得到的旋转向量和平移向量转换成旋转矩阵 (SE(3))
理论过程
头文件说明
1.使用罗德里格斯公式需要包含头文件为#include<opencv2/calib3d.hpp>
2.使用函数cv2eigen需要包含头文件<opencv2/core/eigen.hpp>,但是在则之前要包含一个对eigen定义的头文件,否则会报eigen.hpp文件的错,所以使用cv2eigen函数应该这样写头文件
#include<eigen3/Eigen/Dense>//for cv2eigen()
#include <opencv2/core/eigen.hpp>//for cv2eigen()
把旋转向量转换成旋转矩阵SO(3),使用罗德里格斯公式进行转换
需要注意到的是solvepnp函数解出来的是旋转向量r,将r转换成r=theta*u;其中u是旋转向量进行单位化后的单位向量,theta是旋转向量的模,这个theta在计算正弦值是需要把这个theta当作弧度去计算而不是角度
实践
有旋转向量rvec如下
rvec=[-0.02387454801078471;
0.02952769731891602;
0.02088407602780516]
通过这一段代码,先把旋转向量rvec通过罗德里格斯公式计算得到旋转矩阵R,在把在cv下定义的旋转矩阵R转换到Eigen下定义的矩阵r
cv::Mat R;
cv::Rodrigues(rvec,R);
Eigen::Matrix3d r;
cv::cv2eigen(R,r);
然后对应的有平移向量tvec如下
tvec=[0.005806541820330855;
0.001584643814482065;
0.003887003832579859]
通过下一段代码就能的到对应的旋转矩阵SE(3)了
Eigen::Isometry3d T = Eigen::Isometry3d::Identity();
Eigen::AngleAxisd angle(r);
cout<<"translation"<<endl;
T=angle;
T(0,3) = result.tvec.at<double>(0,0);
T(1,3) = result.tvec.at<double>(0,1);
T(2,3) = result.tvec.at<double>(0,2);
Mat rvec, tvec, inliers;
cv::solvePnPRansac( pts3d, pts2d, K, Mat(), rvec, tvec, false, 100, 4.0, 0.99, inliers );
num_inliers_ = inliers.rows;
cout<<"pnp inliers: "<<num_inliers_<<endl;cv::Mat R;
cv::Rodrigues(rvec,R);//先把旋转向量rvec通过罗德里格斯公式计算得到旋转矩阵R
Eigen::Matrix3d r;
cv::cv2eigen(R,r);//在把在cv下定义的旋转矩阵R转换到Eigen下定义的矩阵r
Eigen::Quaterniond q =Eigen::Quaterniond(r);
cout<<"quaterniond =\n"<< q.coeffs()<<endl;// x y z w
// cout << endl << "Saving camera pose trajectory to " << filename << " ..." << endl;
// ofstream f;
// f.open(filename.c_str());
// f << fixed;cv::Mat R;cv::Rodrigues(rvec,R);//先把旋转向量rvec通过罗德里格斯公式计算得到旋转矩阵REigen::Matrix3d r;cv::cv2eigen(R,r);//在把在cv下定义的旋转矩阵R转换到Eigen下定义的矩阵rEigen::Matrix<double,3,3> M=r;Eigen::Quaterniond q(M);std::vector<double> v(4);v[0] = q.x();v[1] = q.y();v[2] = q.z();v[3] = q.w();//vector<float> q = Converter::toQuaternion(r);//cout<<"r=\n"<<r<<endl;//cout<<"R=\n"<<R<<endl;//cout<<"T(0,3)=\n"<<tvec.at<double>(0,0)<<endl;
//<< setprecision(6) << *lT << " " << setprecision(9)ofstream outfile("data.txt",ios::trunc);outfile.open("data.txt");// f << tvec.at<double>[0] << " " << tvec.at<double>[1] << " " << tvec.at<double>[2] << " " << q[0] << " " << q[1] << " " << q[2] << " " << q[3] << endl;outfile<< tvec.at<double>(0,0) << " " << rvec.at<double>(1,0) << " " << rvec.at<double>(2,0)<< " " << v[0] << " " << v[1] << " " << v[2] << " "<< v[3] << endl;outfile.close();// cout<<" "<<Eigen::Matrix<double, 0, 1><<endl;
// f.close();
// cout << endl << "trajectory saved!" << endl相关文章:

[译稿]同步复制提议 2010-09
2019独角兽企业重金招聘Python工程师标准>>> 同步复制9/2010议案 目录 [隐藏] 1 PAGE状态 2 有何不同之处这个补丁? 3 同步复制概述 4 用户视角 4.1 管理员视角 5 实现 5.1 STANDBY 5.2 MASTER 6 CODE 7 性能分析 8 尚未实现 9 ,其他问题 PAG…

STL vector
1、vector是表示可变大小数组的序列容器。 2、就像数组一样,vector也采用的连续存储空间来存储元素。也就是意味着可以采用下标对vector的元素进行访问,和数组一样高效。但是又不像数组,它的大小是可以动态改变的,而且它的大小会…

JavaScript 复习之数据类型
一、简介 JavaScript 的数据类型有 7 种: 数值(number)字符串(string)布尔值(boolean)undefinednull对象(object)Symbol(ES6 中新增的类型,表示独…

Nginx反代配置
一、ngx_http_proxy_module模块ngx_http_proxy_module模块可根据用户请求的uri传递至后端服务器,实现反向代理命令:1.proxy_pass设置一个代理服务器的地址,协议,和一个可选的URI的位置应该映射。作为一个协议,“HTTP”…

STL queue priority_queue
queue 队列 queue 队列 就像排队一样,后来的排在后面,先来的先出队。所以只能对队首和队尾的元素进行操作 back()返回最后一个元素empty()如果队列空则返回真front()返回第一个元素pop()删除第一个元素push()在末尾加入一个元素size()返回队列中元素的…
镜头评价指标及测试方法(二)—畸变与分辨率
一、畸变 畸变(distortion)也称为失真,是由于光阑球差的影响,不同视场的主光线通过光学系统后与高斯像面的交点高度不等于理想像高,两者之差就是畸变。因此畸变只改变轴外物点在理想面上的成像位置,使像的形…

优秀Java程序员应该知道的20个实用开源库
一个优秀且经验丰富的Java开发人员的特点之一是对API的广泛了解,包括JDK和第三方库。我花了很多时间学习API,特别是在阅读Effective Java 3rd Edition之后,Joshua Bloch建议如何使用现有的API进行开发,而不是为常用的东西写新的代…
sersync 同步
Sersync数据同步rsync是类unix系统下的数据镜像备份工具——remote sync。一款快速增量备份工具 Remote Sync,远程同步支持本地复制,或者与其他SSH、rsync主机同步。它的特性如下:v 可以镜像保存整个目录树和文件系统。v 可以很容易做到保持原…

python-opencv 形态学
五、形态学运算 检测边和 角点 形态学算子检测图像中的边缘和拐角(实际用:Canny或Harris等算法) 5.1 检测边缘 形态学检测边缘的原理:在膨胀时,图像中的物体会想周围“扩张”;腐蚀时,图像中的物…
【 HihoCoder】1082 The Marshtomp has seen it all before (暴力 或 脑力)
https://vjudge.net/problem/HihoCoder-1082 暴力 #include <iostream> #include <cstring>using namespace std;char s[205];int main() {int i;while(gets(s)){i 0;int len strlen(s);while(i<len){if((s[i]m||s[i]M)&&(s[i1]a||s[i1]A)&&am…
java 多维数组转化为字符串
int[][] a {{1,2,3},{4,5,7}};System.out.println(Arrays.deepToString(a)); Arrays.deepToString()此方法是为了将多维数组转换为字符串而设计的。 三维二维都可以解决;转载于:https://www.cnblogs.com/lishuaiqi/p/10428612.html

python-opencv 轮廓检测
轮廓检测 图像处理中经常用到轮廓检测,OpenCV-python接口中使用cv2.findContours()函数来查找检测物体的轮廓。 import cv2img cv2.imread(D:\\test\\contour.jpg) gray cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) ret, binary cv2.threshold(gray,127,255,cv2.THRESH_BINARY)…
JavaDate类
在JDK1.0中,Date类是唯一的一个代表时间的类,但是由于Date类不便于实现国际化,所以从JDK1.1版本开始,推荐使用Calendar类进行时间和日期处理。这里简单介绍一下Date类的使用。1、使用Date类代表当前系统时间Date d new Date();Sy…
Jupyter Notebook使用教程
1、启动 在终端中输入以下命令: jupyter notebook --allow-root执行命令之后,在终端中将会显示一系列notebook的服务器信息,同时浏览器将会自动启动Jupyter Notebook。 启动过程中终端显示内容如下: $ jupyter notebook [I 08…
一次性理清JavaScript变量等高难度面试问题
主要是解决JavaScript中比较难懂的部分,当然了,这部分经常在面试题中露面,这篇文章主要是讲解解题思路,对新手会有很大帮助(如果你仔细看的话)。书籍方面,我看的是《你不知道的javascript》,精髓…

yolov3(一:模型训练)
第一部分:训练已有的voc datasets 搞清楚该算法的模型训练流程 Darknet是Joseph维护的开源的神经网络框架,使用C语言编写:https://pjreddie.com/darknet/yolo/ Darknet快速,易于安装,同时支持CPU和GPU计算࿱…
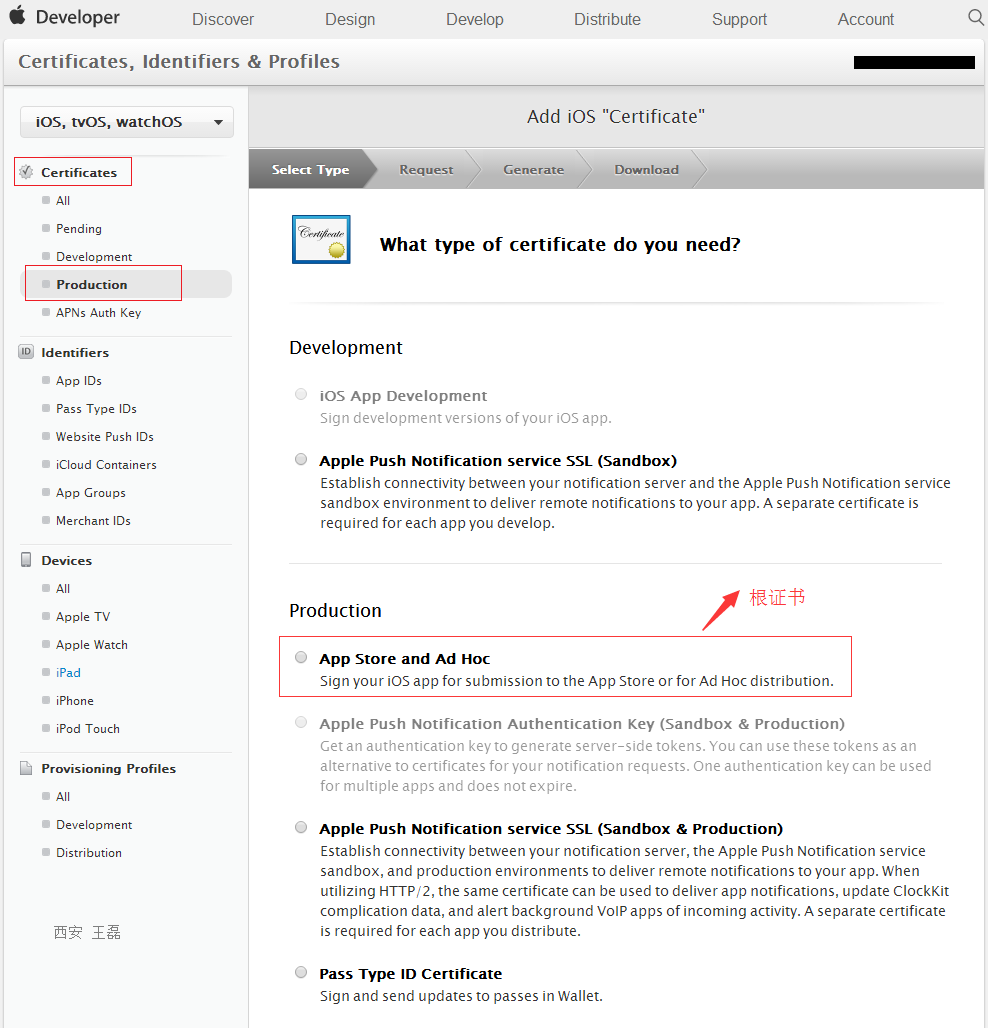
Ios生产证书申请(含推送证书)
一、Mac机上生成请求文件。 Mac机上点击证书助手 > 从证书颁发机构请求证书 > 得到CertificateSigningRequest.certSigningRequest请求文件(此请求证书建议一直保存,因为根证书的生成需要使用此请求文件,根证书多个app可以使用一个&…
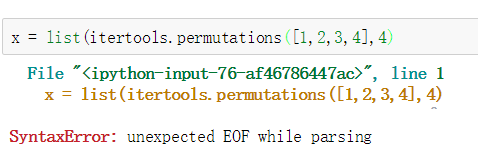
【Python】SyntaxError: unexpected EOF while parsing
找到错误的地方是 少打了半个括号 emmm 1、可能是语法问题,需要自己检查代码 2、可能是用python2.7来运行python3.0的代码不兼容

华为云家庭视频监控帮你一起守护家
设想一下?离开家了突然想起家里空调没关怎么办?家里没人有陌生人入侵了怎么办?不在家家里老人出事了怎么办? 不用愁,总有办法解决的,这些日常生活中极容易遇到的事情,没有分身术的时候ÿ…
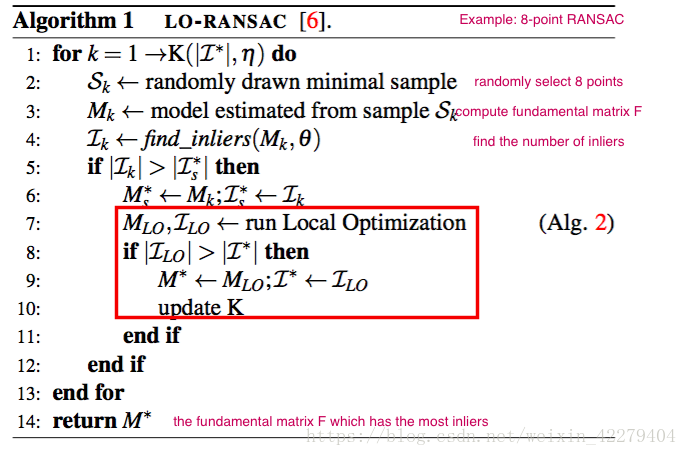
SLAM之特征匹配(三)————RANSAC------LO-RANSAC Algorithm
matlab 编译loransac,lapack mex ranH.c时一直链接错误。 原来mex在编译多个文件时要把所有的C文件都列出来。命令如下: mex loransacH.mex.c ranH.c utools.c Htools.c lapwrap.c matutl.c rtools.c -ID:\lapack\headers\lapack -LD:\lapack - lcbia.l…
【Codeforces】1136C Nastya Is Transposing Matrices (矩阵转置)
http://codeforces.com/contest/1136/problem/C 第一个矩阵可否通过转置,变换成第二个矩阵,可以的话输出“YES”,不可以的话,输出“NO” 转置之后,对角线元素是不变的 用map,或者vector 都可以 #includ…
linux基础篇-02,linux时间管理date hwclock cal 简述
################################################时间管理1,date:系统时钟查看当前系统时间[rootJameszhan etc]# date2016年 11月 14日 星期一 20:16:37 CST################################################设定系统时间 2016年 07月 20日 星期三 10:30:00 CST…
Spark shuffle调优
Spark shuffle是什么Shuffle在Spark中即是把父RDD中的KV对按照Key重新分区,从而得到一个新的RDD。也就是说原本同属于父RDD同一个分区的数据需要进入到子RDD的不同的分区。现在的spark版本默认使用的是sortshuffle;shuffle在哪里产生shuffle在spark的算子中产生,也就…
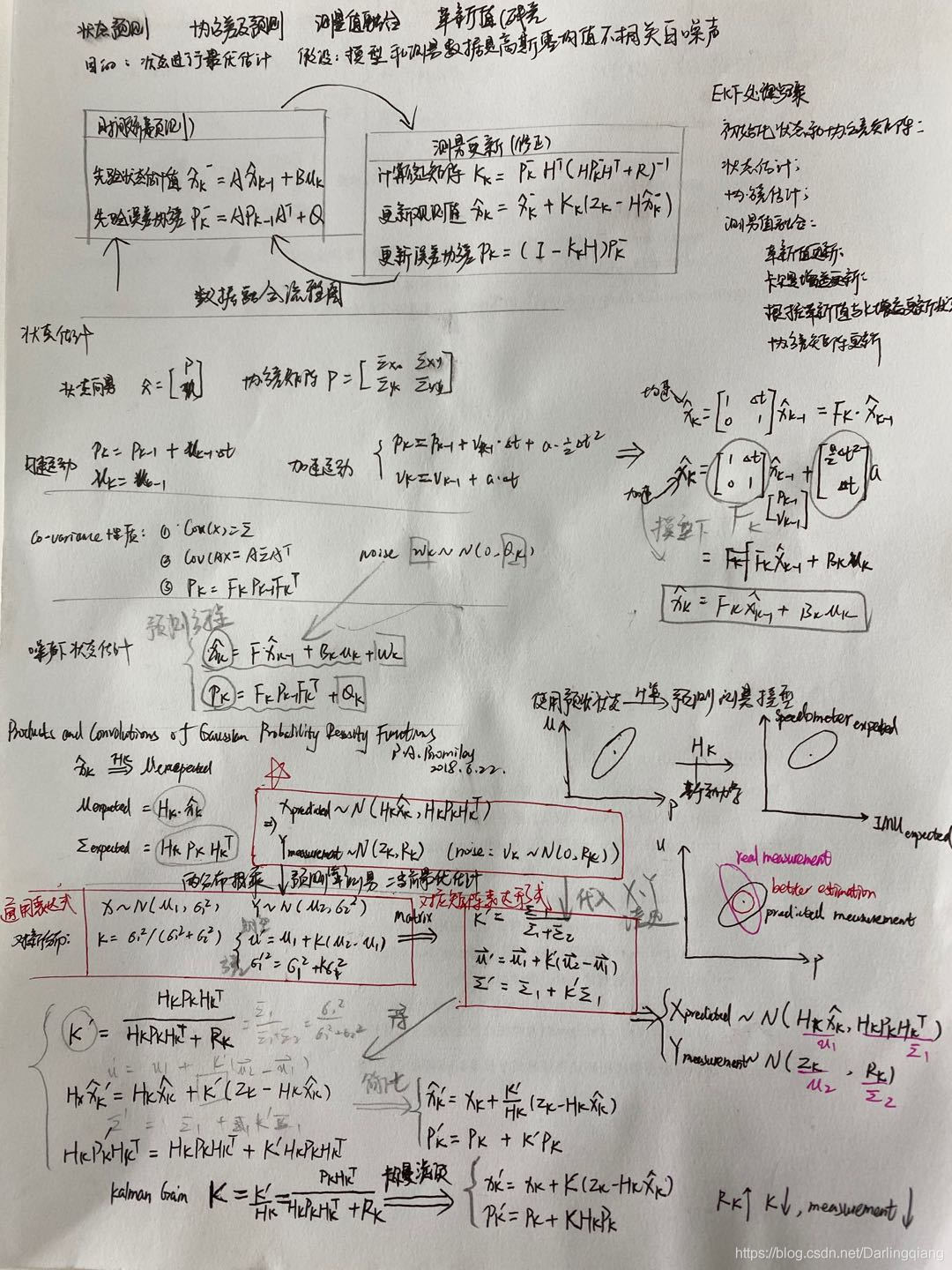
多传感器融合之滤波(一)——卡尔曼滤波(KF)推导
c参考资料:https://www.bzarg.com/p/how-a-kalman-filter-works-in-pictures/ 卡尔曼滤波本质上是一个数据融合算法,将具有同样测量目的、来自不同传感器、(可能) 具有不同单位 (unit) 的数据融合在一起,得到一个更精确的目的测量值。 卡尔…
【HDU】1284 钱币兑换问题 (想一想)
http://acm.hdu.edu.cn/showproblem.php?pid1284 除以三,看最多能放多少个三分的硬币,加一表示全部都是一分的硬币着一种情况。之后用一个循环看一下,有多少种情况 因为确定了有几个三分,有几个两分,一分的也就自然…
抓取网页的脚本 【修复】
之前张耀老师的网页脚本由于51cto升级,课程列表页面改用javascript失效了笔者发现视频课程页面右边的列表都为静态化后的视频课程地址,遂将老师初始版本的脚本进行了修改,在对视频课程页面使用时结果正常,遂将及修改后的脚本和部分…
实例规格 ECS (共享计算型)和 (通用型-原独享)性能上有什么区别?...
实例规格 ECS (共享计算型)和 (通用型-原独享)性能上有什么区别? 实例规格 共享计算型 和 通用型(原独享), 如果同样是2核4G 或者4核8G ; 性能上有什么差异/差距大吗? 内存型比通用性性能好些,而且CPU和内存配比: 通用型为1:2&…
yolov3(二:车牌识别)
0.按照:https://blog.csdn.net/Darlingqiang/article/details/103889245步骤训练自己的模型 1.下载[data.zip]:链接: https://pan.baidu.com/s/1NahLmB5YajUJT_Gk1OgN7A 提取码: 8888 2.进入data/voc目录下运行voc_label.bat重新生成2019_train.txt, 201…

[转]CSS hack大全详解
转自:CSS hack大全&详解 1、什么是CSS hack?CSS hack是通过在CSS样式中加入一些特殊的符号,让不同的浏览器识别不同的符号(什么样的浏览器识别什么样的符号是有标准的,CSS hack就是让你记住这个标准),…
【Python】打印魔方阵
1.将“1”放在第一行,中间一列; 2.从2开始至N*N各数按如下规律: 每一个数存放的行比上一个数的行减1; 每一个数存放的列比上一个数的列加1; 3.当一个数行为1,下一个数行为N; 4.当一个数列数为N,下一个…