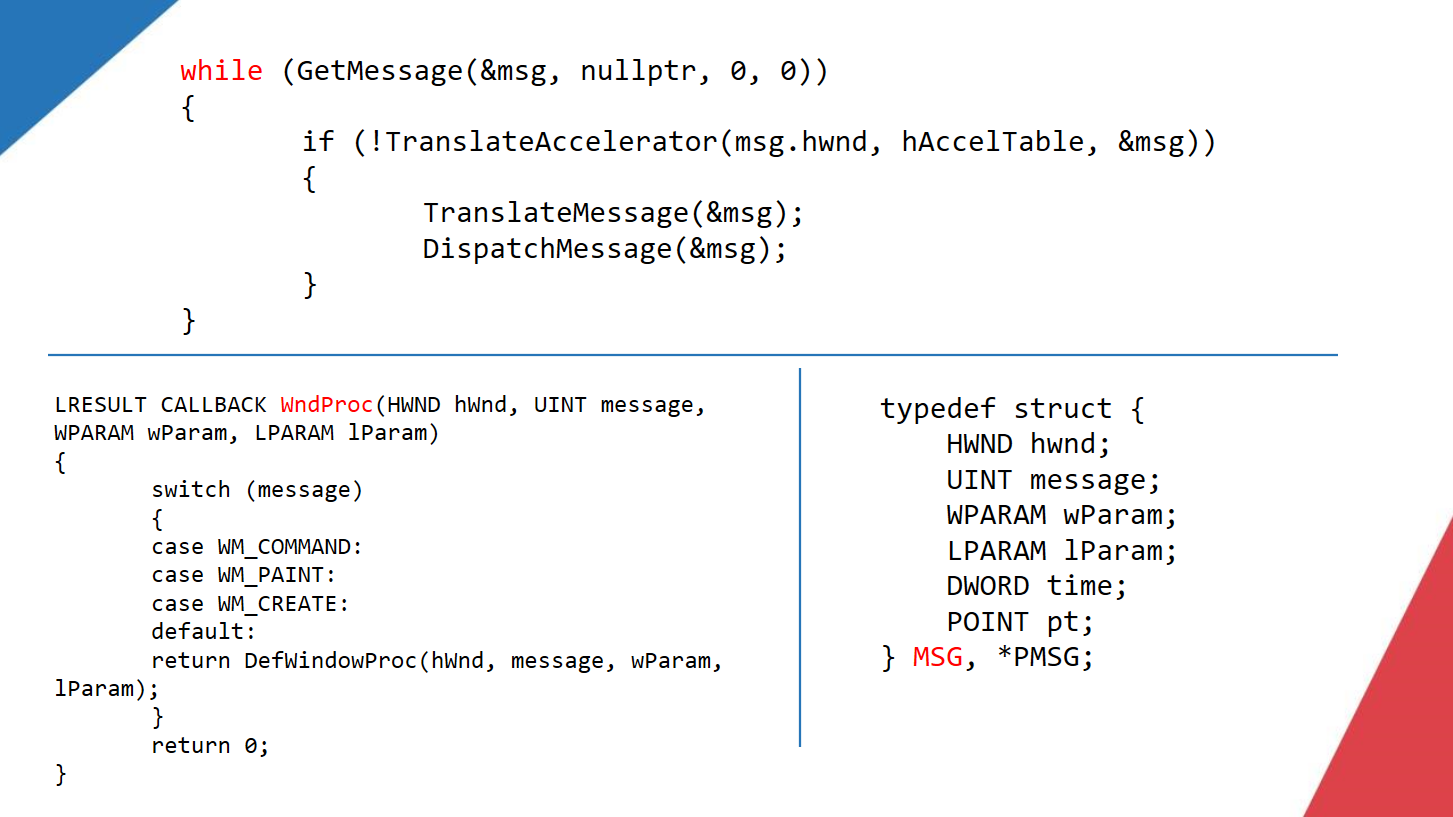
Windows 消息循环(1) - 概览
本文从消息循环是如何驱动程序的这个角度,对 Windows 消息循环进行概览性介绍。 使用 EN5 课件获得更好的阅读体验: 【希沃白板5】课件分享 : 《Windows培训 - 消息循环》https://r302.cc/q2d1jB 点击链接直接预览课件 1 程序是怎么跑起来的?…
得到的旋转向量和平移向量转换成旋转矩阵 (SE(3))
理论过程 头文件说明 1.使用罗德里格斯公式需要包含头文件为#include<opencv2/calib3d.hpp> 2.使用函数cv2eigen需要包含头文件<opencv2/core/eigen.hpp>,但是在则之前要包含一个对eigen定义的头文件,否则会报eigen.hpp文件的错,…

[译稿]同步复制提议 2010-09
2019独角兽企业重金招聘Python工程师标准>>> 同步复制9/2010议案 目录 [隐藏] 1 PAGE状态 2 有何不同之处这个补丁? 3 同步复制概述 4 用户视角 4.1 管理员视角 5 实现 5.1 STANDBY 5.2 MASTER 6 CODE 7 性能分析 8 尚未实现 9 ,其他问题 PAG…

STL vector
1、vector是表示可变大小数组的序列容器。 2、就像数组一样,vector也采用的连续存储空间来存储元素。也就是意味着可以采用下标对vector的元素进行访问,和数组一样高效。但是又不像数组,它的大小是可以动态改变的,而且它的大小会…
JavaScript 复习之数据类型
一、简介 JavaScript 的数据类型有 7 种: 数值(number)字符串(string)布尔值(boolean)undefinednull对象(object)Symbol(ES6 中新增的类型,表示独…

Nginx反代配置
一、ngx_http_proxy_module模块ngx_http_proxy_module模块可根据用户请求的uri传递至后端服务器,实现反向代理命令:1.proxy_pass设置一个代理服务器的地址,协议,和一个可选的URI的位置应该映射。作为一个协议,“HTTP”…

STL queue priority_queue
queue 队列 queue 队列 就像排队一样,后来的排在后面,先来的先出队。所以只能对队首和队尾的元素进行操作 back()返回最后一个元素empty()如果队列空则返回真front()返回第一个元素pop()删除第一个元素push()在末尾加入一个元素size()返回队列中元素的…
镜头评价指标及测试方法(二)—畸变与分辨率
一、畸变 畸变(distortion)也称为失真,是由于光阑球差的影响,不同视场的主光线通过光学系统后与高斯像面的交点高度不等于理想像高,两者之差就是畸变。因此畸变只改变轴外物点在理想面上的成像位置,使像的形…

优秀Java程序员应该知道的20个实用开源库
一个优秀且经验丰富的Java开发人员的特点之一是对API的广泛了解,包括JDK和第三方库。我花了很多时间学习API,特别是在阅读Effective Java 3rd Edition之后,Joshua Bloch建议如何使用现有的API进行开发,而不是为常用的东西写新的代…
sersync 同步
Sersync数据同步rsync是类unix系统下的数据镜像备份工具——remote sync。一款快速增量备份工具 Remote Sync,远程同步支持本地复制,或者与其他SSH、rsync主机同步。它的特性如下:v 可以镜像保存整个目录树和文件系统。v 可以很容易做到保持原…

python-opencv 形态学
五、形态学运算 检测边和 角点 形态学算子检测图像中的边缘和拐角(实际用:Canny或Harris等算法) 5.1 检测边缘 形态学检测边缘的原理:在膨胀时,图像中的物体会想周围“扩张”;腐蚀时,图像中的物…
【 HihoCoder】1082 The Marshtomp has seen it all before (暴力 或 脑力)
https://vjudge.net/problem/HihoCoder-1082 暴力 #include <iostream> #include <cstring>using namespace std;char s[205];int main() {int i;while(gets(s)){i 0;int len strlen(s);while(i<len){if((s[i]m||s[i]M)&&(s[i1]a||s[i1]A)&&am…
java 多维数组转化为字符串
int[][] a {{1,2,3},{4,5,7}};System.out.println(Arrays.deepToString(a)); Arrays.deepToString()此方法是为了将多维数组转换为字符串而设计的。 三维二维都可以解决;转载于:https://www.cnblogs.com/lishuaiqi/p/10428612.html

python-opencv 轮廓检测
轮廓检测 图像处理中经常用到轮廓检测,OpenCV-python接口中使用cv2.findContours()函数来查找检测物体的轮廓。 import cv2img cv2.imread(D:\\test\\contour.jpg) gray cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) ret, binary cv2.threshold(gray,127,255,cv2.THRESH_BINARY)…
JavaDate类
在JDK1.0中,Date类是唯一的一个代表时间的类,但是由于Date类不便于实现国际化,所以从JDK1.1版本开始,推荐使用Calendar类进行时间和日期处理。这里简单介绍一下Date类的使用。1、使用Date类代表当前系统时间Date d new Date();Sy…
Jupyter Notebook使用教程
1、启动 在终端中输入以下命令: jupyter notebook --allow-root执行命令之后,在终端中将会显示一系列notebook的服务器信息,同时浏览器将会自动启动Jupyter Notebook。 启动过程中终端显示内容如下: $ jupyter notebook [I 08…
一次性理清JavaScript变量等高难度面试问题
主要是解决JavaScript中比较难懂的部分,当然了,这部分经常在面试题中露面,这篇文章主要是讲解解题思路,对新手会有很大帮助(如果你仔细看的话)。书籍方面,我看的是《你不知道的javascript》,精髓…

yolov3(一:模型训练)
第一部分:训练已有的voc datasets 搞清楚该算法的模型训练流程 Darknet是Joseph维护的开源的神经网络框架,使用C语言编写:https://pjreddie.com/darknet/yolo/ Darknet快速,易于安装,同时支持CPU和GPU计算࿱…
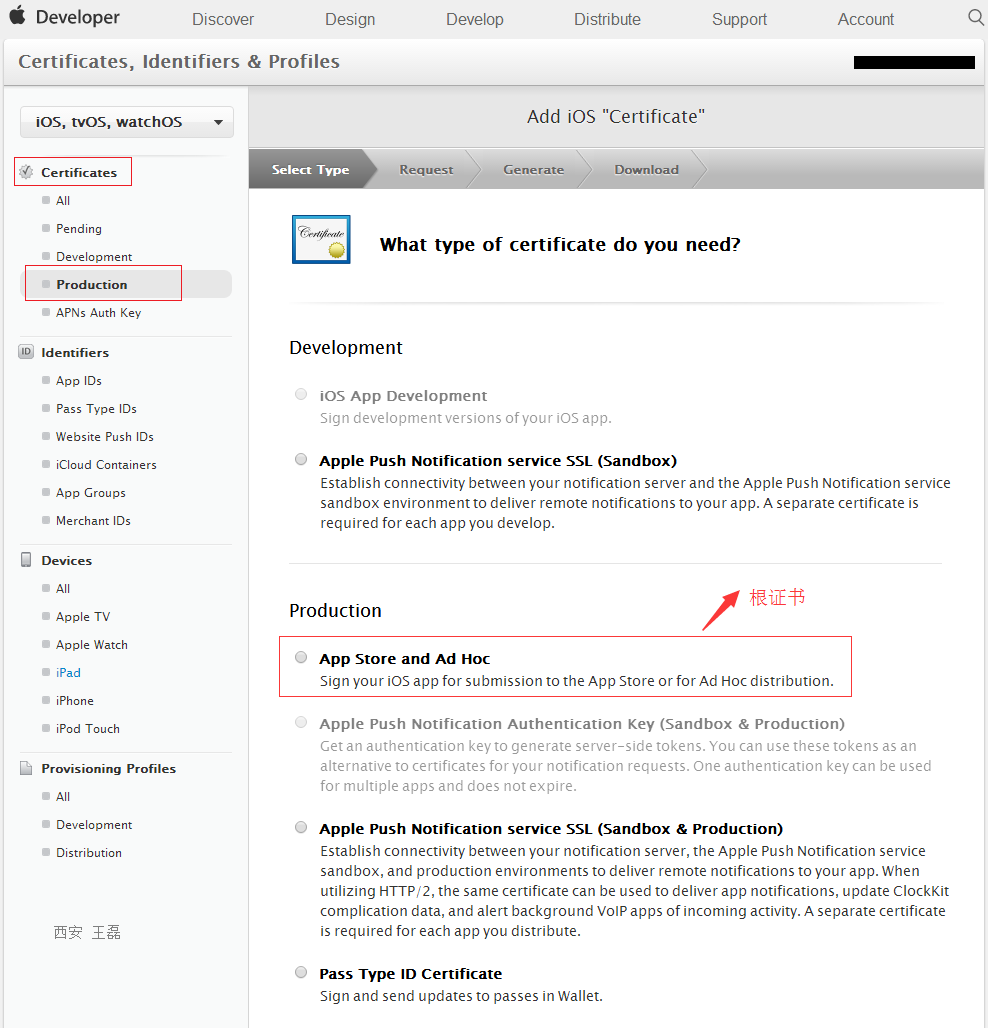
Ios生产证书申请(含推送证书)
一、Mac机上生成请求文件。 Mac机上点击证书助手 > 从证书颁发机构请求证书 > 得到CertificateSigningRequest.certSigningRequest请求文件(此请求证书建议一直保存,因为根证书的生成需要使用此请求文件,根证书多个app可以使用一个&…
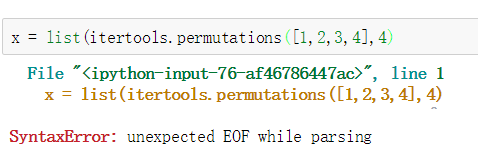
【Python】SyntaxError: unexpected EOF while parsing
找到错误的地方是 少打了半个括号 emmm 1、可能是语法问题,需要自己检查代码 2、可能是用python2.7来运行python3.0的代码不兼容

华为云家庭视频监控帮你一起守护家
设想一下?离开家了突然想起家里空调没关怎么办?家里没人有陌生人入侵了怎么办?不在家家里老人出事了怎么办? 不用愁,总有办法解决的,这些日常生活中极容易遇到的事情,没有分身术的时候ÿ…
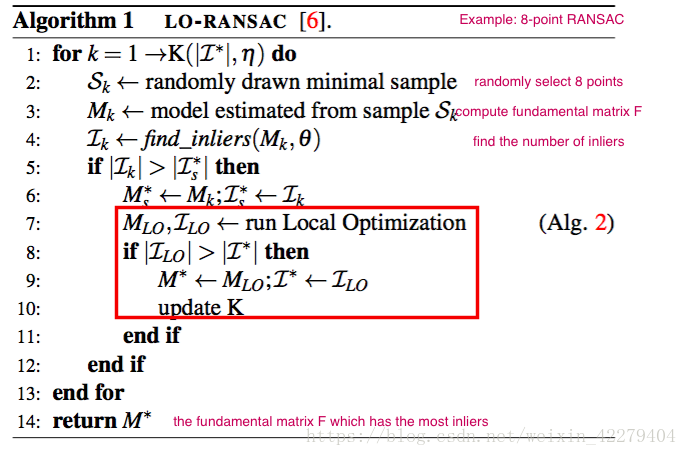
SLAM之特征匹配(三)————RANSAC------LO-RANSAC Algorithm
matlab 编译loransac,lapack mex ranH.c时一直链接错误。 原来mex在编译多个文件时要把所有的C文件都列出来。命令如下: mex loransacH.mex.c ranH.c utools.c Htools.c lapwrap.c matutl.c rtools.c -ID:\lapack\headers\lapack -LD:\lapack - lcbia.l…