边缘检测、Hough变换、轮廓提取、种子填充、轮廓跟踪
转自:http://blog.sina.com.cn/s/blog_6c083cdd0100nm4s.html
7.1 边沿检测
我们给出一个模板 ![]() 和一幅图象
和一幅图象  。不难发现原图中左边暗,右边亮,中间存在着一条明显的边界。进行模板操作后的结果如下:
。不难发现原图中左边暗,右边亮,中间存在着一条明显的边界。进行模板操作后的结果如下:  。
。
可以看出,第3、4列比其他列的灰度值高很多,人眼观察时,就能发现一条很明显的亮边,其它区域都很暗,这样就起到了边沿检测的作用。
为什么会这样呢?仔细看看那个模板就明白了,它的意思是将右邻点的灰度值减左邻点的灰度值作为该点的灰度值。在灰度相近的区域内,这么做的结果使得该点的灰度值接近于0;而在边界附近,灰度值有明显的跳变,这么做的结果使得该点的灰度值很大,这样就出现了上面的结果。
这种模板就是一种边沿检测器,它在数学上的涵义是一种基于梯度的滤波器,又称边沿算子,你没有必要知道梯度的确切涵义,只要有这个概念就可以了。梯度是有方向的,和边沿的方向总是正交(垂直)的,例如,对于上面那幅图象的转置图象,边是水平方向的,我们可以用梯度是垂直方向的模板 ![]() 检测它的边沿。
检测它的边沿。
例如,一个梯度为45度方向模板  ,可以检测出135度方向的边沿。
,可以检测出135度方向的边沿。
1. Sobel算子
在边沿检测中,常用的一种模板是Sobel 算子。Sobel 算子有两个,一个是检测水平边沿的  ;另一个是检测垂直平边沿的
;另一个是检测垂直平边沿的  。与
。与  和
和  相比,Sobel算子对于象素的位置的影响做了加权,因此效果更好。
相比,Sobel算子对于象素的位置的影响做了加权,因此效果更好。
Sobel算子另一种形式是各向同性Sobel(Isotropic Sobel)算子,也有两个,一个是检测水平边沿的  ,另一个是检测垂直平边沿的
,另一个是检测垂直平边沿的  。各向同性Sobel算子和普通Sobel算子相比,它的位置加权系数更为准确,在检测不同方向的边沿时梯度的幅度一致。
。各向同性Sobel算子和普通Sobel算子相比,它的位置加权系数更为准确,在检测不同方向的边沿时梯度的幅度一致。
下面的几幅图中,图7.1为原图;图7.2为普通Sobel算子处理后的结果图;图7.3为各向同性Sobel算子处理后的结果图。可以看出Sobel算子确实把图象中的边沿提取了出来。

图7.1 原图

图7.2 普通Sobel算子处理后的结果图

图7.3 各向同性Sobel算子处理后的结果图
在程序中仍然要用到第3章介绍的通用3×3模板操作函数TemplateOperation,所做的操作只是增加几个常量标识及其对应的模板数组,这里就不再给出了。
2. 高斯拉普拉斯算子
由于噪声点(灰度与周围点相差很大的点)对边沿检测有一定的影响,所以效果更好的边沿检测器是高斯拉普拉斯(LOG)算子。它把我们在第3章中介绍的高斯平滑滤波器和拉普拉斯锐化滤波器结合了起来,先平滑掉噪声,再进行边沿检测,所以效果会更好。
常用的LOG算子是5×5的模板,如下所示  。到中心点的距离与位置加权系数的关系用曲线表示为图7.4。是不是很象一顶墨西哥草帽?所以,LOG又叫墨西哥草帽滤波器。
。到中心点的距离与位置加权系数的关系用曲线表示为图7.4。是不是很象一顶墨西哥草帽?所以,LOG又叫墨西哥草帽滤波器。

图7.4 LOG到中心点的距离与位置加权系数的关系曲线
图7.5为图7.1用LOG滤波器处理后的结果。

图7.5 图7.1用LOG滤波器处理后的结果图
LOG的算法和普通模板操作的算法没什么不同,只不过把3×3改成了5×5,这里就不再给出了。读者可以参照第3章的源程序自己来完成。
7.2 Hough变换
Hough变化的原理是利用点和线的对偶性,将原始空间的给定的曲线通过曲线表达式变为参数空间的一个点。在原始图像坐标系下的一个点对应参数坐标系中的一条直线,同样参数坐标系的一条直线对应原始坐标中的一个点。原始坐标中呈现直线的所有点,它们的斜率和截距是相同的,所以他们在参数坐标下对应于同一个点。
首先,初始化一块缓冲徐,对应于参数平面,将所有的数据置0,对于图像的每一个前景点,求出参数平面对应的直线,把直线上所有的点都加1,最后找到参数平面最大的点的位置,这个位置就是原图像直线上的参数。
Hough变换用来在图象中查找直线。它的原理很简单:假设有一条与原点距离为s,方向角为θ的一条直线,如图7.6所示。

图7.6 一条与原点距离为s,方向角为θ的一条直线
直线上的每一点都满足方程
![]()
(7.1)
利用这个事实,我们可以找出某条直线来。下面将给出一段程序,用来找出图象中最长的直线(见图7.7)。找到直线的两个端点,在它们之间连一条红色的直线。为了看清效果,将结果描成粗线,如图7.8所示。
图7.7 原图 |
图7.8 Hough变换的结果 |


可以看出,找到的确实是最长的直线。方法是,开一个二维数组做为计数器,第一维是角度,第二维是距离。先计算可能出现的最大距离为 ![]() ,用来确定数组第二维的大小。对于每一个黑色点,角度的变化范围从00到1780(为了减少存储空间和计算时间,角度每次增加20而不是10),按方程(7.1)求出对应的距离s来,相应的数组元素[s][
,用来确定数组第二维的大小。对于每一个黑色点,角度的变化范围从00到1780(为了减少存储空间和计算时间,角度每次增加20而不是10),按方程(7.1)求出对应的距离s来,相应的数组元素[s][ ![]() ]加1。同时开一个数组Line,计算每条直线的上下两个端点。所有的象素都算完后,找到数组元素中最大的,就是最长的那条直线。直线的端点可以在Line中找到。要注意的是,我们处理的虽然是二值图,但实际上是256级灰度图,不过只用到了0和255两种颜色。
]加1。同时开一个数组Line,计算每条直线的上下两个端点。所有的象素都算完后,找到数组元素中最大的,就是最长的那条直线。直线的端点可以在Line中找到。要注意的是,我们处理的虽然是二值图,但实际上是256级灰度图,不过只用到了0和255两种颜色。
BOOL Hough(HWND hWnd)
{
//定义一个自己的直线结构
typedef struct{
int topx; //最高点的x坐标
int topy; //最高点的y坐标
int botx; //最低点的x坐标
int boty; //最低点的y坐标
}MYLINE;
DWORD OffBits,BufSize;
LPBITMAPINFOHEADER lpImgData;
LPSTR lpPtr;
HDC hDc;
LONG x,y;
long i,maxd;
int k;
int Dist,Alpha;
HGLOBAL hDistAlpha,hMyLine;
Int *lpDistAlpha;
MYLINE *lpMyLine,*TempLine,MaxdLine;
static LOGPEN rlp={PS_SOLID,1,1,RGB(255,0,0)};
HPEN rhp;
//我们处理的实际上是256级灰度图,不过只用到了0和255两种颜色。
if( NumColors!=256){
MessageBox(hWnd,"Must be a mono bitmap with grayscale palette!",
"Error Message",MB_OK|MB_ICONEXCLAMATION);
return FALSE;
}
//计算最大距离
Dist=(int)(sqrt((double)bi.biWidth*bi.biWidth+
(double)bi.biHeight*bi.biHeight)+0.5);
Alpha=180 /2 ; //0 到 to 178 度,步长为2度
//为距离角度数组分配内存
if((hDistAlpha=GlobalAlloc(GHND,(DWORD)Dist*Alpha*
sizeof(int)))==NULL){
MessageBox(hWnd,"Error alloc memory!","Error Message",
MB_OK|MB_ICONEXCLAMATION);
return FALSE;
}
//为记录直线端点的数组分配内存
if((hMyLine=GlobalAlloc(GHND,(DWORD)Dist*Alpha*
sizeof(MYLINE)))==NULL){
GlobalFree(hDistAlpha);
return FALSE;
}
OffBits=bf.bfOffBits-sizeof(BITMAPFILEHEADER);
//BufSize为缓冲区大小
BufSize=OffBits+bi.biHeight*LineBytes;
lpImgData=(LPBITMAPINFOHEADER)GlobalLock(hImgData);
lpDistAlpha=(int *)GlobalLock(hDistAlpha);
lpMyLine=(MYLINE *)GlobalLock(hMyLine);
for (i=0;i<(long)Dist*Alpha;i++){
TempLine=(MYLINE*)(lpMyLine+i);
(*TempLine).boty=32767; //初始化最低点的y坐标为一个很大的值
}
for (y=0;y<bi.biHeight;y++){
//lpPtr指向位图数据
lpPtr=(char *)lpImgData+(BufSize-LineBytes-y*LineBytes);
for (x=0;x<bi.biWidth;x++)
if(*(lpPtr++)==0) //是个黑点
for (k=0;k<180;k+=2){
//计算距离i
i=(long)fabs((x*cos(k*PI/180.0)+y*sin(k*PI/180.0)));
//相应的数组元素加1
*(lpDistAlpha+i*Alpha+k/2)=*(lpDistAlpha+i*Alpha+k/2)+1;
TempLine=(MYLINE*)(lpMyLine+i*Alpha+k/2);
if(y> (*TempLine).topy){
//记录该直线最高点的x,y坐标
(*TempLine).topx=x;
(*TempLine).topy=y;
}
if(y< (*TempLine).boty){
//记录该直线最低点的x,y坐标
(*TempLine).botx=x;
(*TempLine).boty=y;
}
}
}
maxd=0;
for (i=0;i<(long)Dist*Alpha;i++){
TempLine=(MYLINE*)(lpMyLine+i);
k=*(lpDistAlpha+i);
if(k > maxd){
//找到数组元素中最大的,及相应的直线端点
maxd=k;
MaxdLine.topx=(*TempLine).topx;
MaxdLine.topy=(*TempLine).topy;
MaxdLine.botx=(*TempLine).botx;
MaxdLine.boty=(*TempLine).boty;
}
}
hDc = GetDC(hWnd);
rhp = CreatePenIndirect(&rlp);
SelectObject(hDc,rhp);
MoveToEx(hDc,MaxdLine.botx,MaxdLine.boty,NULL);
//在两端点之间画一条红线用来标识
LineTo(hDc,MaxdLine.topx,MaxdLine.topy);
DeleteObject(rhp);
ReleaseDC(hWnd,hDc);
//释放内存及资源
GlobalUnlock(hImgData);
GlobalUnlock(hDistAlpha);
GlobalFree(hDistAlpha);
GlobalUnlock(hMyLine);
GlobalFree(hMyLine);
return TRUE;
}
如果 ![]() 是给定的,用上述方法,我们可以找到该方向上最长的直线。
是给定的,用上述方法,我们可以找到该方向上最长的直线。
其实Hough变换能够查找任意的曲线,只要你给定它的方程。这里,我们就不详述了。
7.3 轮廓提取
轮廓提取的实例如图7.9、图7.10所示。
图7.9 原图 |
图7.10 轮廓提取 |


轮廓提取的算法非常简单,就是掏空内部点:如果原图中有一点为黑,且它的8个相邻点都是黑色时(此时该点是内部点),则将该点删除。要注意的是,我们处理的虽然是二值图,但实际上是256级灰度图,不过只用到了0和255两种颜色。源程序如下:
BOOL Outline(HWND hWnd)
{
DWORD OffBits,BufSize;
LPBITMAPINFOHEADER lpImgData;
LPSTR lpPtr;
HLOCAL hTempImgData;
LPBITMAPINFOHEADER lpTempImgData;
LPSTR lpTempPtr;
HDC hDc;
HFILE hf;
LONG x,y;
int num;
int nw,n,ne,w,e,sw,s,se;
//我们处理的实际上是256级灰度图,不过只用到了0和255两种颜色。
if( NumColors!=256){
MessageBox(hWnd,"Must be a mono bitmap with grayscale palette!",
"Error Message",MB_OK|MB_ICONEXCLAMATION);
return FALSE;
}
OffBits=bf.bfOffBits-sizeof(BITMAPFILEHEADER);
//BufSize为缓冲区大小
BufSize=OffBits+bi.biHeight*LineBytes;
//为新图缓冲区分配内存
if((hTempImgData=LocalAlloc(LHND,BufSize))==NULL)
{
MessageBox(hWnd,"Error alloc memory!","Error Message",MB_OK|
MB_ICONEXCLAMATION);
return FALSE;
}
lpImgData=(LPBITMAPINFOHEADER)GlobalLock(hImgData);
lpTempImgData=(LPBITMAPINFOHEADER)LocalLock(hTempImgData);
//拷贝头信息和位图数据
memcpy(lpTempImgData,lpImgData,BufSize);
for (y=1;y<bi.biHeight-1;y++){ //注意y的范围是从1到高度-2
//lpPtr指向原图数据,lpTempPtr指向新图数据
lpPtr=(char *)lpImgData+(BufSize-LineBytes-y*LineBytes);
lpTempPtr=(char *)lpTempImgData+(BufSize-LineBytes-y*LineBytes);
for (x=1;x<bi.biWidth-1;x++){
if(*(lpPtr+x)==0){ //是个黑点
//查找八个相邻点
nw=(unsigned char)*(lpPtr+x+LineBytes-1);
n=(unsigned char)*(lpPtr+x+LineBytes);
ne=(unsigned char)*(lpPtr+x+LineBytes+1);
w=(unsigned char)*(lpPtr+x-1);
e=(unsigned char)*(lpPtr+x+1);
sw=(unsigned char)*(lpPtr+x-LineBytes-1);
s=(unsigned char)*(lpPtr+x-LineBytes);
se=(unsigned char)*(lpPtr+x-LineBytes+1);
num=nw+n+ne+w+e+sw+s+se;
if(num==0) //说明都是黑点
*(lpTempPtr+x)=(unsigned char)255; //删除该黑点
}
}
}
if(hBitmap!=NULL)
DeleteObject(hBitmap);
hDc=GetDC(hWnd);
//创立一个新的位图
hBitmap=CreateDIBitmap(hDc,(LPBITMAPINFOHEADER)lpTempImgData,
(LONG)CBM_INIT,
(LPSTR)lpTempImgData+
sizeof(BITMAPINFOHEADER)+
NumColors*sizeof(RGBQUAD),
(LPBITMAPINFO)lpTempImgData,
DIB_RGB_COLORS);
hf=_lcreat("c://outline.bmp",0);
_lwrite(hf,(LPSTR)&bf,sizeof(BITMAPFILEHEADER));
_lwrite(hf,(LPSTR)lpTempImgData,BufSize);
_lclose(hf);
//释放内存和资源
ReleaseDC(hWnd,hDc);
LocalUnlock(hTempImgData);
LocalFree(hTempImgData);
GlobalUnlock(hImgData);
return TRUE;
}
7.4 种子填充
种子填充算法用来在封闭曲线形成的环中填充某中颜色,在这里我们只填充黑色。
种子填充其实上是图形学中的算法,其原理是:准备一个堆栈,先将要填充的点push进堆栈中;以后,每pop出一个点,将该点涂成黑色,然后按左上右下的顺序查看它的四个相邻点,若为白(表示还没有填充),则将该邻点push进栈。一直循环,直到堆栈为空。此时,区域内所有的点都被涂成了黑色。
这里,我们自己定义了一些堆栈的数据结构和操作,实现了堆栈的初始化、push、pop、判断是否为空、及析构。
//堆栈结构
typedef struct{
HGLOBAL hMem; //堆栈全局内存句柄
POINT *lpMyStack; //指向该句柄的指针
LONG ElementsNum; //堆栈的大小
LONG ptr; //指向栈顶的指针
}MYSTACK;
//初始化堆栈的操作,第二个参数指定堆栈的大小
BOOL InitStack(HWND hWnd,LONG StackLen)
{
SeedFillStack.ElementsNum=StackLen; //将堆栈的大小赋值
if((SeedFillStack.hMem=GlobalAlloc(GHND,SeedFillStack.ElementsNum*
sizeof(POINT)))==NULL)
{
//内存分配错误,返回FALSE;
MessageBox(hWnd,"Error alloc memory!","ErrorMessage",MB_OK|
MB_ICONEXCLAMATION);
return FALSE;
}
SeedFillStack.lpMyStack=(POINT *)GlobalLock(SeedFillStack.hMem);
//缓冲区全部清零
memset(SeedFillStack.lpMyStack,0,SeedFillStack.ElementsNum*
sizeof(POINT));
//堆顶指针为零
SeedFillStack.ptr=0;
//成功,返回TRUE
return TRUE;
}
//析构函数
void DeInitStack()
{
//释放内存,重置堆栈大小及栈顶指针。
GlobalUnlock(SeedFillStack.hMem);
GlobalFree(SeedFillStack.hMem);
SeedFillStack.ElementsNum=0;
SeedFillStack.ptr=0;
}
//push操作
BOOL MyPush(POINT p)
{
POINT *TempPtr;
if(SeedFillStack.ptr>=SeedFillStack.ElementsNum)
return FALSE; //栈已满,返回FALSE
//进栈,栈顶指针加1
TempPtr=(POINT *)(SeedFillStack.lpMyStack+SeedFillStack.ptr++);
(*TempPtr).x=p.x;
(*TempPtr).y=p.y;
return TRUE;
}
//pop操作
POINT MyPop()
{
POINT InvalidP;
InvalidP.x=-1;
InvalidP.y=-1;
if(SeedFillStack.ptr<=0)
return InvalidP; //栈为空,返回无效点
SeedFillStack.ptr--; //栈顶指针减1
//返回栈顶点
return *(SeedFillStack.lpMyStack+SeedFillStack.ptr);
}
//判断堆栈是否为空
BOOL IsStackEmpty()
{
return (SeedFillStack.ptr==0)?TRUE:FALSE;
}
如果读者对堆栈的概念还不清楚,请参阅有关数据结构方面的书籍,这里就不详述了。
要注意的是:(1)要填充的区域是封闭的;(2)我们处理的虽然是二值图,但实际上是256级灰度图,不过只用到了0和255两种颜色;(3)在菜单中选择种子填充命令时,提示用户用鼠标点取一个要填充区域中的点,处理是在WM_LBUTTONDOWN中。
MYSTACK SeedFillStack;
BOOL SeedFill(HWND hWnd)
{
DWORD OffBits,BufSize;
LPBITMAPINFOHEADER lpImgData;
HLOCAL hTempImgData;
LPBITMAPINFOHEADER lpTempImgData;
LPSTR lpTempPtr,lpTempPtr1;
HDC hDc;
HFILE hf;
POINT CurP,NeighborP;
//我们处理的实际上是256级灰度图,不过只用到了0和255两种颜色。
if( NumColors!=256){
MessageBox(hWnd,"Must be a mono bitmap with grayscale palette!",
"Error Message",MB_OK|MB_ICONEXCLAMATION);
return FALSE;
}
OffBits=bf.bfOffBits-sizeof(BITMAPFILEHEADER);
//BufSize为缓冲区大小
BufSize=OffBits+bi.biHeight*LineBytes;
//为新图缓冲区分配内存
if((hTempImgData=LocalAlloc(LHND,BufSize))==NULL)
{
MessageBox(hWnd,"Error alloc memory!","Error Message",MB_OK|
MB_ICONEXCLAMATION);
return FALSE;
}
lpImgData=(LPBITMAPINFOHEADER)GlobalLock(hImgData);
lpTempImgData=(LPBITMAPINFOHEADER)LocalLock(hTempImgData);
//拷贝头信息和位图数据
memcpy(lpTempImgData,lpImgData,BufSize);
if(!InitStack(hWnd,(LONG)bi.biHeight*bi.biWidth)){ //初始化堆栈
//若失败,释放内存,返回
LocalUnlock(hTempImgData);
LocalFree(hTempImgData);
GlobalUnlock(hImgData);
return FALSE;
}
lpTempPtr=(char*)lpTempImgData+
(BufSize-LineBytes-SeedPoint.y*LineBytes)+SeedPoint.x;
if(*lpTempPtr==0){
//鼠标点到了黑点上,提示用户不能选择边界上的点,返回FALSE
MessageBox(hWnd,"The point you select is a contour point!",
"Error Message",MB_OK|MB_ICONEXCLAMATION);
LocalUnlock(hTempImgData);
LocalFree(hTempImgData);
GlobalUnlock(hImgData);
DeInitStack();
return FALSE;
}
//push该点(用户用鼠标选择的,处理是在WM_LBUTTONDOWN中
MyPush(SeedPoint);
while(!IsStackEmpty()) //堆栈不空则一直处理
{
CurP=MyPop(); //pop栈顶的点
lpTempPtr=(char*)lpTempImgData+
(BufSize-LineBytes-CurP.y*LineBytes)+CurP.x;
//将该点涂黑
*lpTempPtr=(unsigned char)0;
//左邻点
if(CurP.x>0) //注意判断边界
{
NeighborP.x=CurP.x-1;
NeighborP.y=CurP.y;
lpTempPtr1=lpTempPtr-1;
if(*lpTempPtr1!=0) //如果为白,表示还没有填,进栈
MyPush(NeighborP);
}
//上邻点
if(CurP.y>0) //注意判断边界
{
NeighborP.x=CurP.x;
NeighborP.y=CurP.y-1;
lpTempPtr1=lpTempPtr+LineBytes;
if(*lpTempPtr1!=0) //如果为白,表示还没有填,进栈
MyPush(NeighborP);
}
//右邻点
if(CurP.x<bi.biWidth-1) //注意判断边界
{
NeighborP.x=CurP.x+1;
NeighborP.y=CurP.y;
lpTempPtr1=lpTempPtr+1;
if(*lpTempPtr1!=0) //如果为白,表示还没有填,进栈
MyPush(NeighborP);
}
//下邻点
if(CurP.y<bi.biHeight-1) //注意判断边界
{
NeighborP.x=CurP.x;
NeighborP.y=CurP.y+1;
lpTempPtr1=lpTempPtr-LineBytes;
if(*lpTempPtr1!=0) //如果为白,表示还没有填,进栈
MyPush(NeighborP);
}
}
//析构堆栈,释放内存
DeInitStack();
if(hBitmap!=NULL)
DeleteObject(hBitmap);
hDc=GetDC(hWnd);
//创建新的位图
hBitmap=CreateDIBitmap(hDc,(LPBITMAPINFOHEADER)lpTempImgData,
(LONG)CBM_INIT,
(LPSTR)lpTempImgData+
sizeof(BITMAPINFOHEADER)+
NumColors*sizeof(RGBQUAD),
(LPBITMAPINFO)lpTempImgData,
DIB_RGB_COLORS);
hf=_lcreat("c://seed.bmp",0);
_lwrite(hf,(LPSTR)&bf,sizeof(BITMAPFILEHEADER));
_lwrite(hf,(LPSTR)lpTempImgData,BufSize);
_lclose(hf);
//释放内存和资源
ReleaseDC(hWnd,hDc);
LocalUnlock(hTempImgData);
LocalFree(hTempImgData);
GlobalUnlock(hImgData);
return TRUE;
}
7.5 轮廓跟踪
轮廓跟踪,顾名思义就是通过顺序找出边缘点来跟踪出边界。图7.9经轮廓跟踪后得到的结果如图7.11所示。

图7.11 图7.9轮廓跟踪后的结果
一个简单二值图象闭合边界的轮廓跟踪算法很简单:首先按从上到下,从左到右的顺序搜索,找到的第一个黑点一定是最左上方的边界点,记为A。它的右,右下,下,左下四个邻点中至少有一个是边界点,记为B。从开始B找起,按右,右下,下,左下,左,左上,上,右上的顺序找相邻点中的边界点C。如果C就是A点,则表明已经转了一圈,程序结束;否则从C点继续找,直到找到A为止。判断是不是边界点很容易:如果它的上下左右四个邻居都是黑点则不是边界点,否则是边界点。源程序如下,其中函数IsContourP用来判断某点是不是边界点。
BOOL Contour(HWND hWnd)
{
DWORD OffBits,BufSize;
LPBITMAPINFOHEADER lpImgData;
LPSTR lpPtr;
HLOCAL hTempImgData;
LPBITMAPINFOHEADER lpTempImgData;
LPSTR lpTempPtr;
HDC hDc;
HFILE hf;
LONG x,y;
POINT StartP,CurP;
BOOL found;
int i;
int direct[8][2]={{1,0},{1,1},{0,1},{-1,1},{-1,0},{-1,-1},{0,-1},{1,-1}};
//我们处理的实际上是256级灰度图,不过只用到了0和255两种颜色。
if( NumColors!=256){
MessageBox(hWnd,"Must be a mono bitmap with grayscale palette!",
"Error Message",MB_OK|MB_ICONEXCLAMATION);
return FALSE;
}
//到位图数据的偏移值
OffBits=bf.bfOffBits-sizeof(BITMAPFILEHEADER);
//缓冲区大小
BufSize=OffBits+bi.biHeight*LineBytes;
//为新图缓冲区分配内存
if((hTempImgData=LocalAlloc(LHND,BufSize))==NULL)
{
MessageBox(hWnd,"Error alloc memory!","Error Message",
MB_OK|MB_ICONEXCLAMATION);
return FALSE;
}
lpImgData=(LPBITMAPINFOHEADER)GlobalLock(hImgData);
lpTempImgData=(LPBITMAPINFOHEADER)LocalLock(hTempImgData);
//新图缓冲区初始化为255
memset(lpTempImgData,(BYTE)255,BufSize);
//拷贝头信息
memcpy(lpTempImgData,lpImgData,OffBits);
//找到标志置为假
found=FALSE;
for (y=0;y<bi.biHeight && !found; y++){
lpPtr=(char *)lpImgData+(BufSize-LineBytes-y*LineBytes);
for (x=0;x<bi.biWidth && !found; x++)
if (*(lpPtr++) ==0) found=TRUE;
//找到了最左上的黑点,一定是个边界点
}
if(found){ //如果找到了,才做处理
//从循环退出时,x,y坐标都做了加1的操作。在这里把它们减1,得到
//起始点坐标StartP
StartP.x=x-1;
StartP.y=y-1;
lpTempPtr=(char*)lpTempImgData+
(BufSize-LineBytes-StartP.y*LineBytes)+StartP.x;
*lpTempPtr=(unsigned char)0; //起始点涂黑
//右邻点
CurP.x=StartP.x+1;
CurP.y=StartP.y;
lpPtr=(char *)lpImgData+(BufSize-LineBytes-CurP.y*LineBytes)+CurP.x;
if(*lpPtr!=0){ //若右邻点为白,则找右下邻点
CurP.x=StartP.x+1;
CurP.y=StartP.y+1;
lpPtr=(char*)lpImgData+
(BufSize-LineBytes-CurP.y*LineBytes)+CurP.x;
if(*lpPtr!=0){ //若仍为白,则找下邻点
CurP.x=StartP.x;
CurP.y=StartP.y+1;
}
else{ //若仍为白,则找左下邻点
CurP.x=StartP.x-1;
CurP.y=StartP.y+1;
}
}
while (! ( (CurP.x==StartP.x) &&(CurP.y==StartP.y))){ //知道找到起始点,
//循环才结束
lpTempPtr=(char*)lpTempImgData+
(BufSize-LineBytes-CurP.y*LineBytes)+CurP.x;
*lpTempPtr=(unsigned char)0;
for(i=0;i<8;i++){
//按右,右上,上,左上,左,左下,下,右下的顺序找相邻点
//direct[i]中存放的是该方向x,y的偏移值
x=CurP.x+direct[i][0];
y=CurP.y+direct[i][1];
//lpPtr指向原图数据,lpTempPtr指向新图数据
lpTempPtr=(char*)lpTempImgData+
(BufSize-LineBytes-y*LineBytes)+x;
lpPtr=(char *)lpImgData+(BufSize-LineBytes-y*LineBytes)+x;
if(((*lpPtr==0)&&(*lpTempPtr!=0))||
((x==StartP.x)&&(y==StartP.y)))
//原图中为黑点,且新图中为白点(表示还没搜索过)时才处理
//另一种可能是找到了起始点
if(IsContourP(x,y,lpPtr)){ //若是个边界点
//记住当前点的位置
CurP.x=x;
CurP.y=y;
break;
}
}
}
}
if(hBitmap!=NULL)
DeleteObject(hBitmap);
hDc=GetDC(hWnd);
//创立一个新的位图
hBitmap=CreateDIBitmap(hDc,(LPBITMAPINFOHEADER)lpTempImgData,
(LONG)CBM_INIT,
(LPSTR)lpTempImgData+
sizeof(BITMAPINFOHEADER)+
NumColors*sizeof(RGBQUAD),
(LPBITMAPINFO)lpTempImgData,
DIB_RGB_COLORS);
hf=_lcreat("c://contour.bmp",0);
_lwrite(hf,(LPSTR)&bf,sizeof(BITMAPFILEHEADER));
_lwrite(hf,(LPSTR)lpTempImgData,BufSize);
_lclose(hf);
//释放内存和资源
ReleaseDC(hWnd,hDc);
LocalUnlock(hTempImgData);
LocalFree(hTempImgData);
GlobalUnlock(hImgData);
return TRUE;
}
//判断某点是不是边界点,参数x,y 为该点坐标,lpPtr为指向原数据的指针
BOOL IsContourP(LONG x,LONG y, char *lpPtr)
{
int num,n,w,e,s;
n=(unsigned char)*(lpPtr+LineBytes); //上邻点
w=(unsigned char)*(lpPtr-1); //左邻点
e=(unsigned char)*(lpPtr+1); //右邻点
s=(unsigned char)*(lpPtr-LineBytes); //下邻点
num=n+w+e+s;
if(num==0) //全是黑点,说明是个内部点而不是边界点
return FALSE;
return TRUE;
}
相关文章:

JS Array 中 shift 和 pop 的妙用
在 JS Array 中支持两个方法,shift() 和 pop(),分别是指从一个数据中的最前面和最后面删除一个值,并返删除值。看一个示例就明白了: var arr [s,o,f,i,s,h]; arr.shift(); // 返回 s arr; // 目前是 [o,f,i,s,h…

当今主流分割网络有哪些?12篇文章一次带你看完
作者 | 孙叔桥来源 | 转载自有三AI(ID: yanyousan_ai)本文的12篇文章总结了当前主流的分割网络及其结构,涵盖从编解码结构到解码器设计;从感受野到多尺度融合;从CNN到RNN与CRF;从2D分割到3D分割;…
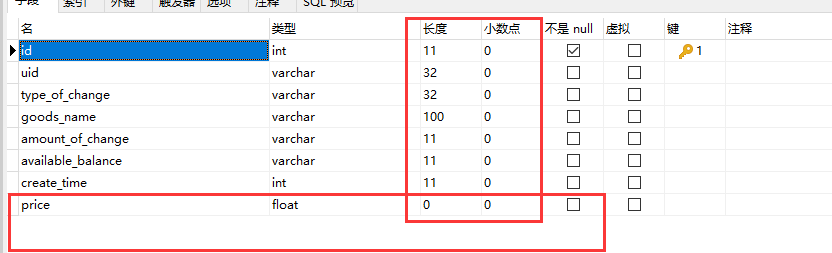
正确生成浮点型的方法,解决sqlachemy Float浮点型的坑,生成float类型时,长度和精度均为0,导致查询不到结果!...
问题描述 在使用flask_sqlachemy时,给price字段选择了Float类型,数据库用的mysql,生成数据库表后,发现 from sqlalchemy import Float,Column price Column(Float,default0.00) 虽然能存储float类型,结果如下 但是查询…
图像轮廓的提取和绘制
转自:http://blog.csdn.net/gnuhpc/archive/2009/06/18/4278105.aspx <>var ultimaFecha ; <>document.write(ultimaFecha); #include "highgui.h" #include "cv.h" #include <iostream> #include <iomanip> using …
上海交大张拳石:神经网络的可解释性,从经验主义到数学建模
作者 | 张拳石来源 | 转载自知乎Qs.Zhang张拳石本来想把题目取为“从炼丹到化学”,但是这样的题目太言过其实,远不是近期可以做到的,学术研究需要严谨。但是,寻找适当的数学工具去建模深度神经网络表达能力和训练能力,…

计算机网络模型到底是七层?五层?四层?
1.Introduction 本篇文章的初衷是在做Android网络开发时经常接触各种协议,比如HTTP、XMPP、HLS、RTSP、TCP等协议,对网络的模型和层次有个直观的了解可以做到心中有数。OSI参考模型是七层,TCP/IP模型是四层,计算机网络(…
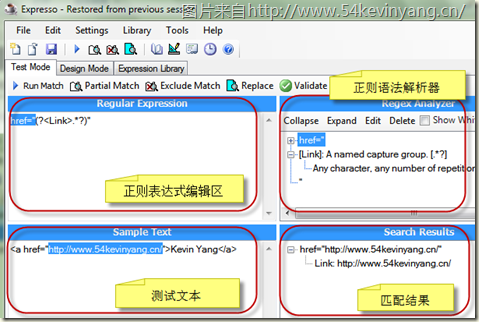
【推荐】使用Ultrapico Expresso学习正则表达式
推荐理由Ultrapico Expresso是我工作中经常使用的一个非常强大的正则表达式构建、测试以及代码生成工具。它能够对你构建的正则表达式进行解析、验证,并输出解析结果,提供性能测试工具,支持C#、VB等代码生成,最重要的是࿰…

OpenCV中常用到的轮廓处理函数汇总
转自:http://fsa.ia.ac.cn/opencv-doc-cn/opencv-doc-cn-0.9.7/ref/opencvref_cv.cn.htm ApproxChains 用多边形曲线逼近 Freeman 链 CvSeq* cvApproxChains( CvSeq* src_seq, CvMemStorage* storage,int methodCV_CHAIN_APPROX_SIMPLE,double parameter0, int mi…
《Linux内核原理与分析》第二周作业
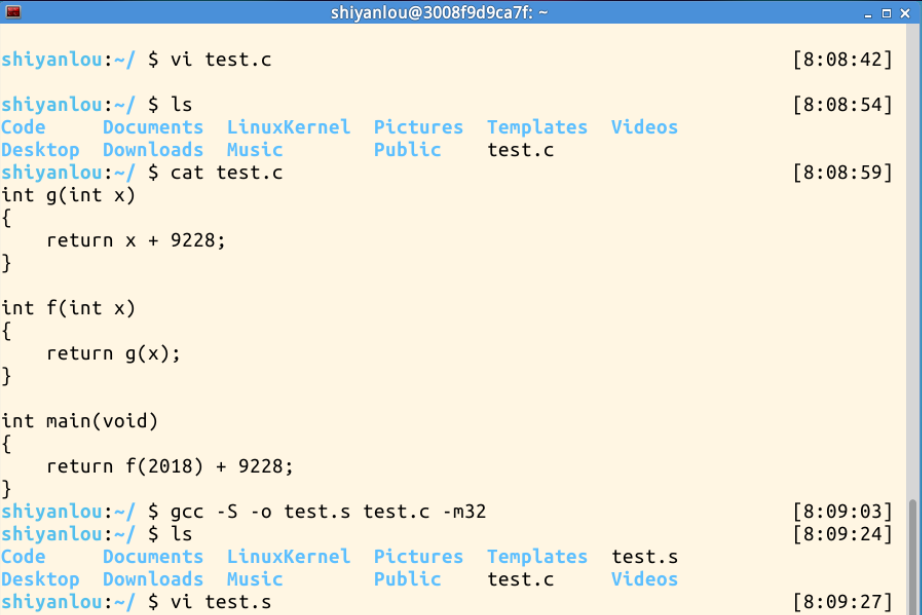
反汇编一个简单的C程序 1、实验要求 使用: gcc –S –o test.s test.c -m32 命令编译成汇编代码,对汇编代码进行分析总结。其中test.c的具体内容如下: int g(int x) {return x 3; }int f(int x) {return g(x); }int main(void) {return f(8)…
首次!腾讯全面公开整体开源路线图
6月25日,由Cloud Native Computing Foundation (CNCF) 主办的云原生技术大会在上海举办,腾讯开源联盟主席、腾讯开源管理办公室委员、Apache Member堵俊平首次公开了腾讯整体的开源战略路线图。 堵俊平表示:“腾讯开源提倡‘开放、共享、合力…
201771010111李瑞红《面向对象的程序设计》第八周实验总结
实验八接口的定义与使用 实验时间 2018-10 理论部分 6.1 接口:用interface声明,是抽象方法和常量值定义的集 合。从本质上讲,接口是一种特殊的抽象类。 在Java程序设计语言中,接口不是类,而是对类 的一组需求描述,由常…

崛起的Python,真的影响了76万人?
随着AI的兴起,Python彻底火了。据Stack Overflow调研报告:Python的月活用户已超越了Java、成为第一,全民Python已为“大势所趋”。那么,程序员有必要学Python吗?如何高效掌握Python?程序员为啥要学Python&a…
OpenCV查找轮廓
转自:http://westice.javaeye.com/blog/721225 主要函数是 cvFindContours(tour_buf,storage,&contour,sizeof(CvContour), CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE); tour_buf 是需要查找轮廓…
非阻塞socket的连接
引用自:http://blog.csdn.net/cccallen/article/details/6619994 连接套接字,阻塞的套接字超时时间很长无法接受,而是用非阻塞套接字时使用的方案也有多种。后者是个比较好的方法 方案1:不断重试,直到连接上或者超时&a…
OpenCV下车牌定位算法实现代码
转自:http://blog.csdn.net/heihei723/archive/2006/05/14/728046.aspx#FeedBack 车牌定位算法在车牌识别技术中占有很重要地位,一个车牌识别系统的识别率往往取决于车牌定位的成功率及准确度。 车牌定位有很多种算法,从最简单的来࿰…
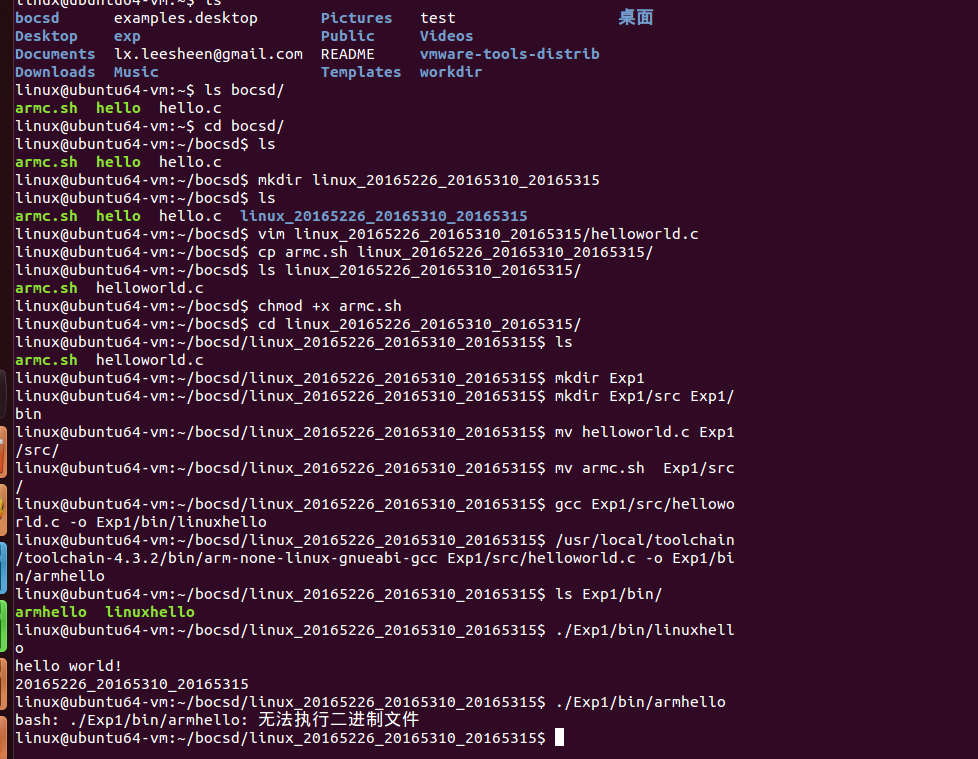
2018-2019-1 20165310 20165315 20165226 实验一 开发环境的熟悉
2018-2019-1 20165226 20165310 20165315 实验一 开发环境的熟悉 目录 一、实验目的 二、实验步骤 三、实验过程中遇到的问题及解决 四、实验感想 一、实验目的 熟悉Linux开发环境并学会Linux开发环境的配置和使用,熟悉arm箱的使用,熟悉以下知识点&#…

上海居民被垃圾分类逼疯!这款垃圾自动分类器也许能帮上忙
作者 | 视说君来源 | 授权转载自视说AI(ID:techtalkai)让垃圾自动分类近期垃圾分类成为了一个热门话题,原来直接一次性扔掉的垃圾,现在都需要分门别类进行投放。从今年7月1日起,新的《上海市生活垃圾管理条例》正式开始…

虽被BERT碾压,但还是有必要谈谈BERT时代与后时代的NLP
作者 | 吴金龙,爱因互动技术合伙人,算法负责人来源 | 授权转载自AINLP(ID:nlpjob)2018年是NLP的收获大年,模型预训练技术终于被批量成功应用于多项NLP任务。之前搞NLP的人一直羡慕搞CV的人,在ImageNet上训练…
C++ 简单读写文本文件、统计文件的行数、读取文件数据到数组
转自:http://hi.baidu.com/ctralt/blog/item/cde79fec87f841302697911c.html fstream提供了三个类,用来实现c对文件的操作。(文件的创建、读、写)。ifstream -- 从已有的文件读 ofstream -- 向文件写内容 fstream - 打开文件供读写…

Exchange 2007迁移2010时的公用文件夹多个公用树错误
近期在项目中,客户Exchange 从2007迁移到2010,Microsoft Exchange从2007开始就逐渐弱化了公用文件夹,outlook 2007和2010都不需要使用到公用文件夹了。但客户现状存在90%的outlook 2003客户端,因此需要使用到公用文件夹。在Exchan…
约瑟夫环问题的两种解法(详解)
约瑟夫环问题的两种解法(详解) 题目: Josephus有过的故事:39 个犹太人与Josephus及他的朋友躲到一个洞中,39个犹太人决定宁愿死也不要被敌人抓。于是决定了自杀方式,41个人排成一个圆圈,由第1个…
Linux下多播的配置【十全十美】
单播地址标识单个IP接口,广播地址标识某个子网的所有IP接口。多播地址表示某一组IP接口,单播和广播是寻址方案中的两个极端(要么单个要么全部),多播则意在两者之间提供一种折中方案。多播是用于建立分布式系统的重要工具,例如&…
CvSeq相关函数
转自:http://hi.baidu.com/pengjun/blog/item/a72fc8ea030e79d4d439c906.html 函数原型说明CvSeq* cvCreateSeq(int seq_flags,int header_size,int elem_size,CvMemStorage* storage)功能:创建一序列 参数:seq_flags为序列的符号标志。如果序…

10月份机房技术指标
下载syslinux,dhcp,http,tftp-serveryum -y install syslinux dhcp httpd tftp-serveryum -y install system-config-kickstart挂载sr0是镜像用system-config-kickstart工具来生成一个自动的安装的配置文件ip填自己的ip地址。目录填挂载光盘的…

5G时代,微软又走对了一步棋!
2019年4月,CSDN采访微软(中国)首席技术官韦青,期间谈到5G。他认为,5G绝对是一个划时代的革命性突破,但是这个突破不止于现在所说的“5G”通讯技术,它为未来以“万物互联”为基础的智能社会开创了…

6426C Lab3 部署证书和管理注册
共有4个练习:练习1:配置证书模板练习2:配置自动注册练习3:管理证书 Revocation练习4:配置Key Recovery练习1:任务1:复制、安装和手动注册一个证书1. 转到HQDC1.contoso.com服务器,添…
CreateStructuringElementEx
转自:http://baike.baidu.com/view/4819443.htm CreateStructuringElementEx 创建结构元素 IplConvKernel* cvCreateStructuringElementEx( int cols, int rows, int anchor_x, int anchor_y, int shape, int* valuesNULL ); cols 结构元素的列数目 rows 结构…
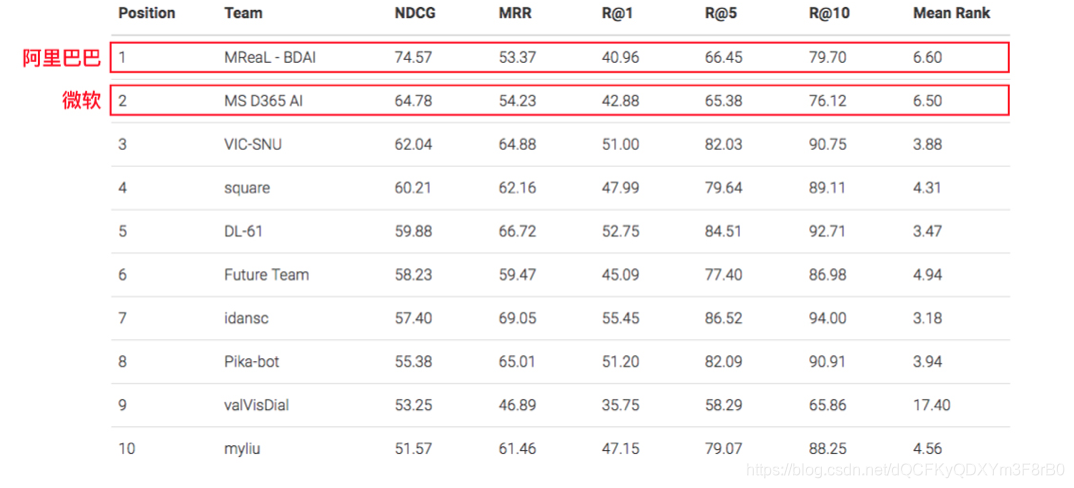
阿里AI再摘一冠,大幅提高视觉对话世界纪录
近日, 在第二届视觉对话挑战赛Visual Dialogue Challenge中,阿里AI击败了微软、首尔大学等十支参赛队伍,获得冠军。 (阿里AI在视觉对话竞赛中得冠)视觉对话竞赛由美国佐治亚理工大学、Facebook人工智能实验室ÿ…

OSChina 周一乱弹 —— 嫂子我帮你们照顾放心吧
2019独角兽企业重金招聘Python工程师标准>>> Osc乱弹歌单(2018)请戳(这里) 【今日歌曲】 clouddyy :#每日一歌# 《绿光 - 孙燕姿》 《绿光》 - 孙燕姿 手机党少年们想听歌,请使劲儿戳࿰…
十一月工作小记--上线前的冲刺
加班不是目的,重要的是找到加班的意义。尽管程序猿们有很多个不愿意,他们却依然要面对加班的现实。加班就是程序猿们生活中的一张牌,既然不能决定这张牌是什么,那就想想如何去打好这张牌吧。本月,我们的生活依然是那么…