直播回顾 | 关于Apollo 5.0控制在环仿真技术的分享


 ▲模拟概述
▲模拟概述
 ▲Control-in-the-loopSimulation架构
▲Control-in-the-loopSimulation架构
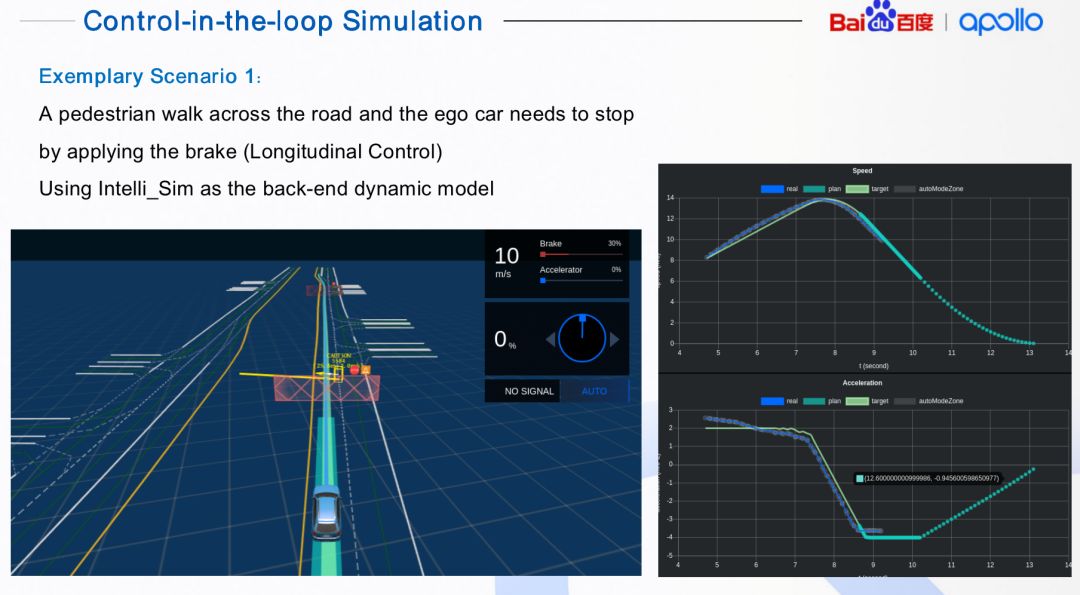 ▲Control-in-the-loopSimulation典型场景
▲Control-in-the-loopSimulation典型场景
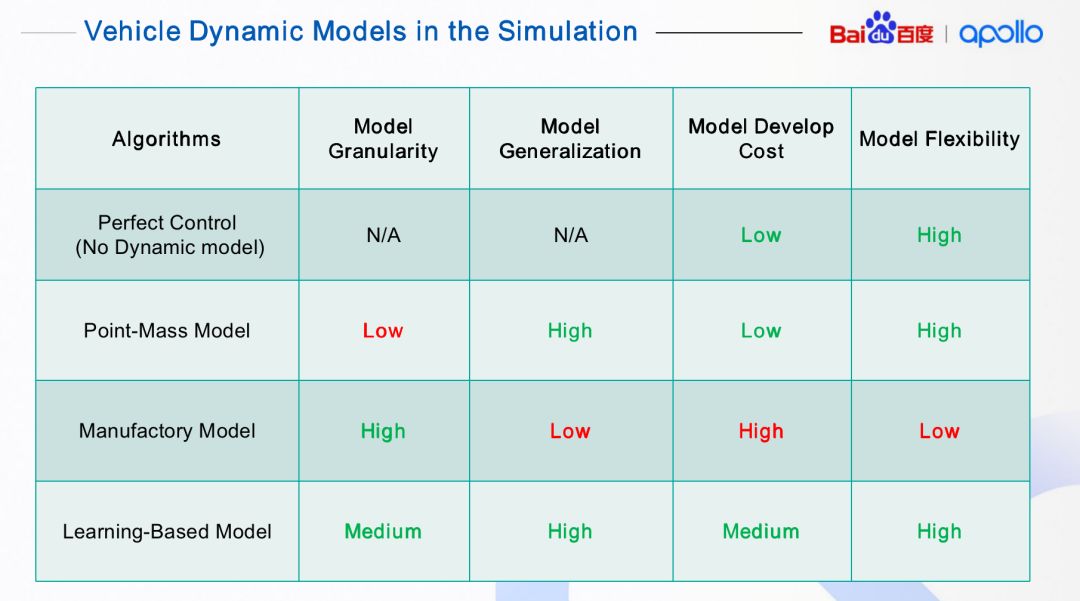 ▲车辆动力学模型仿真对比
▲车辆动力学模型仿真对比 ▲车辆动力学模型仿真网页
▲车辆动力学模型仿真网页
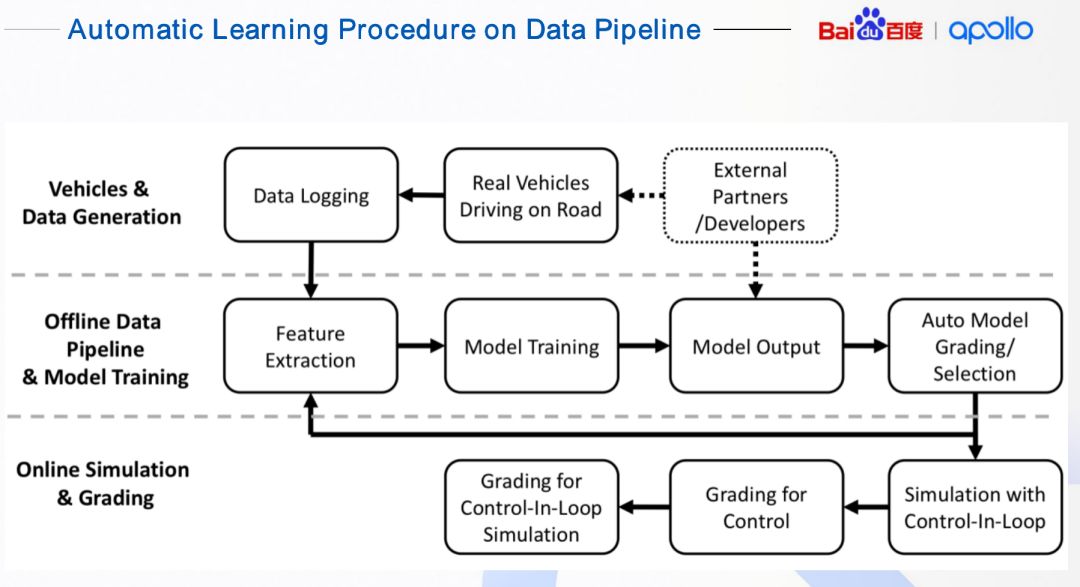 ▲数据管道自动学习程序图
▲数据管道自动学习程序图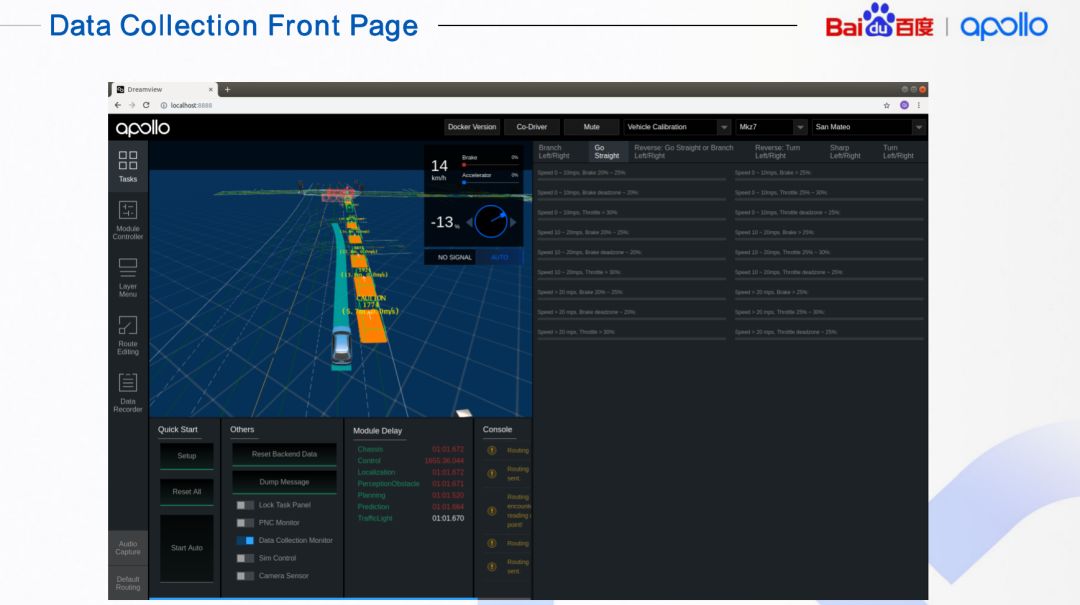 ▲数据收集
▲数据收集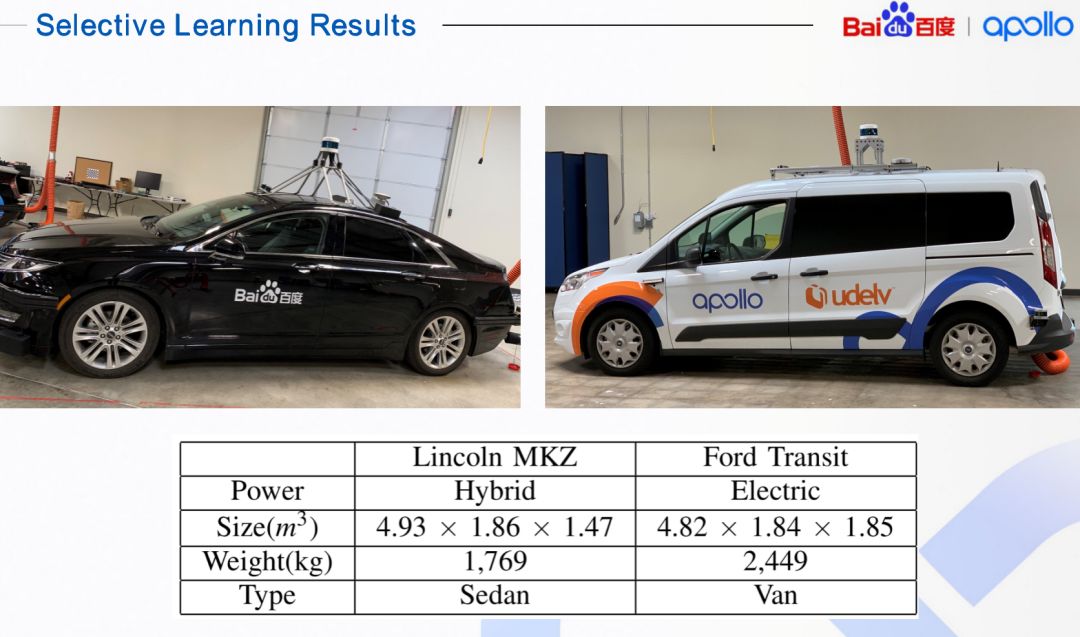
▲有选择性的学习结果
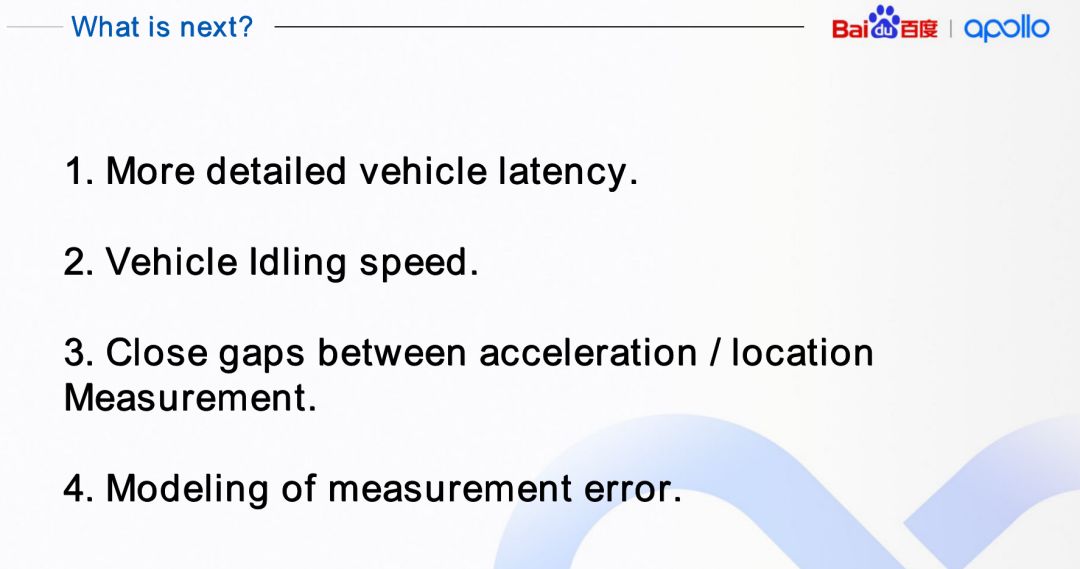 ▲Apollo控制在环仿真技术出现的问题
▲Apollo控制在环仿真技术出现的问题
 ▲详情参考论文
▲详情参考论文以上就是关于本次分享的全部内容。欢迎大家提出问题,关注【Apollo开发者社区】微信公众号,进入开发者社群进行交流。更多相关技术干货也可以继续关注后续的社区课程分享。
点击文章左下角『阅读原文』可看直播视频回放
相关文章:

eclipes 安装 pytdev,svn,插件
1, python pydevhttp://pydev.org/updates2, svnhttp://subclipse.tigris.org/update3, 推荐http://subclipse.tigris.org/update_1.10.x 转载于:https://blog.51cto.com/swq499809608/1240873
FFmpeg简介及在vc2010下编译步骤
FFmpeg是一个开源的多媒体库,最新版本是2.4.3,它的License是LGPL或GPL。FFmpeg可以用来记录、转换数字音频、视频,并能将其转换为流的开源计算机程序。它包括了音/视频编码库libavcodec。FFmpeg是在Linux下开发出来的,但它可以在包…
医院六级电子病历建设思路及要点
产生背景 在医院电子病历信息化发展的过程中,先后经历了纸质病历、电子病历、结构化电子病历以及具有全医疗过程管理能力的电子病历四个阶段。临床业务需求质量的逐步提升,标准规范的逐步细化,互联网战略的落地实施,无疑对目前电子…

上手必备!不可错过的TensorFlow、PyTorch和Keras样例资源
作者 | 黄海广来源 | 机器学习初学者(ID: ai-start-com)TensorFlow、Keras和PyTorch是目前深度学习的主要框架,也是入门深度学习必须掌握的三大框架,但是官方文档相对内容较多,初学者往往无从下手。本人从github里搜到…
Linux下gdb调试工具的使用
gdb是GNU开源组织发布的一个强大的Linux下的程序调试工具。 gdb主要完成四个方面的功能:(1)、启动你的程序,可以按照你的自定义的要求随心所欲的运行程序;(2)、可让被调试的程序在你所指定的调试的断点处停住(断点可以是条件表达式)…
UESTC 1726 整数划分(母函数)
题目链接:http://222.197.181.5/problem.php?pid1726 题意:求n的划分数。一种划分方案中不能有相同的数字。 思路:(1x)(1x^2)(1x^3)……(1x^1000). int f[N];void init() {f[1]1;int a[N]{0};a[0]1; a[1]1;int i,j;for(i2;i<1000;i){for(…
JS nodeType返回类型
JS nodeType返回类型 前几天朋友正好问道 这个 js的nodeType是个什么概念(做浏览器底层的)正好遇到这篇文章可以向大家解释下 将HTML DOM中几个容易常用的属性做下记录: nodeName、nodeValue 以及 nodeType 包含有关于节点的信息。 nodeName …
C# 获取指定目录下所有文件信息、移动目录、拷贝目录
/// <summary>/// 返回指定目录下的所有文件信息/// </summary>/// <param name"strDirectory"></param>/// <returns></returns>public List<FileInfo> GetAllFilesInDirectory(string strDirectory){List<FileInfo&g…
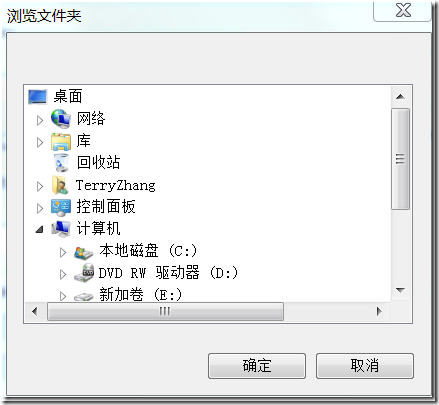
文件夹浏览(SHBrowseForFolder)
from http://www.cnblogs.com/Clingingboy/archive/2011/04/16/2018284.html 一.首先要为SHBrowseForFolder准备一个结构体BROWSEINFO typedef struct _browseinfoW {HWND hwndOwner;PCIDLIST_ABSOLUTE pidlRoot;LPWSTR pszDisplayName; // Return display…
技术新贵:RPA与NLP技术的结合与应用
什么是 RPA(Robotic Process Automation)?机器人流程自动化(RPA)是一种自动化工具,用于创建软件机器人的虚拟劳动力,从而优化和降低企业中端到端业务流程的成本。RPA 可以翻译成机器人流程自动化…
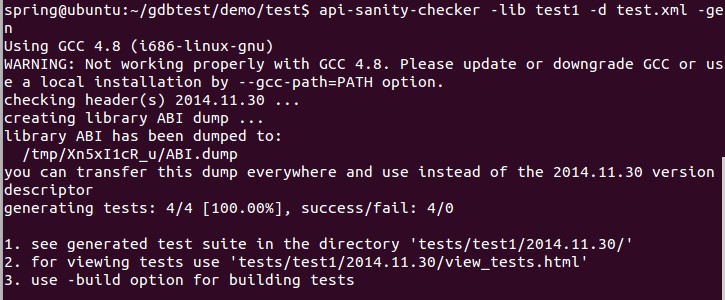
API Sanity Checker在Ubuntu中的使用
API Sanity Checker是一个自动生成单元测试用例的工具,可用于链接测试。它可用于三大桌面平台,下面简单介绍它在Linux下的使用步骤:1. 从http://ispras.linuxbase.org/index.php/API_Sanity_Autotest 下载最新的api-sanity-checker-1.98…

手动脱壳—dump与重建输入表(转)
文章中用到的demo下载地址: http://download.csdn.net/detail/ccnyou/4540254 附件中包含demo以及文章word原稿 用到工具: Ollydbg LordPE ImportREC 这些工具请自行下载准备 Dump原理这里也不多做描述,想要了解google it!常见的dump软件有Lo…
如何用RNN生成莎士比亚风格的句子?(文末赠书)
作者 | 李理,环信人工智能研发中心vp,十多年自然语言处理和人工智能研发经验。主持研发过多款智能硬件的问答和对话系统,负责环信中文语义分析开放平台和环信智能机器人的设计与研发。来源 | 《深度学习理论与实战:基础篇》基本概…
图像相似度计算之哈希值方法OpenCV实现
感知哈希算法(perceptual hash algorithm),它的作用是对每张图像生成一个“指纹”(fingerprint)字符串,然后比较不同图像的指纹。结果越接近,就说明图像越相似。 实现步骤: 1. 缩小尺寸:将图像缩小到8*8的尺寸&am…
七夕大礼包:26个AI学习资源送给你!
整理 | Jane出品 | AI科技大本营(ID:rgznai100)免费的在线学习课程一直是大多数人学习 AI 知识和技能的方式之一。今天,基于 Github 上一位小姐姐 Chip Huyen 分享的 10 门机器学习课程,AI科技大本营将这份收藏大礼包进…

HTML Inspector – 帮助你编写高质量的 HTML 代码
HTML Inspector 是一款代码质量检测工具,帮助你编写更优秀的 HTML 代码。HTML Inspector 使用 JavaScript 编写,运行在浏览器中,是最好的 HTML 代码检测工具。 您可能感兴趣的相关文章Metronic – 赞!Bootstrap 响应式后台管理模板…
Git简介以及与SVN的区别
Git是由著名Linux内核(Kernel)开发者Linus Torvalds为了便利维护Linux而开发的。 Git是一个分布式的版本控制系统。作为一个分布式的版本控制系统,在Git中并不存在主库这样的概念,每一份复制出的库都可以独立使用,任何两个库之间的不一致之处…
java集合中某一个元素出现的次数
int count Collections.frequency(list, key); java的内置方法转载于:https://www.cnblogs.com/wysAC666/p/10252676.html

加密解密-DES算法和RSA算法
昨天忽然对加密解密有了兴趣,今天上班查找了一些资料,现在就整理一下吧:) 一.DES算法 这种算法如图所示,这里将描述它的每一个步骤。这个算法进行了16次迭代(圈),把各块明文交织起来…
开始Dojo之路
开始Dojo之路waiting……转载于:https://blog.51cto.com/frabbit2013/1242108
图像相似度计算之直方图方法OpenCV实现
操作步骤: 1. 载入图像(灰度图或者彩色图),并使其大小一致; 2. 若为彩色图,增进行颜色空间变换,从RGB转换到HSV,若为灰度图则无需变换; 3. 若为灰度图,直接计算其直方…

黄皓之后,计算机科学上帝Don Knuth仅用一页纸证明布尔函数敏感度猜想
作者 | Freesia编辑 | 夕颜出品 | AI科技大本营(ID:rgznai100)导读:近日,美国艾默里大学计算机与数学科学系教授黄皓(Hao Huang)用一篇短短 6 页的论文证明了布尔函数,引发了计算机和数学领域社…

数位DP 不断学习中。。。。
1, HDU 2089 不要62 :http://acm.hdu.edu.cn/showproblem.php?pid2089 题意:不能出现4,或者相邻的62, dp[i][0],表示不存在不吉利数字 dp[i][1],表示不存在不吉利数字,且最高位为2 dp[i][2],表示存在不吉利数字 #i…
linux 性能 管理 与 优化
一、影响Linux服务器性能的因素操作系统级:CPU、内存、磁盘I/O带宽、网络I/O带宽程序应用级二、系统性能评估影响性能因素 评判标准 好 坏 糟糕 CPU user% sys%< 70% user% sys% 85% user% sys% >90% 内存 Swap In(si&…
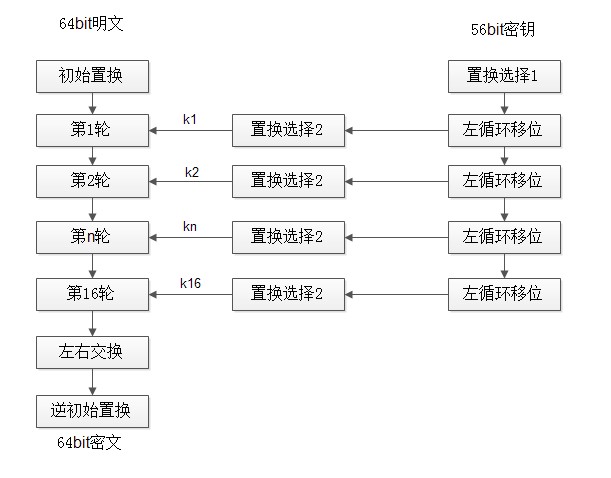
对称加密算法之DES介绍
DES(Data Encryption Standard)是分组对称密码算法。DES采用了64位的分组长度和56位的密钥长度,它将64位的输入经过一系列变换得到64位的输出。解密则使用了相同的步骤和相同的密钥。DES的密钥长度为64位,由于第n*8(n1,2,…8)是校验位,因此实…
200行代码解读TDEngine背后的定时器
作者 | beyondma来源 | CSDN博客导读:最近几周,本文作者几篇有关陶建辉老师最新的创业项目-TdEngine代码解读文章出人意料地引起了巨大的反响,原以为C语言已经是昨日黄花,不过从读者的留言来看,C语言还是老当益壮&…

fastJson结合Nutz.Mapl的进阶应用
为什么80%的码农都做不了架构师?>>> 今天要做一堆数据的序列化, 反序列化, 序列化没问题, 反序列化却遇到了点小意外, 这一堆数据不是一个类!!!!!!当然可以通过类内部的一个类型对象来判断, 但是fastJson并没有这个功能, 只能自己一个一个的遍历一个一个…
OpenCV实现遍历文件夹下所有文件
OpenCV中有实现遍历文件夹下所有文件的类Directory,它里面包括3个成员函数:(1)、GetListFiles:遍历指定文件夹下的所有文件,不包括指定文件夹内的文件夹;(2)、GetListFolders:遍历指定文件夹下的所有文件夹…
阿里、京东、快手、华为......他们是如何构建一个个推荐系统“帝国”的?
推荐系统在人们的日常生活中随处可见,成为我们生命中不可或缺的一部分。作为当今应用最为广泛和成熟的 AI 技术之一,它是信息生产者、传播者与用户之间的桥梁,可以让信息最精准、最高效地到达需求不一的用户面前。每天打开手机或电脑端的大部…
前端基础_ES6
声明 三大关键字声明变量:var (ES5语法) let (ES6语法)声明常量:const (ES6语法) var 声明变量特性1、支持 函数作用域2、支持 JS预解析 (所谓变量提升)3、支持 重复声明 ÿ…