这可能是史上最全的Python算法集!

来源 | CSDN(ID:CSDNnews )
本文是一些机器人算法(特别是自动导航算法)的Python代码合集。
其主要特点有以下三点:选择了在实践中广泛应用的算法;依赖最少;容易阅读,容易理解每个算法的基本思想。希望阅读本文后能对你有所帮助。
前排友情提示,文章较长,建议收藏后再看。
目录
环境需求
怎样使用
本地化
扩展卡尔曼滤波本地化
无损卡尔曼滤波本地化
粒子滤波本地化
直方图滤波本地化
映射
高斯网格映射
光线投射网格映射
k均值物体聚类
圆形拟合物体形状识别
SLAM
迭代最近点匹配
EKF SLAM
FastSLAM 1.0
FastSLAM 2.0
基于图的SLAM
路径规划
动态窗口方式
基于网格的搜索
迪杰斯特拉算法
A*算法
势场算法
模型预测路径生成
路径优化示例
查找表生成示例
状态晶格规划
均匀极性采样(Uniform polar sampling)
偏差极性采样(Biased polar sampling)
路线采样(Lane sampling)
随机路径图(PRM)规划
Voronoi路径图规划
快速搜索随机树(RRT)
基本RRT
RRT*
基于Dubins路径的RRT
基于Dubins路径的RRT*
基于reeds-shepp路径的RRT*
Informed RRT*
批量Informed RRT*
三次样条规划
B样条规划
贝济埃路径规划
五次多项式规划
Dubins路径规划
Reeds Shepp路径规划
基于LQR的路径规划
Frenet Frame中的最优路径
路径跟踪
纯追迹跟踪
史坦利控制
后轮反馈控制
线性二次regulator(LQR)转向控制
线性二次regulator(LQR)转向和速度控制
项目支持
环境需求
Python 3.6.x
numpy
scipy
matplotlib
pandas
cvxpy 0.4.x
怎样使用
安装必要的库;
克隆本代码仓库;
执行每个目录下的python脚本;
如果你喜欢,则收藏本代码库:)
本地化
扩展卡尔曼滤波本地化
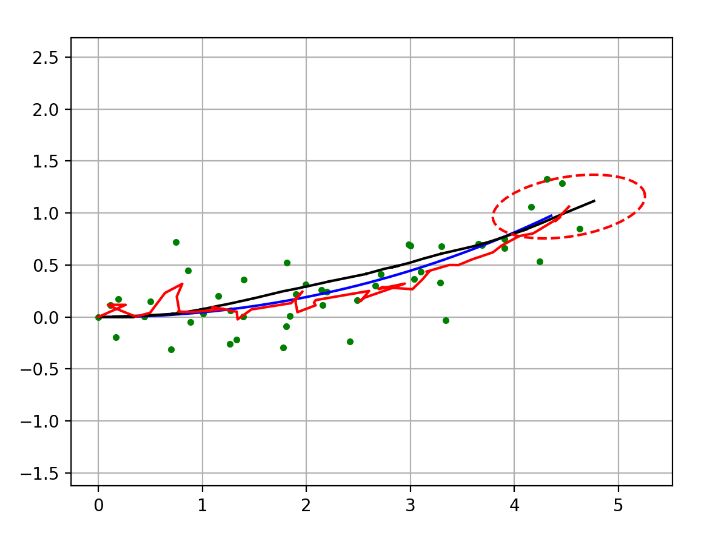
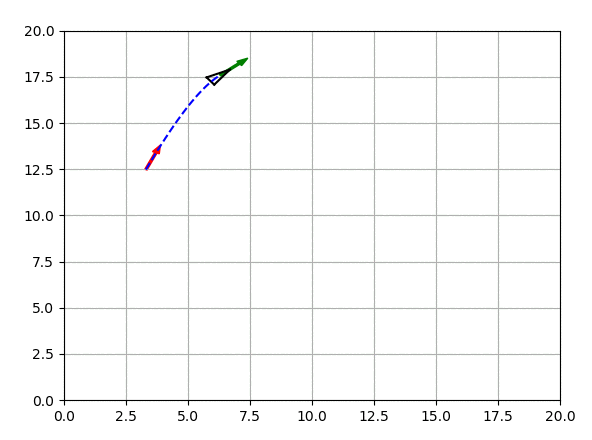
该算法利用扩展卡尔曼滤波器(Extended Kalman Filter, EKF)实现传感器混合本地化。
蓝线为真实路径,黑线为导航推测路径(dead reckoning trajectory),绿点为位置观测(如GPS),红线为EKF估算的路径。
红色椭圆为EKF估算的协方差。
相关阅读:
概率机器人学
http://www.probabilistic-robotics.org/
无损卡尔曼滤波本地化
该算法利用无损卡尔曼滤波器(Unscented Kalman Filter, UKF)实现传感器混合本地化。
线和点的含义与EKF模拟的例子相同。
相关阅读:
利用无差别训练过的无损卡尔曼滤波进行机器人移动本地化
https://www.researchgate.net/publication/267963417_Discriminatively_Trained_Unscented_Kalman_Filter_for_Mobile_Robot_Localization
粒子滤波本地化
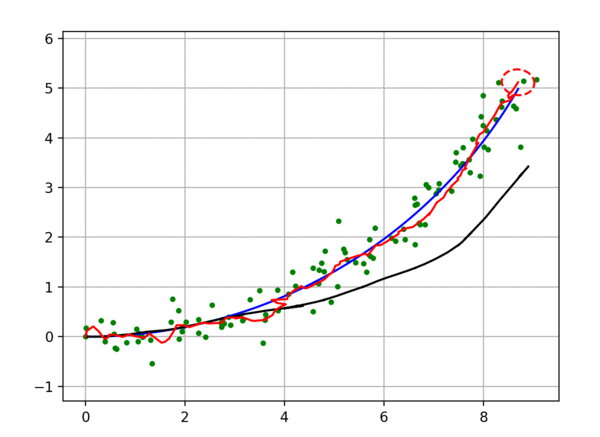
该算法利用粒子滤波器(Particle Filter, PF)实现传感器混合本地化。
蓝线为真实路径,黑线为导航推测路径(dead reckoning trajectory),绿点为位置观测(如GPS),红线为PF估算的路径。
该算法假设机器人能够测量与地标(RFID)之间的距离。
PF本地化会用到该测量结果。
相关阅读:
概率机器人学
http://www.probabilistic-robotics.org/
直方图滤波本地化
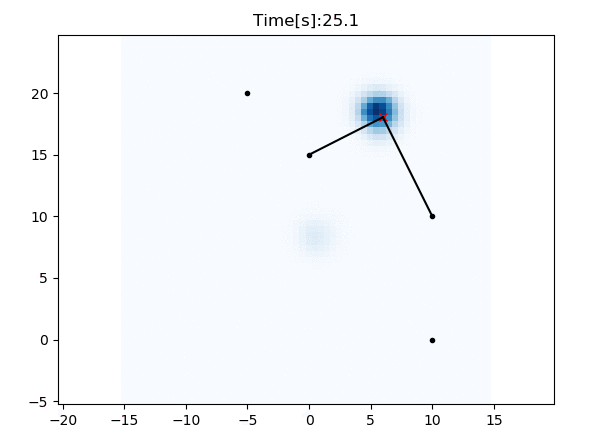
该算法是利用直方图滤波器(Histogram filter)实现二维本地化的例子。
红十字是实际位置,黑点是RFID的位置。
蓝色格子是直方图滤波器的概率位置。
在该模拟中,x,y是未知数,yaw已知。
滤波器整合了速度输入和从RFID获得距离观测数据进行本地化。
不需要初始位置。
相关阅读:
概率机器人学
http://www.probabilistic-robotics.org/
映射
高斯网格映射
本算法是二维高斯网格映射(Gaussian grid mapping)的例子。
光线投射网格映射
本算法是二维光线投射网格映射(Ray casting grid map)的例子。
k均值物体聚类
本算法是使用k均值算法进行二维物体聚类的例子。
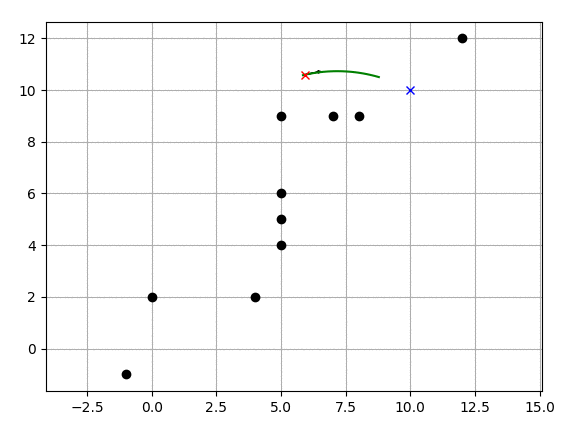
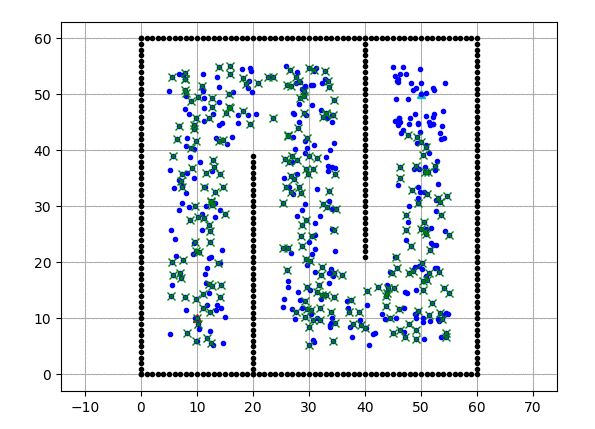
圆形拟合物体形状识别
本算法是使用圆形拟合进行物体形状识别的例子。
蓝圈是实际的物体形状。
红叉是通过距离传感器观测到的点。
红圈是使用圆形拟合估计的物体形状。
SLAM
同时本地化和映射(Simultaneous Localization and Mapping,SLAM)的例子。
迭代最近点匹配
本算法是使用单值解构进行二维迭代最近点(Iterative Closest Point,ICP)匹配的例子。
它能计算从一些点到另一些点的旋转矩阵和平移矩阵。
相关阅读:
机器人运动介绍:迭代最近点算法
https://cs.gmu.edu/~kosecka/cs685/cs685-icp.pdf
EKF SLAM
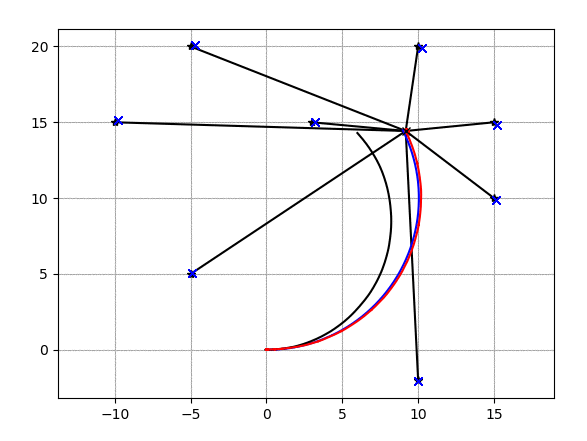
这是基于扩展卡尔曼滤波的SLAM示例。
蓝线是真实路径,黑线是导航推测路径,红线是EKF SLAM估计的路径。
绿叉是估计的地标。
相关阅读:
概率机器人学
http://www.probabilistic-robotics.org/
FastSLAM 1.0
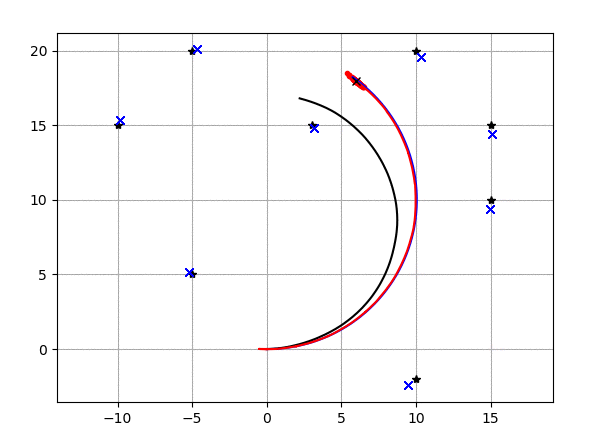
这是用FastSLAM 1.0进行基于特征的SLAM的示例。
蓝线是实际路径,黑线是导航推测,红线是FastSLAM的推测路径。
红点是FastSLAM中的粒子。
黑点是地标,蓝叉是FastLSAM估算的地标位置。
相关阅读:
概率机器人学
http://www.probabilistic-robotics.org/
FastSLAM 2.0
这是用FastSLAM 2.0进行基于特征的SLAM的示例。
动画的含义与FastSLAM 1.0的情况相同。
相关阅读:
概率机器人学
http://www.probabilistic-robotics.org/
Tim Bailey的SLAM模拟
http://www-personal.acfr.usyd.edu.au/tbailey/software/slam_simulations.htm
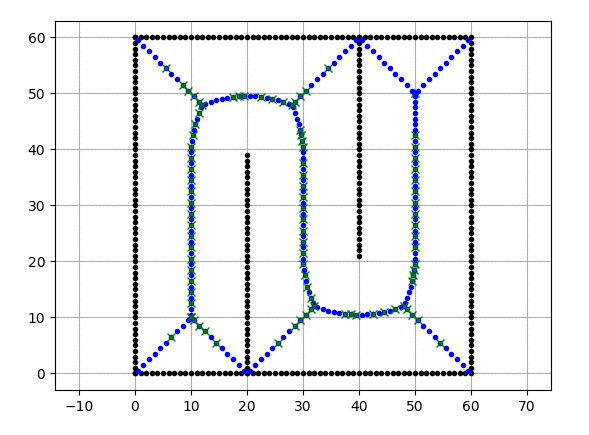
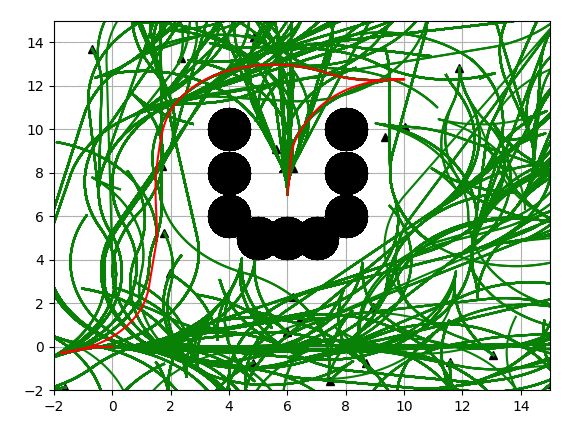
基于图的SLAM
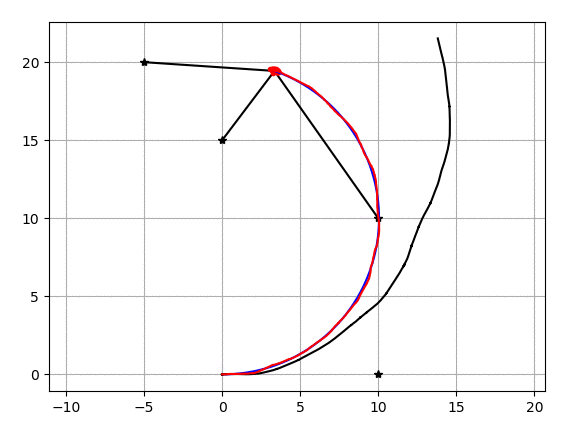
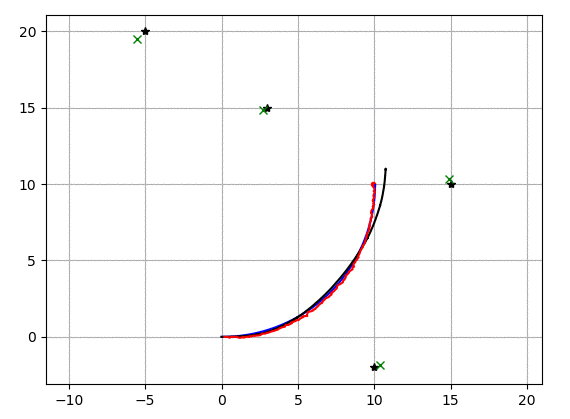
这是基于图的SLAM的示例。
蓝线是实际路径。
黑线是导航推测路径。
红线是基于图的SLAM估算的路径。
黑星是地标,用于生成图的边。
相关阅读:
基于图的SLAM入门
http://www2.informatik.uni-freiburg.de/~stachnis/pdf/grisetti10titsmag.pdf
路径规划
动态窗口方式
这是使用动态窗口方式(Dynamic Window Approach)进行二维导航的示例代码。
相关阅读:
用动态窗口方式避免碰撞
https://www.ri.cmu.edu/pub_files/pub1/fox_dieter_1997_1/fox_dieter_1997_1.pdf
基于网格的搜索
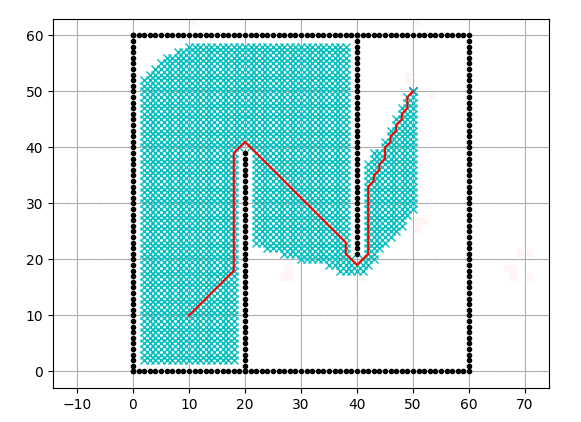
迪杰斯特拉算法
这是利用迪杰斯特拉(Dijkstra)算法实现的基于二维网格的最短路径规划。
动画中青色点为搜索过的节点。
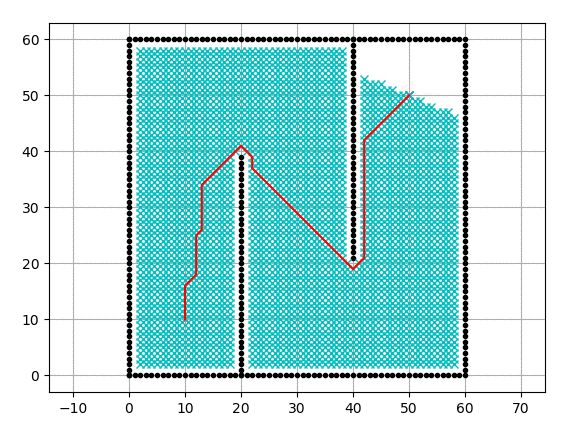
A*算法
下面是使用A星算法进行基于二维网格的最短路径规划。
动画中青色点为搜索过的节点。
启发算法为二维欧几里得距离。
势场算法
下面是使用势场算法进行基于二维网格的路径规划。
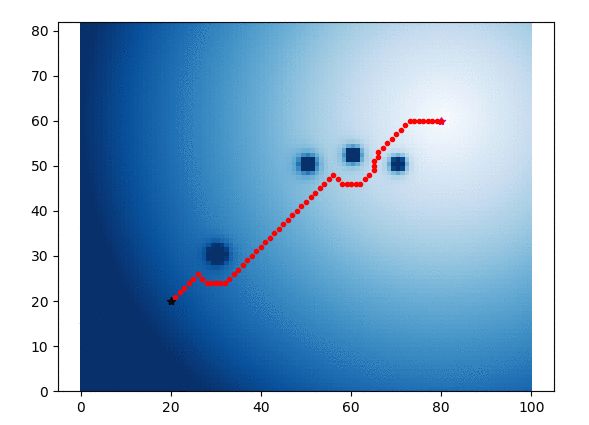
动画中蓝色的热区图显示了每个格子的势能。
相关阅读:
机器人运动规划:势能函数
https://www.cs.cmu.edu/~motionplanning/lecture/Chap4-Potential-Field_howie.pdf
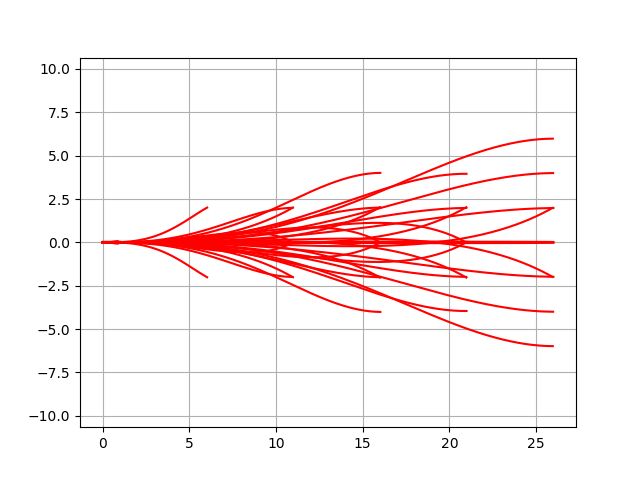
模型预测路径生成
下面是模型预测路径生成的路径优化示例。
算法用于状态晶格规划(state lattice planning)。
路径优化示例
查找表生成示例
相关阅读:
用于带轮子的机器人的最优不平整地形路径生成
http://journals.sagepub.com/doi/pdf/10.1177/0278364906075328
状态晶格规划
这个脚本使用了状态晶格规划(state lattice planning)实现路径规划。
这段代码通过模型预测路径生成来解决边界问题。
相关阅读:
用于带轮子的机器人的最优不平整地形路径生成
http://journals.sagepub.com/doi/pdf/10.1177/0278364906075328
用于复杂环境下的高性能运动机器人导航的可行运动的状态空间采样
http://www.frc.ri.cmu.edu/~alonzo/pubs/papers/JFR_08_SS_Sampling.pdf
均匀极性采样(Uniform polar sampling)
偏差极性采样(Biased polar sampling)
路线采样(Lane sampling)
随机路径图(PRM)规划
这个随机路径图(Probabilistic Road-Map,PRM)规划算法在图搜索上采用了迪杰斯特拉方法。
动画中的蓝点为采样点。
青色叉为迪杰斯特拉方法搜索过的点。
红线为PRM的最终路径。
相关阅读:
随机路径图
https://en.wikipedia.org/wiki/Probabilistic_roadmap
Voronoi路径图规划
这个Voronoi路径图(Probabilistic Road-Map,PRM)规划算法在图搜索上采用了迪杰斯特拉方法。
动画中的蓝点为Voronoi点。
青色叉为迪杰斯特拉方法搜索过的点。
红线为Voronoi路径图的最终路径。
相关阅读:
机器人运动规划
https://www.cs.cmu.edu/~motionplanning/lecture/Chap5-RoadMap-Methods_howie.pdf
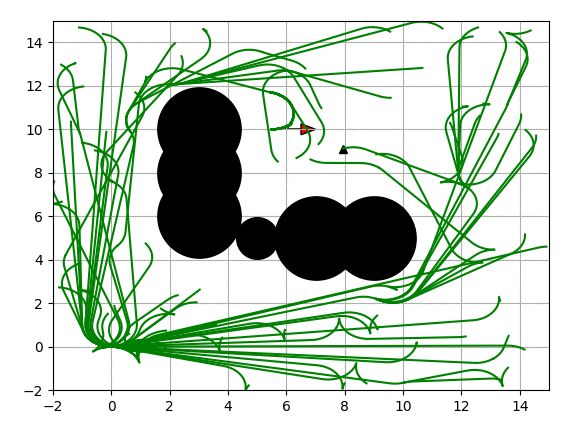
快速搜索随机树(RRT)
基本RRT
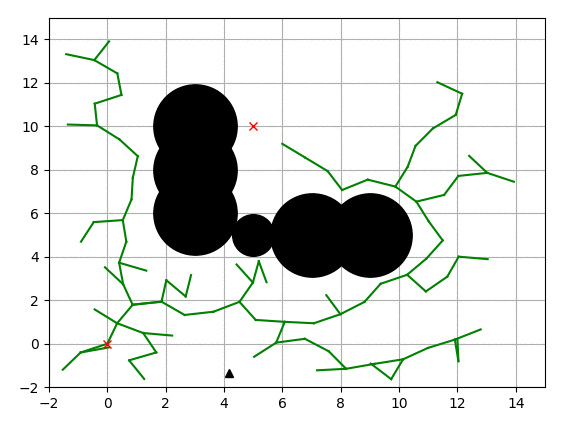
这是个使用快速搜索随机树(Rapidly-Exploring Random Trees,RRT)的简单路径规划代码。
黑色圆为障碍物,绿线为搜索树,红叉为开始位置和目标位置。
RRT*
这是使用RRT*的路径规划代码。
黑色圆为障碍物,绿线为搜索树,红叉为开始位置和目标位置。
相关阅读:
最优运动规划的基于增量采样的算法
https://arxiv.org/abs/1005.0416
最优运动规划的基于采样的算法
http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.419.5503&rep=rep1&type=pdf
基于Dubins路径的RRT
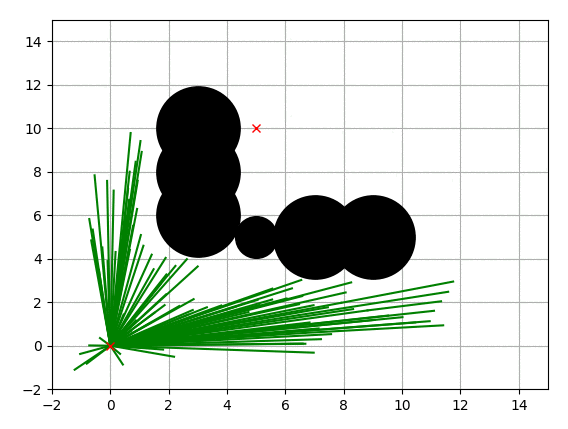
为汽车形机器人提供的使用RRT和dubins路径规划的路径规划算法。
基于Dubins路径的RRT*
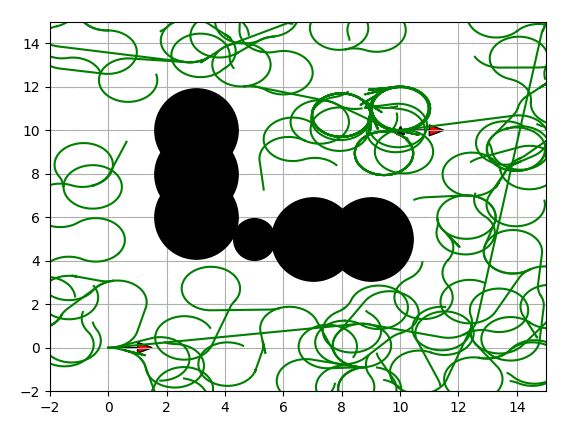
为汽车形机器人提供的使用RRT*和dubins路径规划的路径规划算法。
基于reeds-shepp路径的RRT*
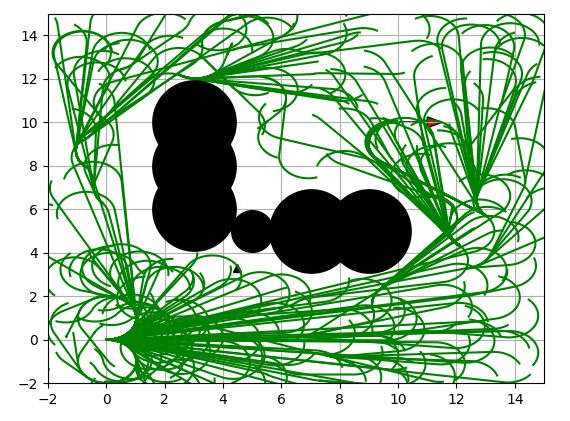
为汽车形机器人提供的使用RRT*和reeds shepp路径规划的路径规划算法。
Informed RRT*
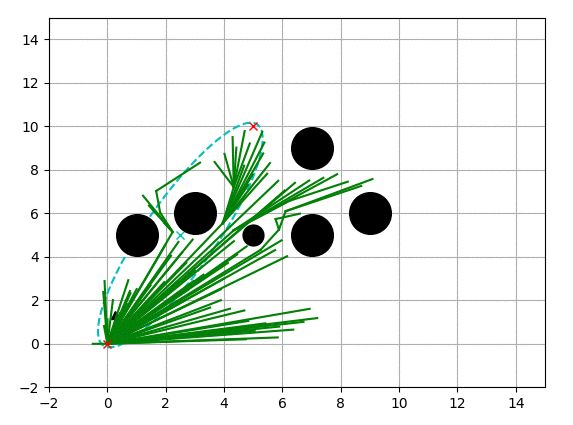
这是使用Informed RRT*的路径规划代码。
青色椭圆为Informed RRT*的启发采样域。
相关阅读:
Informed RRT*:通过对可接受的椭球启发的直接采样实现最优的基于采样的路径规划
https://arxiv.org/pdf/1404.2334.pdf
批量Informed RRT*
这是使用批量Informed RRT*的路径规划代码。
相关阅读:
批量Informed树(BIT*):通过对隐含随机几何图形进行启发式搜索实现基于采样的最优规划
https://arxiv.org/abs/1405.5848
闭合回路RRT*
使用闭合回路RRT*(Closed loop RRT*)实现的基于车辆模型的路径规划。
这段代码里,转向控制用的是纯追迹算法(pure-pursuit algorithm)。
速度控制采用了PID。
相关阅读:
使用闭合回路预测在复杂环境内实现运动规划
http://acl.mit.edu/papers/KuwataGNC08.pdf)
应用于自动城市驾驶的实时运动规划
http://acl.mit.edu/papers/KuwataTCST09.pdf
[1601.06326]采用闭合回路预测实现最优运动规划的基于采样的算法
https://arxiv.org/abs/1601.06326
LQR-RRT*
这是个使用LQR-RRT*的路径规划模拟。
LQR局部规划采用了双重积分运动模型。
相关阅读:
LQR-RRT*:使用自动推导扩展启发实现最优基于采样的运动规划
http://lis.csail.mit.edu/pubs/perez-icra12.pdf
MahanFathi/LQR-RRTstar:LQR-RRT*方法用于单摆相位中的随机运动规划
https://github.com/MahanFathi/LQR-RRTstar
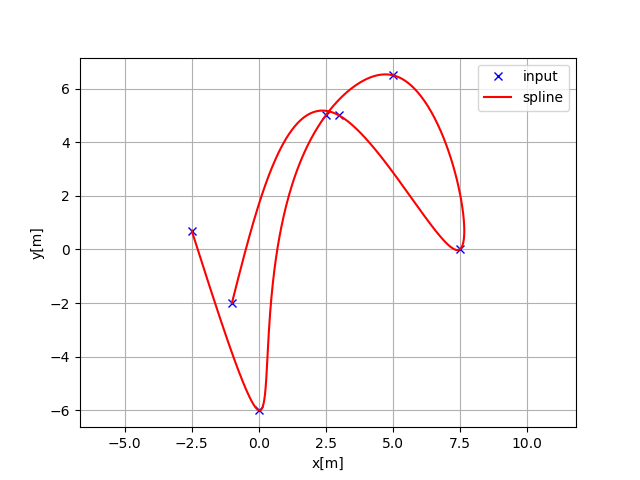
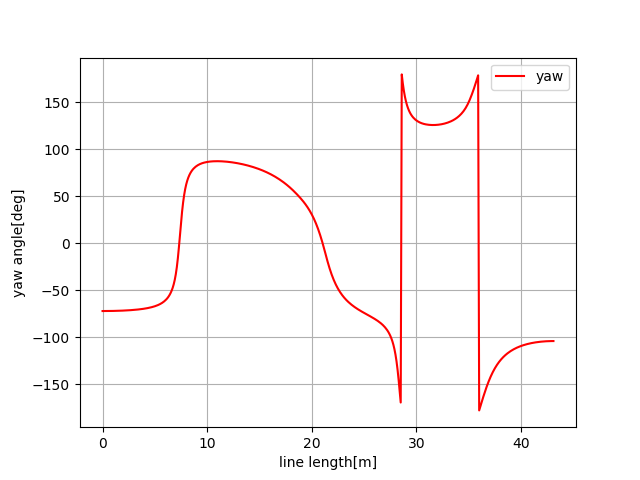
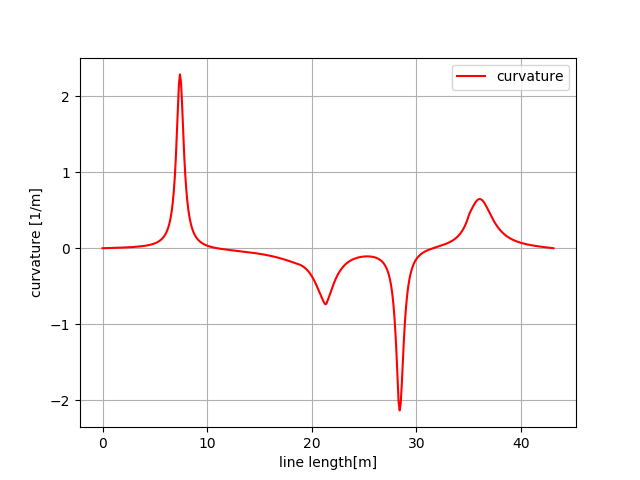
三次样条规划
这是段三次路径规划的示例代码。
这段代码根据x-y的路点,利用三次样条生成一段曲率连续的路径。
每个点的指向角度也可以用解析的方式计算。
B样条规划
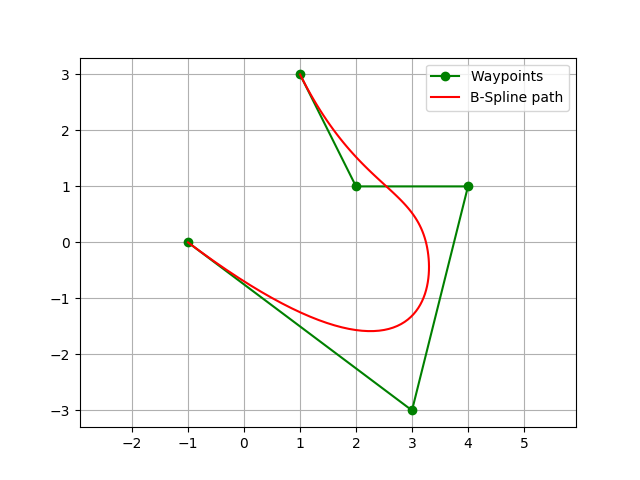
这是段使用B样条曲线进行规划的例子。
输入路点,它会利用B样条生成光滑的路径。
第一个和最后一个路点位于最后的路径上。
相关阅读:
B样条
https://en.wikipedia.org/wiki/B-spline
Eta^3样条路径规划
这是使用Eta ^ 3样条曲线的路径规划。
相关阅读:
\eta^3-Splines for the Smooth Path Generation of Wheeled Mobile Robots
https://ieeexplore.ieee.org/document/4339545/
贝济埃路径规划
贝济埃路径规划的示例代码。
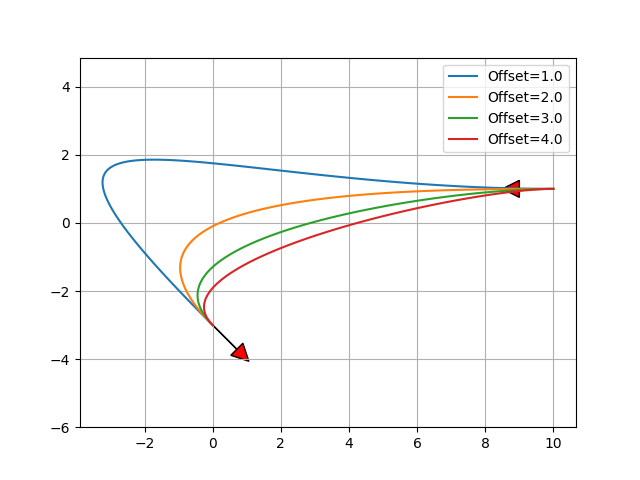
根据四个控制点生成贝济埃路径。
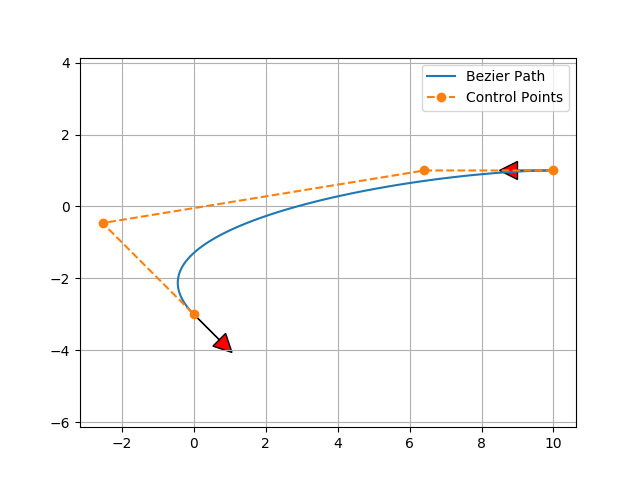
改变起点和终点的偏移距离,可以生成不同的贝济埃路径:
相关阅读:
根据贝济埃曲线为自动驾驶汽车生成曲率连续的路径
http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.294.6438&rep=rep1&type=pdf
五次多项式规划
利用五次多项式进行路径规划。
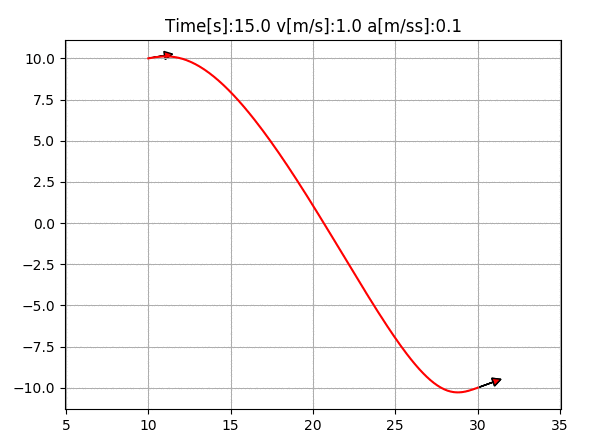
它能根据五次多项式计算二维路径、速度和加速度。
相关阅读:
用于Agv In定位的局部路径规划和运动控制
http://ieeexplore.ieee.org/document/637936/
Dubins路径规划
Dubins路径规划的示例代码。
相关阅读:
Dubins路径
https://en.wikipedia.org/wiki/Dubins_path
Reeds Shepp路径规划
Reeds Shepp路径规划的示例代码。
相关阅读:
15.3.2 Reeds-Shepp曲线
http://planning.cs.uiuc.edu/node822.html
用于能前进和后退的汽车的最优路径
https://pdfs.semanticscholar.org/932e/c495b1d0018fd59dee12a0bf74434fac7af4.pdf
ghliu/pyReedsShepp:实现Reeds Shepp曲线
https://github.com/ghliu/pyReedsShepp
基于LQR的路径规划
为双重积分模型使用基于LQR的路径规划的示例代码。
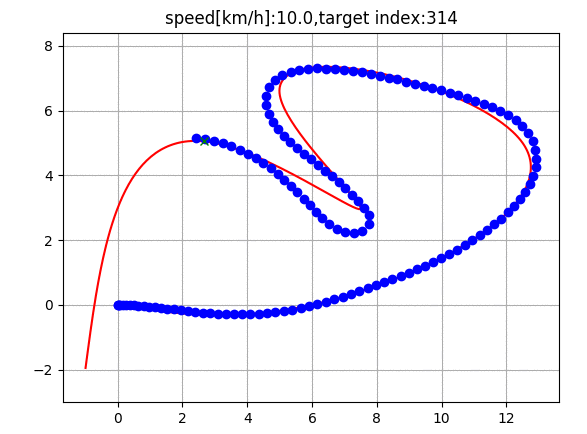
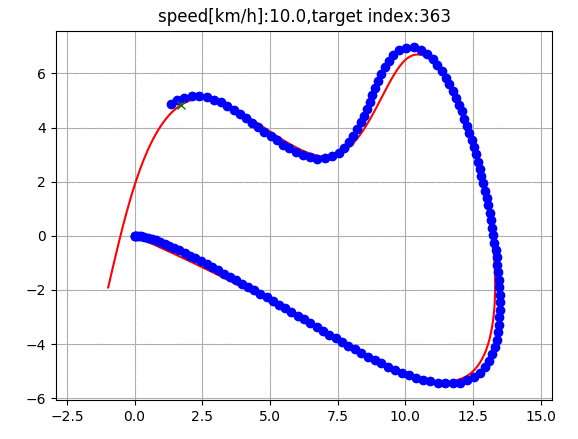
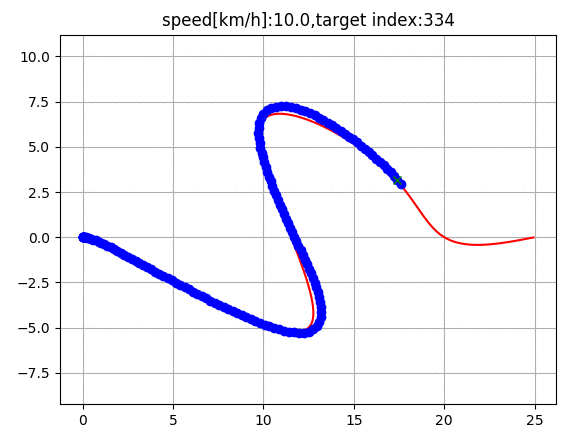
Frenet Frame中的最优路径
这段代码在Frenet Frame中生成最优路径。
青色线为目标路径,黑色叉为障碍物。
红色线为预测的路径。
相关阅读:
Frenet Frame中的动态接到场景中的最优路径生成
https://www.researchgate.net/profile/Moritz_Werling/publication/224156269_Optimal_Trajectory_Generation_for_Dynamic_Street_Scenarios_in_a_Frenet_Frame/links/54f749df0cf210398e9277af.pdf
Frenet Frame中的动态接到场景中的最优路径生成
https://www.youtube.com/watch?v=Cj6tAQe7UCY
路径跟踪
姿势控制跟踪
这是姿势控制跟踪的模拟。
相关阅读:
Robotics, Vision and Control - Fundamental Algorithms In MATLAB® Second, Completely Revised, Extended And Updated Edition | Peter Corke | Springer
https://www.springer.com/us/book/9783319544120
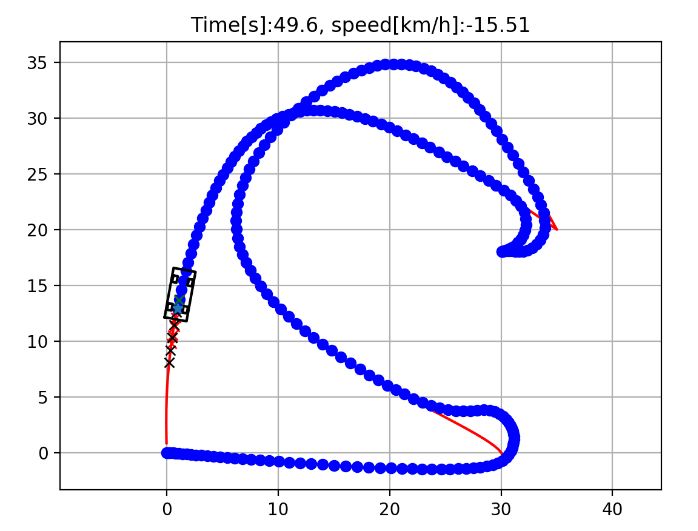
纯追迹跟踪
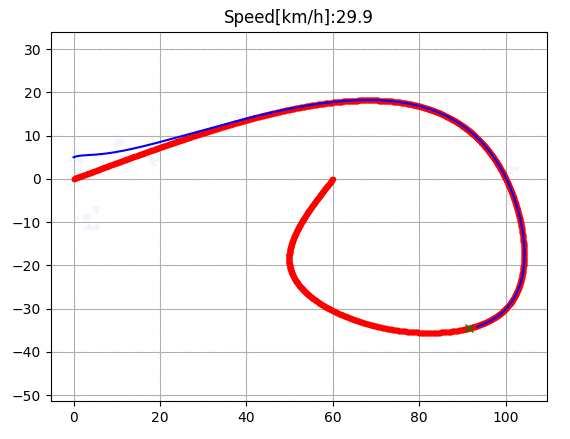
使用纯追迹(pure pursuit)转向控制和PID速度控制的路径跟踪模拟。
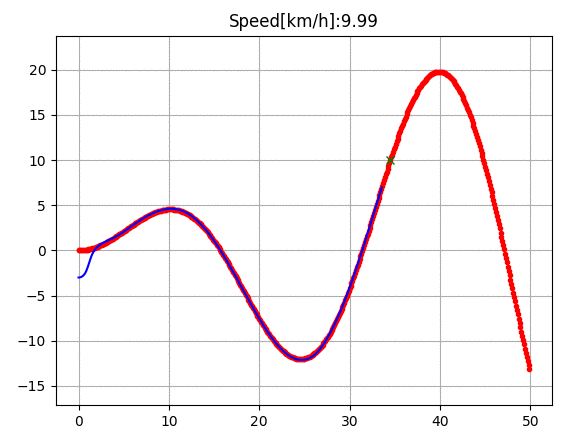
红线为目标路线,绿叉为纯追迹控制的目标点,蓝线为跟踪路线。
相关阅读:
城市中的自动驾驶汽车的运动规划和控制技术的调查
https://arxiv.org/abs/1604.07446
史坦利控制
使用史坦利(Stanley)转向控制和PID速度控制的路径跟踪模拟。
相关阅读:
史坦利:赢得DARPA大奖赛的机器人
http://robots.stanford.edu/papers/thrun.stanley05.pdf
用于自动驾驶机动车路径跟踪的自动转向方法
https://www.ri.cmu.edu/pub_files/2009/2/Automatic_Steering_Methods_for_Autonomous_Automobile_Path_Tracking.pdf
后轮反馈控制
利用后轮反馈转向控制和PID速度控制的路径跟踪模拟。
相关阅读:
城市中的自动驾驶汽车的运动规划和控制技术的调查
https://arxiv.org/abs/1604.07446
线性二次regulator(LQR)转向控制
使用LQR转向控制和PID速度控制的路径跟踪模拟。
相关阅读:
ApolloAuto/apollo:开源自动驾驶平台
https://github.com/ApolloAuto/apollo
线性二次regulator(LQR)转向和速度控制
使用LQR转向和速度控制的路径跟踪模拟。
相关阅读:
完全自动驾驶:系统和算法 - IEEE会议出版物
http://ieeexplore.ieee.org/document/5940562/
模型预测速度和转向控制
使用迭代线性模型预测转向和速度控制的路径跟踪模拟。
这段代码使用了cxvxpy作为最优建模工具。
相关阅读:
车辆动态和控制 | Rajesh Rajamani | Springer
http://www.springer.com/us/book/9781461414322
MPC课程资料 - MPC Lab @ UC-Berkeley
http://www.mpc.berkeley.edu/mpc-course-material
项目支持
可以通过Patreon(https://www.patreon.com/myenigma)对该项目进行经济支持。
如果你在Patreon上支持该项目,则可以得到关于本项目代码的邮件技术支持。
本文作者包括有Atsushi Sakai (@Atsushi_twi),Daniel Ingram,Joe Dinius,Karan Chawla,Antonin RAFFIN,Alexis Paques。
原文:
https://atsushisakai.github.io/PythonRobotics/#what-is-this
作者:AtsushiSakai,日本机器人工程师,从事自动驾驶技术开发,精通C++、ROS、MATLAB、Python、Vim和Robotics。
译者:弯月,责编:郭芮
(本文为AI科技大本营转载文章,转载请联系原作者)
精彩推荐

推荐阅读:
“安利”一款debug神器:在AI面前,bug都不是事儿
一键免费自动AI抠图,效果连PS大哥也点赞!
这可能是史上最全的Python算法集!
Python之父重回决策层,未来如何发展?
华为立 Flag:一年超越三星做全球智能手机老大!
那些简历造假拿 Offer 的程序员,后来都怎么样了?
被V神点赞, 我是如何用五子棋打败以太坊排名最高的应用的? |人物志
50个最有价值的数据可视化图表(推荐收藏)
2月报告:Python逆袭成功?踢馆Java,碾压C++!

点击“阅读原文”,查看历史精彩文章。
相关文章:

Emoji表情图标在iOS与PHP之间通信及MySQL存储
在某个 iOS 项目中,需要一个服务器来保存一些用户数据,例如用户信息、评论等,我们的服务器端使用了 PHPMySQL 的搭配。在测试过程中我们发现,用户在 iOS 端里输入了 Emoji 表情提交到服务器以后,PHP 无法在 MySQL 数据…
【linux】图形界面基础知识(X、X11、GNOME、Xorg、KDE的概念和它们之间的关系)
转载自:https://blog.csdn.net/zhangxinrun/article/details/7332049 简介 LINUX初学者经常分不清楚linux和X之间,X和Xfree86之间,X和KDE,GNOME等之间是什么关系。常常混淆概念,本文以比较易于理解的方式来解释X&…

DreamWeaver做ASP 第13页
第七步:修改资料篇 修改资料!首先要清醒一点,什么人才可以修改。 一,本人只能修改自己的;二,管理员可以修改所有人的。 那今天先来搞个可以修改自己资料的页面。 顺序是:先确认是正确登录&#…
【linux命令】setterm控制终端属性命令(中英文)
###setterm中文 SETTERM(1) 用户命令 SETTERM(1) 名字 setterm - 设置终端属性 概要 setterm [选项] 描述 setterm向终端写一个字符串到标准输出,调用终端的特定功能。在虚拟终端上使用,将会改变虚拟终端的输出特性。不支持的选项将被忽略。 选项 对…

搜狗分身技术再进化,让AI合成主播“动”起来
整理 | 一一出品 | AI科技大本营去年 11 月的互联网大会期间,搜狗与新华社联合发布全球首个AI合成主播一经亮相,引起了人们对“AI媒体”的广泛讨论。如今,搜狗 AI 合成主播不断更新迭代。2 月 19 日,在新华社新媒体中心与搜狗公司…
Angular http跨域
var app angular.module(Mywind,[ui.router]); app.controller(Myautumn,function($scope,$http,$filter){ //$http跨域 //服务端设置 // 访问权限 response.setHeader("Access-Control-Allow-Origin", "*"); // 访问类型 response.setHeader(&q…

文本分类step by step(二)
(注:如有转载请标明作者:finallyliuyu, 和出处:博客园) 《文本分类 step by step(一)》 在《文本分类step by step(一)》中,我们从处理语料库开始讲起,一直讲到利用分类器…
Centos7.4 版本环境下安装Mysql5.7操作记录
Centos7.x版本下针对Mysql的安装和使用多少跟之前的Centos6之前版本有所不同的,废话就不多赘述了,下面介绍下在centos7.x环境里安装mysql5.7的几种方法:一、yum方式安装 Centos7.x版本下针对Mysql的安装和使用多少跟之前的Centos6之前版本有所…

叫你一声“孙悟空”,敢答应么?
整理 | 一一出品 | AI科技大本营(ID:rgznai100)随着自然语言理解等技术的发展,对话机器人如今盛行,而基于此的智能音箱产品的发展也异常火热。很多开发者一般热衷于在一些对话机器人平台上开发相应的语音技能,但也有不…
【linux】Matchbox(一):启动脚本
脚本执行顺序 启动X服务器 /etc/rc5.d/S01xserver-nodm --> …/init.d/xserver-nodm–> 对应进程: /bin/sh /etc/rc5.d/S01xserver-nodm start background xinit /etc/X11/Xsession–> 对应进程: xinit /etc/X11/Xsession – /usr/bin/Xorg …
java试用(1)hello world
设置环境变量path H:\soft\j2sdk1.4.2_17\bin;H:\soft\eclipse;%path%set CLASSPATH.;H:\soft\j2sdk1.4.2_17\jre\lib;JAVA_HOME: D:\jdk1.5.0PATH: D:\jdk1.5.0\bin;编写程序 Noname1.java (注意:文件名要和class名一样)class Noname1 { public static void…

GAN性能不稳?这九大技术可“镇住”四类缺陷
作者 | Bharath Raj译者 | ang010ela编辑 | 一一出品 | AI科技大本营尽管 GAN 领域的进步令人印象深刻,但其在应用过程中仍然存在一些困难。本文梳理了 GAN 在应用过程中存在的一些难题,并提出了最新的解决方法。使用 GAN 的缺陷众所周知,GAN…

java正则表达式获取指定两个字符串之间内容
xml解析利用正则表达式获取指定两个字符串之间内容 在遇到解析复杂xml的时候,想到大家所想到的都是利用dom4j作为首发工具,但是当遇到层次很多,较为复杂,我们难道还需要从根节点一层一层的解析下去吗?此时不仅代码繁琐…
【linux】Matchbox(二):基本概念
X server X server是Linux系统里面图形接口服务器的简称。Windows系统的界面是这个系统不可分割的一部分,各种窗口操作界面显示都是由系统核心直接管理的,而Linux的图形界面并不是系统的必要组成部分,它可以在无界面的条件下运行。当需要Lin…

Android 控件之ImageSwitcher图片切换器
ImageSwitcher是Android中控制图片展示效果的一个控件,如:幻灯片效果...,颇有感觉啊。做相册一绝 源码下载 一、重要方法 setImageURI(Uri uri):设置图片地址 setImageResource(int resid):设置图片资源库 setImageDra…
【Qt】Qt5.x移植后的环境配置(imx6)
1、环境配置脚本如下 #!/bin/shexport QTDIR=/usr/lib/qt5 export QT_QPA_PLATFORM_PLUGIN_PATH=$QTDIR/plugins export QT_QPA_PLATFORM=eglfs:fb=/dev/fb0 export QT_QPA_GENERIC_PLUGINS=evdevtouch:/dev/input/event1 export QT_QPAFONTDIR=/usr/lib/fonts export QML2_IM…

程序员如何避免“滴滴式裁员”悲剧?
作者 | 徐麟转载自数据森麟(ID:shujusenlin)滴滴于2月15日正式发表裁员公告,想必很多互联网人的朋友圈都已经被这条消息刷屏了,其中最常见的莫过于下面这张图了:此图一出,广大互联网吃瓜群众不禁后背发凉&a…
windows服务搭建及命令总结
1、图解FTP服务器搭建(Windows Server 2008) https://wenku.baidu.com/view/803bdc1759eef8c75fbfb361.html?fromsearch https://www.cnblogs.com/john2017/p/6269671.html 2、WindowsServer2008下搭建ApachePHPMySQL https://wenku.baidu.com/view/2e82b99ea1116c175f0e7cd18…
Linux下的CST和UTC时间的区别
在linux中,用date查看时间的时候显示:2008年 12月 17日 星期三 09:04:14 CSTCST China Standard Time UTC8:00 中国沿海时间(北京时间)世界协调时间(Universal Time Coordinated,UTC)GPS 系统中有两种时间区分,一为UTC,另一为LT&a…
Python之父重回决策层,未来如何发展?
作者 | 豌豆花下猫来源 | Python猫(ID:python_cat)春节假期结束了,大家陆续地重回到原来的生活轨道上。假期是一个很好的休息与调节的机会,同时,春节还有辞旧迎新的本意,它是新的轮回的开端。在…
【Android】adb命令总结
1、adb version 显示ADB工具版本 2、adb devices 查询设备,显示设备序列号 3、adb sideload < file_location> 通过USB进行ROM刷机 4、adb install < apk文件路径> 安装APK 5、adb uninstall <软件名> 卸载软件 6、adb push <本地路径>…
MySQL中char与varchar的区别
字符与字节的区别 一个字符由于所使用的字符集的不同,会并存储在一个或多个字节中,所以一个字符占用多少个字节取决于所使用的字符集注意:char与varchar后面接的数据大小为存储的字符数,而不是字节数(其实是5.0版本以上…
怎样在Red Hat Enterprise Linux 5.4版本上安装GCC?
注意:如果打算使用GUI的方式安装,需要导入GPG-Key(否则在使用GUI时会出现public key for *.rpm is not installed) 请切换到安装光盘目录下: cd /media 可以看到 RHEL* 的目录,然后切换到这个目录中: cd RHEL* 你需要运…
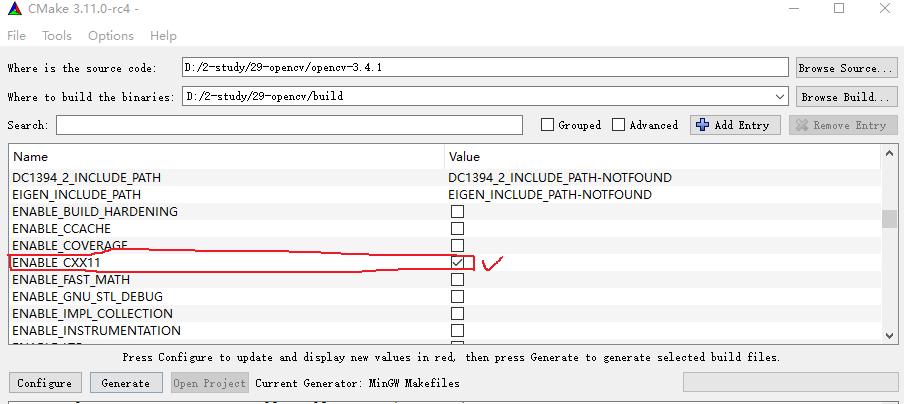
【C++】mingw32-make+cmake:error: ‘nullptr‘ was not declared in this scope解决方法
###问题 使用cmake成功(Configuring done Generating done)后,在cmd终端中执行 mingw32-make报错: error: nullptr was not declared in this scope###原因 nullptr是在c11的新内容。编译时,没有添加对C11的支持。 解…

喜得爱女,吴恩达深情撰文:欢迎你来到新世界!
整理 | 琥珀出品 | AI科技大本营(ID:rgznai100)一个月前,吴恩达冷不丁在Twitter放出了重磅消息: “我们的最新‘成果’ Baby Ng 即将诞生!2019 年 2 月见面!”果然,昨日吴恩达公开了首个小公主降…
FastJson 简单使用
对象、List转JsonUser user new User(); /*JSON 序列化,默认序列化出的JSON字符串中键值对是使用双引号,如果需要单引号的JSON字符串, [eg:String jsonString JSON.toJSONString(map, SerializerFeature.UseSingleQuotes);] *fastjson序…
【数据安全案例】交警计算机系统再遭***,交通违法记录随意删除
根据新浪报道,据新华社10月14日电 利用当网管的机会,破解密码,非法进入交警计算机系统为他人删除车辆交通违法记录牟利。辽宁省鞍山市铁西区检察院透露,当地某公司员工程尚军因涉嫌破坏计算机信息系统罪,已于10月初被依…

开源,还能走多远?
【编者按】在各大厂纷纷拥抱开源的当口,“开源代码面临可持续发展危机”的言论也甚嚣尘上。早期,技术爱好者们“用爱发电”,“他们知道在出问题前,没人会注意到他们,没人会重视他们”。但遗憾的是,很长一段…

使用axis开发web service服务端
一、axis环境搭建 1.安装环境 JDK、Tomcat或Resin、eclipse等. 2.到 http://www.apache.org/dyn/closer.cgi/ws/axis/1_4 下载Axis的jar包 3.将Axis的jar包放入WEB-INF/lib目录下 二、编写web service服务端 1.编写服务 package com.webservice;public class HelloWebservice {…
【Qt】qt打印文件名、函数名、行号
#include <QDebug> #define MyDebug qDebug()<<"[FILE:"<<__FILE__<<",LINE"<<__LINE__<<",FUNC"<<__FUNCTION__<<"]