一种视觉惯性+激光传感器的SLAM系统
一种视觉惯性+激光传感器的SLAM系统
- 这篇博客
- 论文摘要
- 一些假设和标注
- 系统总览
- VI 里程计
- 扫描匹配(scan matching)优化
- 提高系统鲁棒性的措施
- 闭环检测和临近检测
- 全局位姿图优化
- 总结
这篇博客
这篇论文“Robust High Accuracy Visual-Inertial-Laser SLAM System”发表于2019年的 IROS 会议上。它提出了一个融合了相机、惯性元件、激光这三种传感器的系统。通过不同传感器之间的互补作用,该系统,较之于视觉惯性系统和激光系统,具有更好的鲁棒性。
论文摘要
纯视觉SLAM在光照变化明显、纹理较少的环境中容易跟踪丢失,因此研究者将惯性测量元件(IMU)加入到视觉SLAM中,组成 VI-SLAM (视觉惯性SLAM)。但作者发现, IMU 只能在短期内解决纯视觉SLAM 所面对的问题,如果机器长期工作在光照变化明显、纹理缺失的环境中,系统仍会跟踪丢失(因为IMU的偏差是随机变化的,长时间不修正会直接影响位姿估计)。此外,作者还指出了激光SLAM的不足:在结构性特征缺失的环境中((比如在走廊))会跟踪丢失。所以作者将视觉惯性、激光两类SLAM相结合,搭建了基于三种传感器工作的更加鲁棒的系统。该系统可大致分为视觉惯性和激光两大位姿估计模块。它先通过视觉惯性模块估计出位姿的初值,再根据激光扫描的结果完成位姿的优化。两个模块可以来联合工作,也可以各自独立工作。这也是该系统鲁棒的原因:当一个模块跟丢了,系统也可以只通过剩余模块完成定位和建图。
一些假设和标注
1、假设相机内参KKK已知,同时三个传感器(相机、IMU、激光)之间的外参矩阵(相对位姿变换关系)也已知;
2、默认这三个传感器在时间上是同步的!!(这点很重要);
3、三个传感器都有各自的坐标系,依次记为相机:CCC,IMU:III,激光:LLL。此外将世界坐标系记为 WWW 。在初始化后,将 LLL 坐标系作为主要观测坐标系(系统主要记录3D点在 LLL 上的坐标);
4、使用 SiS_{i}Si 表示 iii 时刻的某个坐标系。并用 TbaT^{a}_{b}Tba 表示从 b 到 a 的位姿变换矩阵;
5、用 XjSX^{S}_{j}XjS 表示地图点 jjj 在 SSS 坐标系上的三维齐次坐标;
6、为了方便,下文用 VI 代表 “视觉惯性” 。
系统总览
系统先通过一个紧耦合的 VI 方法估计位姿,再通过激光扫描的结果来优化该估计值,最后再完成建图。整个过程的框图如下所示:
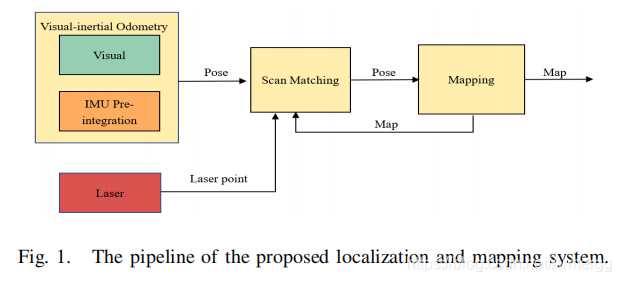
下面介绍每个模块。
VI 里程计
该系统的 VI 前端是基于 VINS-Mono 系统实现的,主要细节可查看 VINS-Mono 的论文。
扫描匹配(scan matching)优化
(这部分主要涉及激光定位,主要是 LOAM系统中的知识)扫描匹配(scan matching)模块的工作流程框图如下所示:
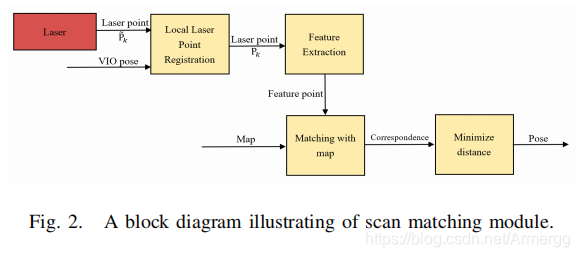
激光雷达会连续检测到地图点,并获得其在对应时刻 LtiL_{t_{i}}Lti 坐标系下的坐标。以第 kkk 次激光扫描为例, 记 tkt_{k}tk 为这次扫描的开始时间, tk+1t_{k+1}tk+1 为结束时间。令 Pk~\widetilde{P_{k}}Pk 为第 kkk 次扫描过程中检测到的所有 3D 点的集合。因为所有传感器是时间同步的,同时 tkt_{k}tk、tk+1t_{k+1}tk+1 时刻机器的位姿已由 VI 里程计估计出,所以可通过 IMU 与激光传感器间的外参矩阵估计出 LkL_{k}Lk、 Lk+1L_{k+1}Lk+1 间的位姿关系,如下式:

式中 TILT^{L}_{I}TIL 是 IMU 与激光传感器间的外参矩阵, TIk+1Ik~\widetilde{T^{I_{k}}_{I_{k+1}}}TIk+1Ik 是 VI 里程计估计的结果。
此时要引入一个假设:在 tkt_{k}tk、tk+1t_{k+1}tk+1间,机器以恒定的速度运动。此假设使得我们能通过线性插值的方法获得 ti∈[tk,tk+1]t_{i}\in [t_{k},t_{k+1}]ti∈[tk,tk+1] 时刻,LiL_{i}Li 与LkL_{k}Lk间的位姿关系,如下所示:

通过上式计算的位姿,可以将任意 tit_{i}ti 时刻检测到的点都转换到 Lk+1L_{k+1}Lk+1 坐标系上表示:

此时,将转换后所有在 Lk+1L_{k+1}Lk+1 坐标系中的点的集合记为 Pk{P_{k}}Pk。
根据 PkP_{k}Pk 中各点局部表面的平滑程度,决定某点属于边缘特征点或平面特征点。将提取出来的特征点的集合记为 FkF_{k}Fk 。此时,再根据已经通过优化得出的 LkL_{k}Lk 与世界坐标系的相对位姿结果 TLkWT^{W}_{L_{k}}TLkW 和 公式 (1) ,推出 Lk+1L_{k+1}Lk+1 与世界坐标系之间的相对位姿估计值 TLk+1W~\widetilde{T^{W}_{L_{k+1}}}TLk+1W :

通过 公式(4) 求得的 TLk+1W~\widetilde{T^{W}_{L_{k+1}}}TLk+1W 将 FkF_{k}Fk 包含的所有特征点都投影到世界坐标系中,并为它们在已构建好的地图中寻找相匹配的线边缘、平面块等结构特征(由此就建立了 Lk+1L_{k+1}Lk+1 与地图的联系。根据这个联系就能构建出图优化的边)。然后计算 FkF_{k}Fk 中特征点到相匹配的线边缘或平面块的距离 ddd 。这个过程可以用下面的函数 fff 表示:

(PS:特征点寻找匹配的边缘线和平面块的方法,以及距离的计算方法可在 “LOAM: Lidar odometry and mapping in real time” 论文中查看)
将所有 did_{i}di 相加,即为需要优化的变量:

由此,激光的扫描匹配(scan matching)的结果建模出了一个非线性优化问题。通过牛顿梯度下降的方法使 ddd 的值趋近于 0 (因为理论上特征点到与其匹配的线或面的距离应该为 0)。如果结果能够收敛,则能获得一个关于激光传感器的优化后位姿:TLk+1WT^{W}_{L_{k+1}}TLk+1W。最后通过 TLk+1WT^{W}_{L_{k+1}}TLk+1W 将第 kkk 次激光扫描获得的点云图转换到世界坐标系中,更新地图。
(个人想法:从系统的流程可以看出,系统对于 VI 模块和激光扫描匹配模块采用的是松耦合的方式(先 VI 估计再扫描匹配优化)。因此激光模块优化的效果比较依赖于 VI 的估计初值。这或许能通过紧耦合的方式来改善,但会提高系统的复杂度且降低各模块的灵活性)
提高系统鲁棒性的措施
如最初在摘要中所说的,视觉惯性SLAM 和激光SLAM 在某些环境下都会存在跟踪丢失的风险。所以作者构建的这个系统主要是由两个独立性较强的模块(VI 位姿估计模块和激光扫描匹配模块)组成的。在某个模块失效后,另一个能够独立工作,以保证系统的正常运行。这就是该系统具有较高鲁棒性的原因。
根据系统工作时所使用的模块的不同,可分成以下三种工作模式:
(1)正常工作模式:
此时 VI 和激光 模块都正常工作,系统按照前几节描述的流程完成定位和建图;
(2)scan to scan matching 工作模式:
此时 VI 模块跟踪丢失,启动 “两次激光扫描间的匹配(scan to scan matching)” 定位模块(自己取的名字,见笑见笑)。这个模块是基于 LOAM 系统构造的,它的大致工作过程和上一小节中的 “扫描匹配(scan matching)优化” 相似,只是这里估计的是 LkL_{k}Lk 和Lk−1L_{k-1}Lk−1 之间的位姿 TLk−1LkT^{L_{k}}_{L_{k-1}}TLk−1Lk ,而不是 TLkWT^{W}_{L_{k}}TLkW。此模式下系统的工作流程图如下所示:
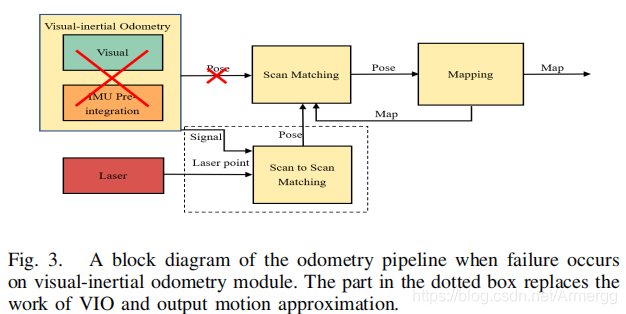
(PS:当发生以下几种情况时,系统会认定 VI 模块失效:当前跟踪到的特征点很少、IMU 偏差变化较大、VI 滑动窗口中的位姿估计值与先前估计的结果偏差较大)
(3)仅使用 VI 工作模式:
此时系统仅使用 VI 模块完成定位和建图,流程图如下所示:
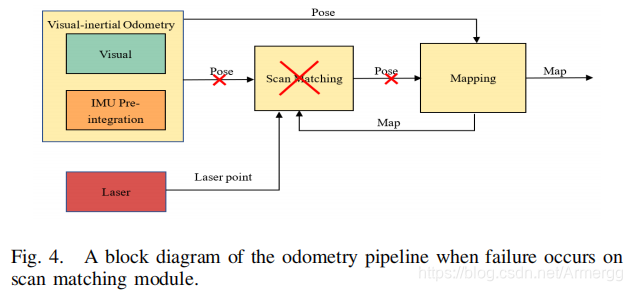
(PS:此模式主要是在结构信息缺失的环境中使用)
这三种工作模式使得系统能在多种不同的、难度较高的环境下继续工作。同时,当环境条件变好后,系统仍会重新启用之前失效的模块,变回正常的工作模式。
(疑惑:以第三个模式为例,当激光模块重新工作时,由 VI 模块构建的地图作为激光模块的初始地图,还是激光模块会重新构建新的地图?即 VI 和激光模块两者所构建的地图是否能够互相使用。)
闭环检测和临近检测
老规矩,为了消除累积误差,系统需要有闭环检测的能力。因为当前系统搭载了视觉、激光传感器,所以它实现闭环检测的方式有两种:
1、基于视觉和词袋向量的闭环检测,也就是最经典的视觉闭环检测方法;
2、基于激光雷达的临近检测。
作者指出,第一种方法存在一定缺点:必须观测到相同物体,才能检测到闭环(对机器的观测视角有要求)。而第二种方法则没有这个限制,因为激光雷达是 360° 扫描的。为了避免过多的约束和计算,某个关键帧( KF )在实现视觉闭环检测后,将不再进行临近检测。
闭环检测想必大家都较为了解,所以这里主要介绍一下临近检测(这部分内容也是第一次看,理解不对之处望谅解和指出),它的过程图如下:
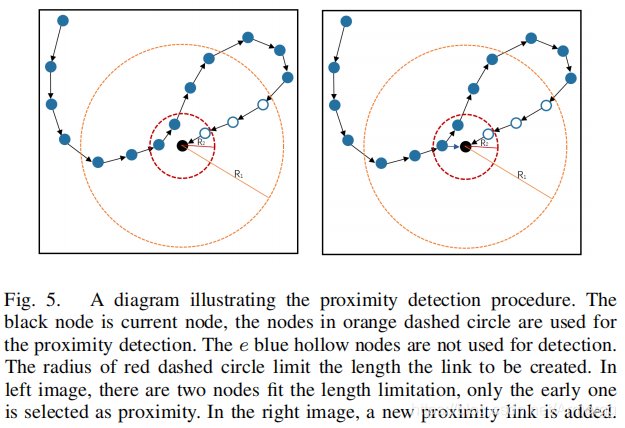
首先在 KF 数据库中计算各 KF 与当前关键帧( KFcKF_{c}KFc)在世界坐标系下的相对距离(即二者三维坐标的距离)。记所有与 KFcKF_{c}KFc 距离小于 R1R_{1}R1 关键帧的集合为 KFsloopKFs_{loop}KFsloop 。以 KFsloopKFs_{loop}KFsloop 中的一个关键帧(KFaKF_{a}KFa)为例:
在 KFcKF_{c}KFc 和 KFaKF_{a}KFa 已有的估计位姿基础上,求出两者间的相对位姿 TKFcKFcT^{KF_{c}}_{KF_{c}}TKFcKFc ,再根据先前提到的 “两次激光扫描间的匹配方法” ,优化 TKFcKFcT^{KF_{c}}_{KF_{c}}TKFcKFc 。此时如果 KFcKF_{c}KFc 和 KFaKF_{a}KFa 之间的相对距离小于 R2R_{2}R2,则两帧满足临近检测要求。
(PS:每个关键帧包含机器的位姿、对应图片的特征点和从激光扫描中获得的几何特征点信息)
对 KFcKF_{c}KFc 和 KFsloopKFs_{loop}KFsloop 中每个 KFs 都进行如上操作。如果有多个 KFs 满足临近检测要求,则只选择产生时间最早的那个 KF 与 KFcKF_{c}KFc 构成闭环(因为这样可以获得较大的闭环,有利于消除更多的累积误差)。此外,假设 KFcKF_{c}KFc 的编号为 kkk ,那么编号为 k−e,...,k−1k-e,...,k-1k−e,...,k−1的 KF 不会参与临近检测的判定( e 的值根据经验设定)。这样可以降低计算量。
(个人理解:从论文的实验结果来看,同时使用视觉闭环和临近检测与只使用其中之一相比,最终精度的差距不是很大。但是为了保证系统的两个模块的独立性,这两个检测方法需要要同时存在。)
全局位姿图优化
当完成闭环产生后,系统将执行全局位姿图优化。图中 KF 作为顶点,它包含三种边:
1、相邻 KF 之间的连续边,这个边计算的是相邻 KF 间的相对平移和旋转变换:

2、闭环检测边。这个边计算的是闭环 KF 之间的相对平移和旋转变换,使用的是 PnP方法。
3、临近检测边。和闭环边类似,只不过采用的是 “两次激光扫描间的匹配方法”。
所以,图中顶点 iii 和 jjj 之间的误差可表示为:

(个人理解:式中减号左边的项可能由 IMU 预积分获得,因为 IMU 测量值的预积分结果可能更接近于真值)
整个优化图中的总误差为:

式中A、B、CA、B、CA、B、C 分别对应上述 1、2、3 类边。这个非线性优化问题通过 Ceres Solver解决。为了降低计算量,系统会限制 KF 数据库中关键帧的数量。构成闭环的 KFs 会被保留,而那些与自己邻近 KFs 距离较近的关键帧将被剔除。
总结
这个系统应该是多传感器融合 SLAM 中较简单的一个实现方法。它将视觉惯性和激光匹配两种位姿估计方法进行松耦合(先 VI 估计,再激光匹配优化),让两个不同、相对独立的模块共同完成机器的位姿估计。这使得系统的工作流程更为清晰,降低了复杂度,同时也保证系统能够灵活地对切换工作模式,以应对不同的环境条件。此外,系统在闭环检测时采用的两种不同方法,也能提高整体精度。
相关文章:

抽象类和接口的联系与区别
抽象类和接口联系与区别 关键字: 抽象类与接口的区别 abstract class和interface是Java语言中对于抽象类定义进行支持的两种机制,正是由于这两种机制的存在,才赋予了Java强大的面向对象能力。 abstract class和interface之间在对于抽象类定义的支持方面具…
P1132 数字生成游戏
题目描述 小明完成了这样一个数字生成游戏,对于一个不包含00的数字ss来说,有以下33种生成新的数的规则: 将ss的任意两位对换生成新的数字,例如143143可以生成314,413,134314,413,134;将ss的任意一位删除生成新的数字&a…
MySQL02-升级
MySQL 版本号由三个数字和可选后缀组成,形式 mysql-x.y.z-suffix。比如 mysql-5.7.21 或者 mysql-5.7.34。 x(5)这位是大版本y(7)这位是小版本,大版本小版本组合成 5.7 就是一个发行版最后一位是bugfix release版本,从1逐渐增加,…

Kinect V1读取图像数据(For Windows)
Kinect V1读取图像数据(For Windows)这篇博客Kinect V1介绍数据读取的基本流程运行代码和注释结尾这篇博客 刚好有一台现成的Kinect V1相机,所以就拿过来学习一下它的数据读取方式和编程方法,毕竟它还能用于跑RGBD-SLAM。Kinect V…
1.IocDI和Spring
1.面向对象回顾和案例 面向对象程序设计:1 2 3 4 案例分析: 需求分析: 报表功能: 报表服务类,检索数据,并生成图标 报表生成器类,生成不同格式的报表文件,例如PDF格式、Html…

MySQL之模糊查询
先在MySQL数据库里创建一个表,并添加几条数据: create table student(id char(36) primary key,name varchar(8) not null,age int(3) default 0,mobile char(11),address varchar(150) ) insert into student values (9b4435ec-372c-456a-b287-e3c5aa…

rsync工具
rsync工具一、介绍1、可以实现 本地数据 《----------》 远程数据/本地数据 的传输2、两种通信方式(man rsync)(1)remote shell(一个冒号:),通过sshd协议传输(2…
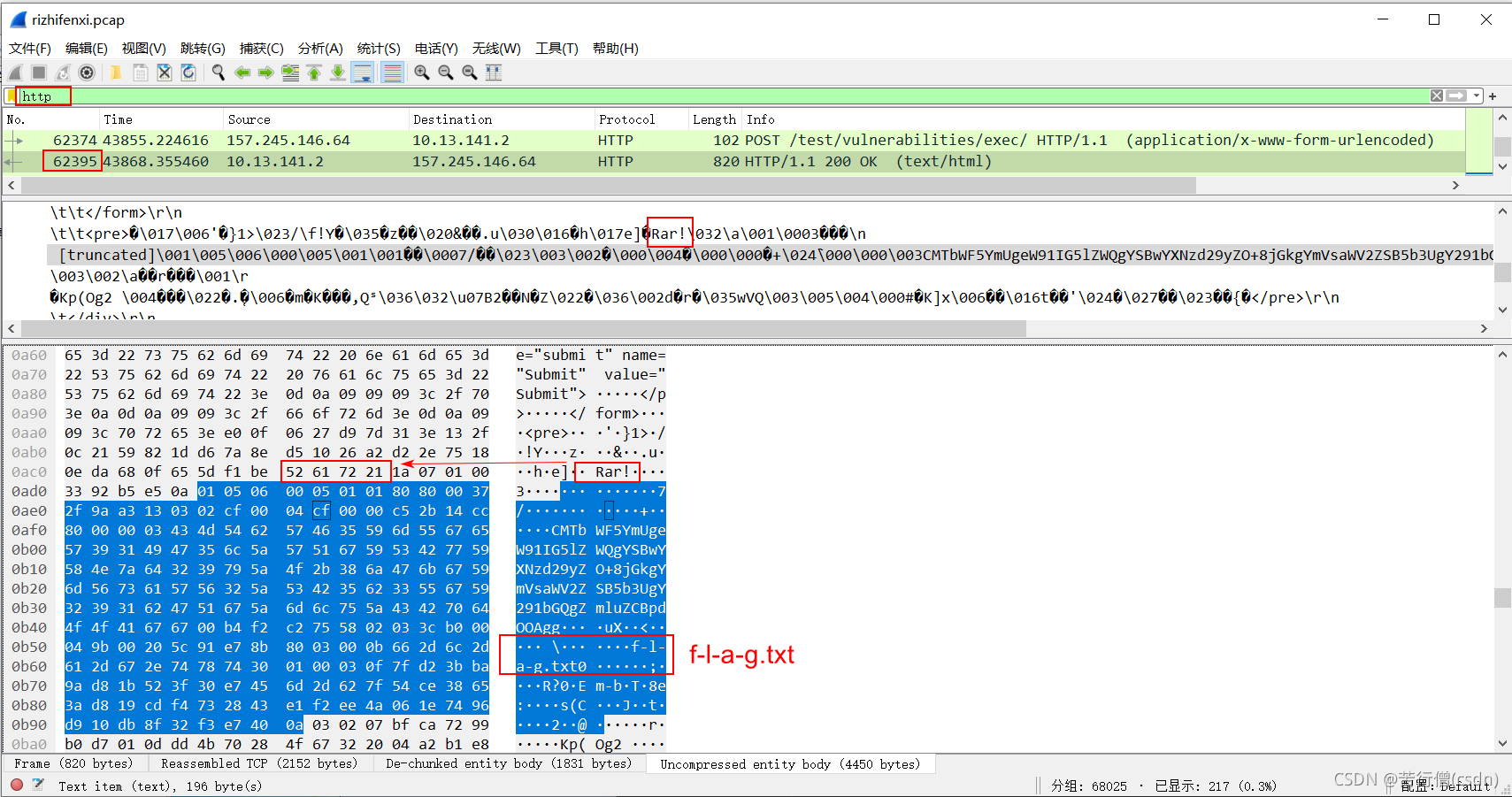
2021年中国工业互联网安全大赛核能行业赛道writeup之日志分析
附件题:日志分析 题目描述: 核电站新来的运维小王粗心把一个办公网地址映射到外网,遭到大量攻击,你能从日志当中找到有效信息吗。 附件下载: 2021-10-12T15_37_51.61064600_00rizhifenxi.rar-网络攻防文档类资源-CSD…

【POJ1509】Glass Beads 【后缀自动机】
题意 给出一个字符串,求它的最小表示法。 分析 这个题当然可以用最小表示法做啦!但是我是为了学后缀自动机鸭! 我们把这个字符串长度乘二,然后建SAM,然后在SAM上每次跑最小的那个字母,找出长度为n的时候就停…
order by总结
先在MySQL数据库里建一个表,并添加几条数据: create table student(id char(36) primary key,name varchar(8) not null,age int(3) default 0,mobile char(11),address varchar(150) ) insert into student values (9b4435ec-372c-456a-b287-e3c5aa23…
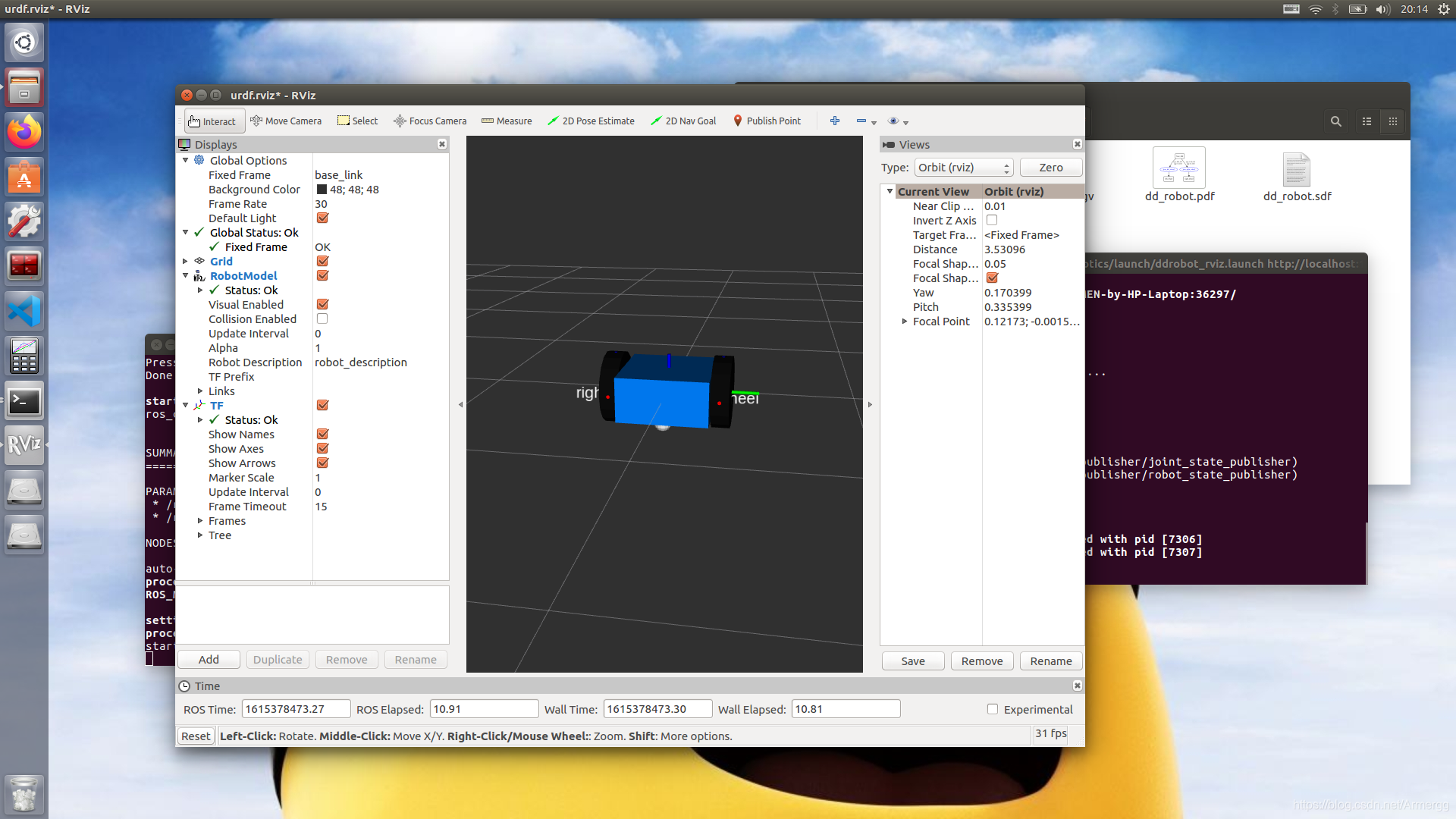
Gazebo构建小车模型并通过ROS控制
Gazebo构建小车模型并通过ROS控制介绍编写车子的URDF文件编写控制小车移动的插件(与ROS交互)结尾介绍 突然想试试Gazebo这款仿真软件,因为它可以让你在任何时候都有机器人玩。但Gazebo的机制也比较复杂,所以还是先学习一下如何搭一个简单的小车ÿ…

【杂项】SVN服务器的本地搭建和使用
转载于:https://www.cnblogs.com/haizhibin1989/p/6939025.html
编译vim-8.2并配置jedi-vim插件
目录 一、背景 二、编译vim-8.2 三、配置jedi-vim插件 3.1、安装插件vundle 3.2、用vundle安装jedi-vim插件 一、背景 CentOS 7.9上已经安装了anaconda,python3.7的虚拟环境webenv。现在编译安装vim-8.2,使之支持python3(yum装包是不支…
group by总结(还有having)
先在MySQL数据库里创建一个表,并添加几条数据用于测试: create table fruit(name varchar(4),address varchar(12),type_name varchar(6) )insert into fruit values (香蕉,广西,大香蕉); insert into fruit values (苹果,山东,红富士); insert into fr…
PHP数组基本的操作方法
1、数组操作的基本函数 数组的键和值: array_values($arr);获得数组的值 array_keys($arr);获得数组的键名 array_flip($arr);数组中的值与键名互换(如果有重复前面的会被后面的覆盖) in_array("apple",$arr);在数组中…
linux kafka进程挂了 自动重启
使用crontab,定时监控 kafka进程,发现挂了后重启。 shell脚本如下: #!/bin/sh source /etc/profile proc_dir"/data/kafka" # 程序目录 proc_name"kafka.Kafka" …
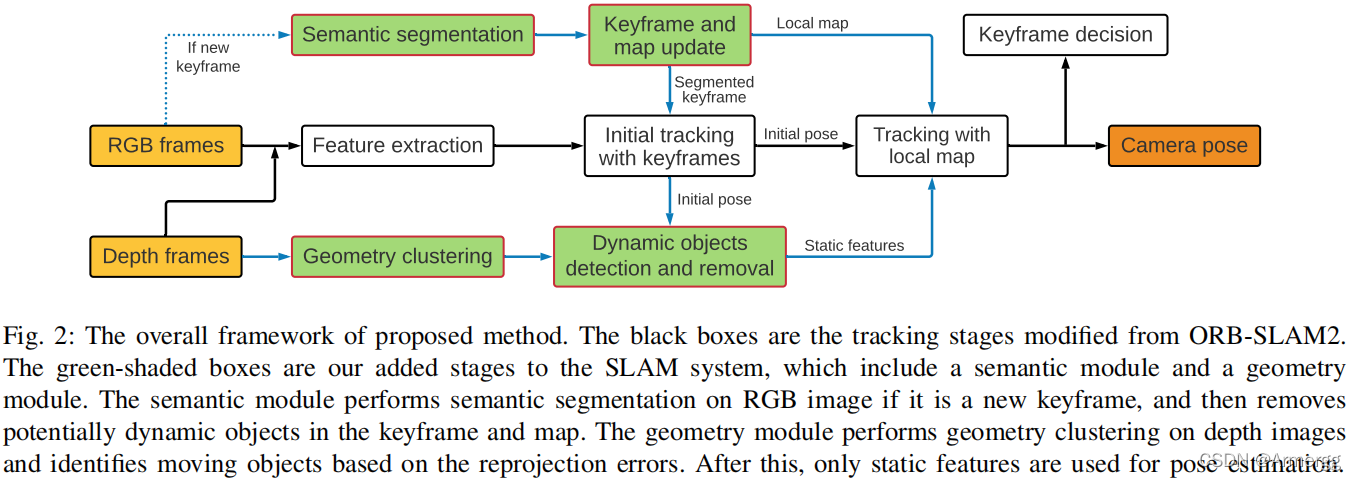
Towards Real-time Semantic RGB-D SLAM in Dynamic Environments(动态语义SLAM)
动态环境下的实时语义SLAM简介摘要系统流程实验结果总结简介 在ICRA 2021上看到这样一篇论文:Towards Real-time Semantic RGB-D SLAM in Dynamic Environments,发现它也是使用的语义网络基于深度图的多视图几何方法来去除图片中的动态对象的。这一方法和…
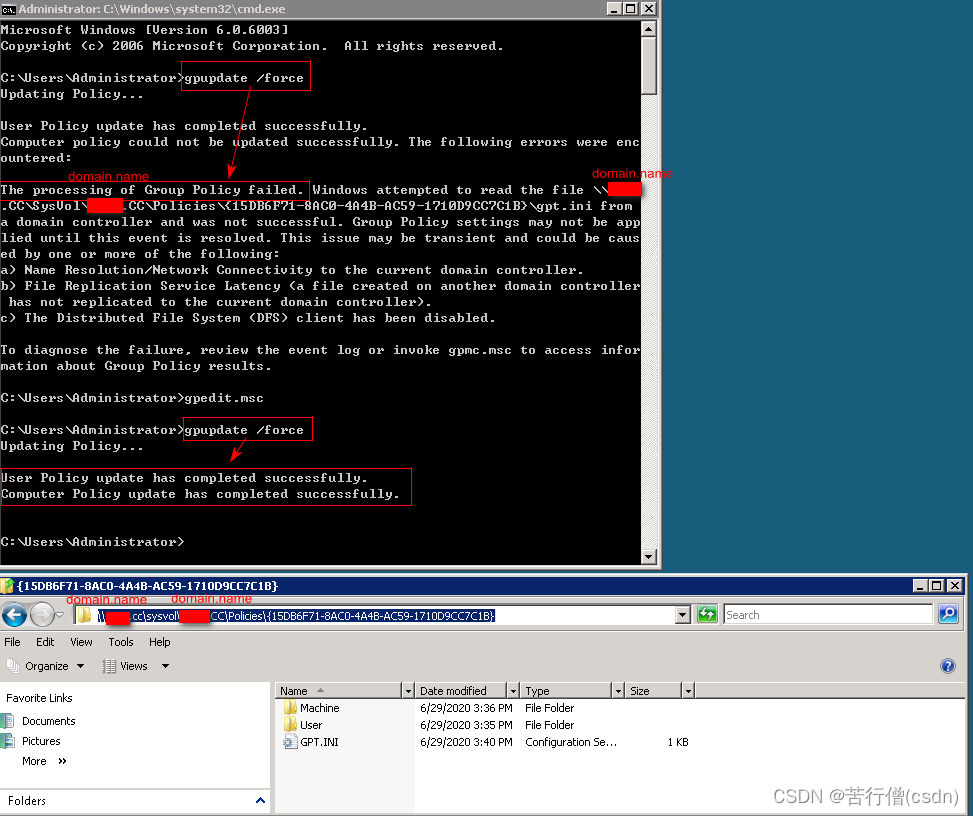
gpupdate /force 遇报错解决过程
windows server 2008 修改策略后,需要更新。在cmd中执行 gpupdate /force,遇到报错。报错内容为 The processing of Group Policy failed. Windows attempted to read the file \\<domain.name>\SysVol\<domain.name>\Policies\{xxxxxxxx-xx…
pytorch学习——torch.cat和torch.stack的区别
合并tensors torch.cat 沿着特定维数连接一系列张量。torch.stack 沿新维度连接一系列张量。 torch.cat 在给定维度中连接给定的 seq 个张量序列。 所有张量必须具有相同的形状(连接维度除外)或为空。 torch.cat(tensors, dim0, *, outNone) → Tens…
Docker将容器制作成镜像并提交到远程仓库
Docker将容器制作成镜像并提交到远程仓库 步骤如下 先在dockerhub上创建一个自己的用户https://hub.docker.com/。或者在阿里云也可以。 2. 然后先创建一个空的镜像名。 3. 在终端上登录。 4. 这里有一个容器ID为fe08a32503b1。想把它制作成镜像以备后期自己用。 5. 将容器制作…
关于子业之间相互取得元素或者方法
1.跳转是将页面name带过去 例子: url:"login.jsp?windowName"window.name; 传递参数到子页面 ,使得子页面能够通过名字返回数据 2.获取跳转到页面 window.top.frames[0].frames["${param.windowName}"].document转载于:…
windows 2008 (非R2)使用批处理文件调整组策略过程记录
2021年12月8日,对windows server 2008 (不是 windows server 2008 R2) 调整组策略。其中有一部分,无法通过图形界面(gpedit.msc)进行,只能在cmd用命令行执行。执行时遇到如下报错。 猜想是由于中…
【Leetcode】 刷题之路1(python)
leetcode 刷题之路1(python) 看到有大佬总结了一些相关题目,想着先刷一类。 1.两数之和15.三数之和16.最接近的三数之和11.盛最多的水18.四数之和454.四数相加II 1. 两数之和给定一个整数数组 nums 和一个整数目标值 target,请你…
MySQL数据库中的内置函数
SQL函数分为单行函数和多行函数: 单行函数: 红色标注的为重点。 … … … …字符串函数: … … … … … … … … … … 1.length() 存储长度 … … … … … … … … … … 2.char_length() 字符个数 … … … … … … … … … … 3.concat()首尾相连 … ……

elasticsearch从入门到出门-01windows上安装使用
elasticsearch 1、安装JDK,至少1.8.0_73以上版本,java -version2、下载和解压缩Elasticsearch安装包,目录结构3、启动Elasticsearch:bin\elasticsearch.bat,es本身特点之一就是开箱即用,如果是中小型应…
读django文档——Managing static files (e.g. images, JavaScript, CSS)
在上一篇读django文档——nginx uwsgi 部署django项目_苦行僧的妖孽日常-CSDN博客 部署django项目后,发现在runserver时都能正常部署的 static 文件都没有生效。查看文档解决该问题,记录这一过程。 If you use django.contrib.staticfiles as explaine…
pytorch中tensor.mul()和mm()和matmul()
tensor.mul tensor.mul和tensor * tensor 都是将矩阵的对应位置的元素相乘,因此要求维度相同,点乘torch.mul(input, other, *, outNone) → Tensor 参数: input (Tensor) – the input tensor. other (Tensor or Number) torch.mul(input, …

python学习笔记 day44 数据库三范式
参考自 https://www.cnblogs.com/wangfengming/articles/7929118.html 1. 数据库三范式概念: 为了建立减少冗余,结构合理的数据库,涉及数据库时必须要遵守一定的规则,在关系数据库中,这种规则就成为范式,范…
行内标签(最常用的:a标签、img标签、span标签)
a 标签: 功能: 从一个页面跳转到其他页面,或者是当前页面的其他位置。 属性: href :指定跳转的目标路径。 值可以是一个外部网站的地址;也可以是一个内部网页的地址 target: _self 默认值,在当…

SAP HR模块配置假期日历和缺勤类型
目录 一、配置假期日历 二、配置缺勤信息类型 2.1、定义缺勤类型 2.2、定义缺勤的计算规则 2.3、分配缺勤计算规则到缺勤类型 一、配置假期日历 SAP的HR模块中,业务顾问在实施的时候一般会配置未来10年的假期日历,到期后再进行配置。 延长假期日…