深度学习中的优化简介
深度学习算法在许多情况下都涉及到优化。
1. 学习和纯优化有什么不同
在大多数机器学习问题中,我们关注某些性能度量P,其定义于测试集上并且可能是不可解的。因此,我们只是间接地优化P。我们系统通过降低代价函数J(θ)来提高P。这一点与纯优化不同,纯优化最小化目标J本身。训练深度模型的优化算法通常也会包括一些针对机器学习目标函数的特定结构进行的特化。通常,代价函数可写为训练集上的平均。
经验风险(empirical risk)最小化:机器学习算法的目标是降低J’(θ)的期望泛化误差。这个数据量被称为风险(risk)。将机器学习问题转化回一个优化问题的最简单方法是最小化训练集上的期望损失。这意味着用训练集上的经验分布p’(x,y)替代真实分布p(x,y)。现在,我们将最小化经验风险:

其中m表示训练样本的数目。基于最小化这种平均训练误差的训练过程被称为经验风险最小化(empirical risk minimization)。经验风险最小化很容易导致过拟合。最有效的现代优化算法是基于梯度下降的。在深度学习中我们很少使用经验风险最小化。
代理损失函数和提前终止:有时,我们真正关心的损失函数(比如分类误差)并不能被高效地优化。例如,即使对于线性分类器而言,精确地最小化0----1损失通常是不可解的(复杂度是输入维数的指数级别)。在这种情况下,我们通常会优化代理损失函数(surrogateloss function)。代理损失函数作为原目标的代理,还具备一些优点。例如,正确类别的负对数似然通常用作0----1损失的替代。负对数似然允许模型估计给定样本的类别的条件概率,如果该模型效果好,那么它能够输出期望最小分类误差所对应的类别。
在某些情况下,代理损失函数比原函数学到的更多。例如,使用对数似然替代函数时,在训练集上的0----1损失达到0之后,测试集上的0----1损失还能持续下降很长一段时间。这是因为即使0----1损失期望是零时,我们还能拉开不同类别的距离以改进分类器的鲁棒性,获得一个更强壮的、更值得信赖的分类器,从而,相对于简单地最小化训练集上的平均0----1损失,它能够从训练数据中抽取更多信息。
一般的优化和我们用于训练算法的优化有一个重要不同:训练算法通常不会停止在局部极小点。反之,机器学习通常优化代理损失函数,但是在基于提前终止的收敛条件满足时停止。通常,提前终止使用真实潜在损失函数,如验证集上的0----1损失,并设计为在过拟合发生之前终止。与纯优化不同的是,提前终止时代理损失函数仍然有较大的导数,而纯优化终止时导数较小。
批量算法和小批量算法:机器学习算法和一般优化算法不同的一点是,机器学习算法的目标函数通常可以分解为训练样本上的求和。机器学习中的优化算法在计算参数的每一次更新时通常仅使用整个代价函数中一部分项来估计代价函数的期望值。
优化算法用到的目标函数J中的大多数属性也是训练集上的期望。例如,最常用的属性是梯度。准确计算这个期望的计算代价非常大,因为我们需要在整个数据集上的每个样本上评估模型。在实践中,我们可以从数据集中随机采样少量的样本,然后计算这些样本上的平均值。
另一个促使我们从小数目样本中获得梯度的统计估计的动机是训练集的冗余。我们可能会发现大量样本都对梯度做出了非常相似的贡献。
使用整个训练集的优化算法被称为批量(batch)或确定性(deterministic)梯度算法,因为它们会在一个大批量中同时处理所有样本。通常,术语”批量梯度下降”指使用全部训练集,而术语”批量”单独出现时指一组样本。例如,我们普遍使用术语”批量大小”表示小批量的大小。每次只使用单个样本的优化算法有时被称为随机(stochastic)或者在线(on-line)算法。术语”在线”通常是指从连续产生样本的数据流中抽取样本的情况,而不是从一个固定大小的训练集中遍历多次采样的情况。大多数用于深度学习的算法介于以上两者之间,使用一个以上,而又不是全部的训练样本。传统上,这些会被称为小批量(minibatch)或小批量随机(minibatch stochastic)方法,现在通常将它们简单地称为随机(stochastic)方法。随机方法的典型示例是随机梯度下降。
小批量的大小通常由以下几个因素决定:
(1)、更大的批量会计算更精确的梯度估计,但是回报却是小于线性的。
(2)、极小批量通常难以充分利用多核架构。这促使我们使用一些绝对最小批量,低于这个值的小批量处理不会减少计算时间。
(3)、如果批量处理中的所有样本可以并行地处理(通常确是如此),那么内存消耗和批量大小会正比。对于很多硬件设施,这是批量大小的限制因素。
(4)、在某些硬件上使用特定大小的数组时,运行时间会更少。尤其是在使用GPU时,通常使用2的幂数作为批量大小可以获得更少的运行时间。一般,2的幂数的取值范围是32到256,16有时在尝试大模型时使用。
(5)、可能是由于小批量在学习过程中加入了噪声,它们会有一些正则化效果。泛化误差通常在批量大小为1时最好。因为梯度估计的高方差,小批量训练需要较小的学习率以保持稳定性。因为降低的学习率和消耗更多步骤来遍历整个训练集都会产生更多的步骤,所以会导致总的运行时间非常大。
不同的算法使用不同的方法从小批量中获取不同的信息。有些算法对采样误差比其它算法更敏感,这通常有两个可能原因:一个是它们使用了很难在少量样本上精确估计的信息,另一个是它们以放大采样误差的方式使用了信息。
小批量是随机抽取的这点也很重要。从一组样本中计算出梯度期望的无偏估计要求这些样本是独立的。我们也希望两个连续的梯度估计是互相独立的,因此两个连续的小批量样本也应该是彼此独立的。很多现实的数据集自然排列,从而使得连续的样本之间具有高度相关性。例如,假设我们有一个很长的血液样本测试结果清单。清单上的数据有可能是这样获取的,头五个血液样本于不同时间段取自第一个病人,接下来三个血液样本取自第二个病人,再随后的血液样本取自第三个病人,等等。如果我们从这个清单上顺序抽取样本,那么我们的每个小批量数据的偏差都很大,因为这个小批量很可能只代表着数据集上众多患者中的某一个患者。在这种数据集中的顺序有很大影响的情况下,很有必要在抽取小批量样本前打乱样本顺序。对于非常大的数据集,如数据中心含有几十亿样本的数据集,我们每次构建小批量样本时都将样本完全均匀地抽取出来是不太现实的。幸运的是,实践中通常将样本顺序打乱一次,然后按照这个顺序存储起来就足够了。之后训练模型时会用到的一组组小批量连续样本是固定的,每个独立的模型每次遍历训练数据时都会重复使用这个顺序。然而,这种偏离真实随机采样的方法并没有很严重的有害影响。不以某种方式打乱样本顺序才会极大地降低算法的性能。
很多机器学习上的优化问题都可以分解成并行地计算不同样本上单独的更新。换言之,我们在计算小批量样本X上最小化J(X)的更新时,同时可以计算其它小批量样本上的更新。
小批量随机梯度下降的一个有趣动机是,只要没有重复使用样本,它将遵循着真实泛化误差的梯度。很多小批量随机梯度下降方法的实现都会打乱数据顺序一次,然后多次遍历数据来更新参数。第一次遍历时,每个小批量样本都用来计算真实泛化误差的无偏估计。第二次遍历时,估计将会是有偏的,因为它重新抽取了已经用过的样本,而不是从和原先样本相同的数据生成分布中获取新的无偏的样本。
2. 神经网络优化中的挑战
病态:在优化凸函数时,会遇到一些挑战。这其中最突出的是Hessian矩阵H的病态。这是数值优化、凸优化或其它形式的优化中普遍存在的问题。病态问题一般被认为存在于神经网络训练过程中。病态体现在随机梯度下降会”卡”在某些情况,此时即使很小的更新步长也会增加代价函数。
局部极小值:凸优化问题的一个突出特点是其可以简化为寻找一个局部极小点的问题。任何一个局部极小点都是全局最小点。有些凸函数的底部是一个平坦的区域,而不是单一的全局最小点,但该平坦区域中的任意点都是一个可以接受的解。优化一个凸问题时,若发现了任何形式的临界点,我们都会知道已经找到了一个不错的可行解。对于非凸函数时,如神经网络,有可能会存在多个局部极小值。事实上,几乎所有的深度模型基本上都会有非常多的局部极小值。然而,我们会发现这并不是主要问题。由于模型可辨识性(model identifiability)问题,神经网络和任意具有多个等效参数化潜变量的模型都会具有多个局部极小值。如果一个足够大的训练集可以唯一确定一组模型参数,那么该模型被称为可辨认的。带有潜变量的模型通常是不可辨认的,因为通过相互交换潜变量我们能得到等价的模型。例如,考虑神经网络的第一层,我们可以交换单元i和单元j的传入权重向量、传出权重向量而得到等价的模型。如果神经网络有m层,每层有n个单元,那么会有n!m种排列隐藏单元的方式。这种不可辨认性被称为权重空间对称性(weight space symmetry)。
除了权重空间对称性,很多神经网络还有其他导致不可辨认的原因。例如,在任意整流线性网络或者maxout网络中,我们可以将传入权重和偏置扩大α倍,然后将传出权重扩大1/α倍,而保持模型等价。这意味着,如果代价函数不包括如权重衰减这种直接依赖于权重而非模型输出的项,那么整流线性网络或者maxout网络的每一个局部极小点都在等价的局部极小值的(m*n)维双曲线上。
这些模型可辨识性问题意味着神经网络代价函数具有非常多、甚至不可数无限多的局部极小值。然而,所有这些由于不可辨识性问题而产生的局部极小值都有相同的代价函数值。因此,这些局部极小值并非是非凸所带来的问题。如果局部极小值相比全局最小点拥有很大的代价,局部极小值会带来很大的隐患。我们可以构建没有隐藏单元的小规模神经网络,其局部极小值的代价比全局最小点代价大很多。如果具有很大代价的局部极小值是常见的,那么这将给基于梯度的优化算法带来很大的问题。
对于实际中感兴趣的网络,是否存在大量代价很高的局部极小值,优化算法是否会碰到这些局部极小值,都是尚未解决的公开问题。多年来,大多数从业者认为局部极小值是困扰神经网络优化的常见问题。如今,情况有所变化。这个问题仍然是学术界的热点问题,但是学者们现在猜想,对于足够大的神经网络而言,大部分局部极小值都具有很小的代价函数,我们能不能找到真正的全局最小点并不重要,而是需要在参数空间中找到一个代价很小(但不是最小)的点。
一种能够排除局部极小值是主要问题的检测方法是画出梯度范数随时间的变化。如果梯度范数没有缩小到一个微小的值,那么该问题既不是局部极小值,也不是其他形式的临界点。在高维空间中,很难明确证明局部极小值是导致问题的原因。许多并非局部极小值的结构也具有很小的梯度。
高原、鞍点和其它平坦区域:对于很多高维非凸函数而言,局部极小值(以及极大值)事实上都远少于另一类梯度为零的点:鞍点。鞍点附近的某些点比鞍点有更大的代价,而其他点则有更小的代价。在鞍点处,Hessian矩阵同时具有正负特征值。位于正特征值对应的特征向量方向的点比鞍点有更大的代价,反之,位于负特征值对应的特征向量方向的点有更小的代价。我们可以将鞍点视为代价函数某个横截面上的局部极小点,同时也可以视为代价函数某个横截面上的局部极大点。多类随机函数表现出以下性质:低维空间中,局部极小值很普遍。在更高维空间中,局部极小值很罕见,而鞍点则很常见。对于这类函数f:Rn→R而言,鞍点和局部极小值的数目比率的期望随n指数级增长。
对于牛顿法而言,鞍点显然是一个问题。梯度下降旨在朝”下坡”移动,而非明确寻求临界点。而牛顿法的目标是寻求梯度为零的点。如果没有适当的修改,牛顿法就会跳进一个鞍点。高维空间中鞍点的激增或许解释了在神经网络训练中为什么二阶方法无法成功取代梯度下降。
除了极小值和鞍点,还存在其他梯度为零的点。例如从优化的角度看与鞍点很相似的极大值,很多算法不会被吸引到极大值,除了未经修改的牛顿法。和极小值一样,许多种类的随机函数的极大值在高维空间中也是指数级稀少。
也可能存在恒值的、宽且平坦的区域。在这些区域,梯度和Hessian矩阵都是零。这种退化的情形是所有数值优化算法的主要问题。在凸问题中,一个宽而平坦的区间肯定包含全局极小值,但是对于一般的优化问题而言,这样的区域可能会对应着目标函数中一个较高的值。
悬崖和梯度爆炸:多层神经网络通常存在像悬崖一样的斜率较大区域。这是由于几个较大的权重相乘导致的。遇到斜率极大的悬崖结构时,梯度更新会很大程度地改变参数值,通常会完全跳过这类悬崖结构。不管我们是从上还是从下接近悬崖,情况都很糟糕,但幸运的是我们可以用使用启发式梯度截断(gradient clipping)来避免其严重的后果。其基本想法源自梯度并没有指明最佳步长,只说明了在无限小区域内的最佳方向。当传统的梯度下降算法提议更新很大一步时,启发式梯度截断会干涉来减小步长,从而使其不太可能走出梯度近似为最陡下降方向的悬崖区域。悬崖结构在循环神经网络的代价函数中很常见,因为这类模型会涉及到多个因子的相乘,其中每个因子对应一个时间步。因此,长期时间序列会产生大量相乘。
长期依赖:当计算图变得极深时,神经网络优化算法会面临的另外一个难题就是长期依赖问题-----由于变深的结构使模型丧失了学习到先前信息的能力,让优化变得极其困难。深层的计算图不仅存在于前馈网络,还存在于循环网络中。因为循环网络要在很长时间序列的各个时刻重复应用相同操作来构建非常深的计算图,并且模型参数共享,这使问题更加凸显。
非精确梯度:大多数优化算法的先决条件都是我们知道精确的梯度或是Hessian矩阵。在实践中,通常这些量会有噪声,甚至是有偏的估计。几乎每一个深度学习算法都需要基于采样的估计,至少使用训练样本的小批量来计算梯度。在其他情况,我们希望最小化的目标函数实际上是难以处理的。当目标函数不可解时,通常其梯度也是难以处理的。在这种情况下,我们只能近似梯度。例如,对比散度是用来近似玻尔兹曼机中难以处理的对数似然梯度的一种技术。各种神经网络优化算法的设计都考虑到了梯度估计的缺陷。我们可以选择比真实损失函数更容易估计的代理损失函数来避免这个问题。
局部和全局结构间的弱对应:Goodfellow认为大部分训练的运行时间取决于到达解决方案的轨迹长度。大多数优化研究的难点集中于训练是否找到了全局最小点、局部极小点或是鞍点,但在实践中神经网络不会到达任何一种临界点。甚至,这些临界点不一定存在。
优化的理论限制:一些理论结果表明,我们为神经网络设计的任何优化算法都有性能限制。通常这些结果不影响神经网络在实践中的应用。一些理论结果仅适用于神经网络的单元输出离散值的情况。然而,大多数神经网络单元输出光滑的连续值,使得局部搜索求解优化可行。一些理论结果表明,存在某类问题是不可解的,但很难判断一个特定问题是否属于该类。其他结果表明,寻找给定规模的网络的一个可行解是很困难的,但在实际情况中,我们通过设置更多参数,使用更大的网络,能轻松找到可接受的解。此外,在神经网络训练中,我们通常不关注某个函数的精确极小点,而只关注将其值下降到足够小以获得一个良好的泛化误差。对优化算法是否能完成此目标进行理论分析是非常困难的。
3. 基本算法
随机梯度下降:随机梯度下降(SGD)及其变种很可能是一般机器学习中应用最多的优化算法,特别是在深度学习中。SGD算法中的一个关键参数是学习率。在实践中,有必要随着时间的推移逐渐降低学习率。
SGD中梯度估计引入的噪声源(m个训练样本的随机采样)并不会在极小点处消失。相比之下,当我们使用批量梯度下降到达极小点时,整个代价函数的真实梯度会变得很小,之后为0,因此批量梯度下降可以使用固定的学习率。
学习率可通过试验和误差来选取,通常最好的选择方法是监测目标函数值随时间变化的学习曲线。使用线性策略时,需要选择的参数为ε0,ετ,τ。通常τ被设为需要反复遍历训练集几百次的迭代次数。通常ετ应设为大约ε0的1%。主要问题是如何设置ε0。若ε0太大,学习曲线将会剧烈振荡,代价函数值通常会明显增加。温和的振荡是良好的,容易在训练随机代价函数(例如使用Dropout的代价函数)时出现。如果学习率太小,那么学习过程会很缓慢。如果初始学习率太低,那么学习可能会卡在一个相当高的代价值。通常,就总训练时间和最终代价值而言,最优初始学习率的效果会好于大约迭代100次左右后最佳的效果。因此,通常最好是检测最早的几轮迭代,选择一个比在效果上表现最佳的学习率更大的学习率,但又不能太大导致严重的震荡。
SGD及相关的小批量亦或更广义的基于梯度优化的在线学习算法,一个重要的性质是每一步更新的计算时间不依赖训练样本数目的多寡。即使训练样本数目非常大时,它们也能收敛。对于足够大的数据集,SGD可能会在处理整个训练集之前就收敛到最终测试集误差的某个固定容差范围内。
研究优化算法的收敛率,一般会衡量额外误差(excess error),即当前代价函数超出最低可能代价的量。我们也可以在学习过程中逐渐增大小批量的大小,以此权衡批量梯度下降和随机梯度下降两者的优点。
动量(momentum):虽然随机梯度下降仍然是非常受欢迎的优化方法,但其学习过程有时会很慢。动量方法旨在加速学习,特别是处理高曲率、小但一致的梯度,或是带噪声的梯度。动量算法积累了之前梯度指数级衰减的移动平均,并且继续沿该方向移动。动量的主要目的是解决两个问题:Hessian矩阵的病态条件和随机梯度的方差。从形式上看,动量算法引入了变量v充当速度角色----它代表参数在参数空间移动的方向和速率。
Nesterov动量:动量算法的一个变种。Nesterov动量和标准动量之间的区别体现在梯度计算上。Nesterov动量中,梯度计算在施加当前速度之后。因此,Nesterov动量可以解释为往标准动量方法中添加了一个校正因子。
4. 参数初始化策略:深度学习模型的训练算法通常是迭代的,因此要求使用者指定一些开始迭代的初始点。此外,训练深度模型是一个足够困难的问题,以致于大多数算法都很大程度地受到初始化选择的影响。初始点能够决定算法是否收敛,有些初始点十分不稳定,使得该算法会遭遇数值困难,并完全失败。当学习收敛时,初始点可以决定学习收敛得多块,以及是否收敛到一个代价高或低的点。此外,差不多代价的点可以具有区别极大的泛化误差,初始点也可以影响泛化。
现代的初始化策略是简单的、启发式的。设定改进的初始化策略是一项困难的任务,因为神经网络优化至今还未被很好地理解。大多数初始化策略基于在神经网络初始化时实现一些很好的性质。然而,我们并没有很好地理解这些性质中的哪些会在学习开始进行后的哪些情况下得以保持。进一步的难点是,有些初始点从优化的观点看或许是有利的,但是从泛化的观点看是不利的。我们对于初始点如何影响泛化的理解是相当原始的,几乎没有提供如何选择初始点的任何指导。
也许完全确知的唯一特性是初始参数需要在不同单元间”破坏对称性”。如果具有相同激活函数的两个隐藏单元连接到相同的输入,那么这些单元必须具有不同的初始参数。如果它们具有相同的初始参数,然后应用到确定性损失和模型的确定性学习算法将一直以相同的方式更新这两个单元。即使模型或训练算法能够使用随机性为不同的单元计算不同的更新(例如使用Dropout的训练),通常来说,最好还是初始化每个单元使其和其他单元计算不同的函数。这或许有助于确保没有输入模式丢失在前向传播的零空间中,没有梯度模式丢失在反向传播的零空间中。每个单元计算不同函数的目标促使了参数的随机初始化。我们可以明确地搜索一大组彼此互不相同的基函数,但这经常会导致明显的计算代价。例如,如果我们有和输出一样多的输入,我们可以使用Gram-Schmidt正交化于初始的权重矩阵,保证每个单元计算彼此非常不同的函数。在高维空间上使用高熵分布来随机初始化,计算代价小并且不太可能分配单元计算彼此相同的函数。
通常情况下,我们可以为每个单元的偏置设置启发式挑选的常数,仅随机初始化权重。额外的参数(例如用于编码预测条件方差的参数)通常和偏差一样设置为启发式选择的常数。
我们几乎总是初始化模型的权重为高斯或均匀分布中随机抽取的值。高斯或均匀分布的选择似乎不会有很大的差别,但也没有被详尽地研究。然而,初始分布的大小确实对优化过程的结果和网络泛化能力都有很大的影响。
更大的初始权重具有更强的破坏对称性的作用,有助于避免冗余的单元。它们也有助于避免在每层线性成分的前向或反向传播中丢失信号----矩阵中更大的值在矩阵乘法中有更大的输出。如果初始权重太大,那么会在前向传播或反向传播中产生爆炸的值。在循环网络中,很大的权重也可能导致混沌(chaos)(对于输入中很小的扰动非常敏感,导致确定性前向传播过程表现随机)。在一定程度上,梯度爆炸问题可以通过梯度截断来缓解(执行梯度下降步骤之前设置梯度的阈值)。较大的权重也会产生使得激活函数饱和的值,导致饱和单元的梯度完全丢失。这些竞争因素决定了权重的理想初始大小。
关于如何初始化网络,正则化和优化有着非常不同的观点。优化观点建议权重应该足够大以成功传播信息,但是正则化希望其小一点。诸如随机梯度下降这类对权重较小的增量更新,趋于停止在更靠近初始参数的区域(不管是由于卡在低梯度的区域,还是由于触发了基于过拟合的提前终止准则)的优化算法倾向于最终参数应接近于初始参数。在一般情况下,提前终止的梯度下降和权重衰减不同,但是提供了一个宽松的类比去考虑初始化的影响。
有些启发式方法可用于选择权重的初始大小。一种初始化m个输入和n输出的全连接层的权重的启发式方法是从分布中采样权重,如下公式,
而Glorot建议使用标准初始化(normalized initialization),如下
后一种启发式方法初始化所有的层,折衷于使其具有相同激活方差和使其具有相同梯度方差之间。这假设网络是不含非线性的链式矩阵乘法,据此推导得出。现实的神经网络显然会违反这个假设,但很多设计于线性模型的策略在其非线性对应中的效果也不错。
Saxe推荐初始化为随机正交矩阵,仔细挑选负责每一层非线性缩放或增益(gain)因子g。他们得到了用于不同类型的非线性激活函数的特定缩放因子。这种初始化方案也是启发于不含非线性的矩阵相乘序列的深度网络。在该模型下,这个初始化方案保证了达到收敛所需的训练迭代总数独立于深度。
可惜,这些初始权重的最佳准则往往不会带来最佳效果。这可能有三种不同的原因。首先,我们可能使用了错误的标准----它实际上并不利于保持整个网络信号的范数。其次,初始化时强加的性质可能在学习开始进行后不能保持。最后,该标准可能成功提高了优化速度,但意外地增大了泛化误差。在实践中,我们通常需要将权重范围视为超参数,其最优值大致接近,但并不完全等于理论预测。
设置偏置的方法必须和设置权重的方法协调。设置偏置为零通常在大多数权重初始化方案中是可行的。存在一些我们可能设置偏置为非零值的情况:
(1)、如果偏置是作为输出单元,那么初始化偏置以获取正确的输出边缘统计通常是有利的。要做到这一点,我们假设初始权重足够小,该单元的输出仅由偏置决定。这说明设置偏置为应用于训练集上输出边缘统计的激活函数的逆。
(2)、有时,我们可能想要选择偏置以避免初始化引起太大饱和。例如,我们可能会将ReLU的隐藏单元设为0.1而非0,以避免ReLU在初始化时饱和。尽管这种方法违背不希望偏置具有很强输入的权重初始化准则。例如,不建议使用随机游走初始化。
(3)、有时,一个单元会控制其他单元能否参与到等式中。在这种情况下,我们有一个单元输出u,另一个单元h∈[0;1],那么我们可以将h视作门,以决定uh≈1还是uh≈0。在这种情形下,我们希望设置偏置h,使得在初始化的大多数情况下h≈1。否则,u没有机会学习。
除了这些初始化模型参数的简单常数或随机方法,还有可能使用机器学习初始化模型参数。
5. 适应学习率算法
Delta-bar-delta算法是一个早期的在训练时适应模型参数各自学习率的启发式方法。该方法基于一个很简单的想法,如果损失对于某个给定模型参数的偏导保持相同的符号,那么学习率应该增加。如果对于该参数的偏导变化了符号,那么学习率应减小。当然,这种方法只能应用于全批量优化中。
AdaGrad算法:独立地适应所有模型参数的学习率。具有损失最大偏导的参数相应地有一个快速下降的学习率,而具有小偏导的参数在学习率上有相对较小的下降。AdaGrad在某些深度学习模型上效果不错,但不是全部。
RMSProp算法:修改AdaGrad以在非凸设定下效果更好,改变梯度积累为指数加权的移动平均。AdaGrad旨在应用于凸问题时快速收敛。当应用于非凸函数训练神经网络时,学习轨迹可能穿过了很多不同的结构,最终到达一个局部是凸碗的区域。AdaGrad根据平方梯度的整个历史收缩学习率,可能使得学习率在达到这样的凸结构前就变得太小了。RMSProp使用指数衰减平均以丢弃遥远过去的历史,使其能够在找到凸碗状结构后快速收敛,它就像一个初始化于该碗状结构的AdaGrad算法实例。经验上,RMSProp已被证明是一种有效且实用的深度神经网络优化算法。目前它是深度学习从业者经常采用的优化方法之一。
Adam:早期算法背景下,它也许最好被看作结合RMSProp和具有一些重要区别的动量的变种。首先,在Adam中,动量直接并入了梯度一阶矩(指数加权)的估计。将动量加入RMSProp最直观的方法是将动量应用于缩放后的梯度。结合缩放的动量使用没有明确的理论动机。其次,Adam包括偏置修正,修正从原点初始化的一阶矩(动量项)和(非中心的)二阶矩的估计。RMSProp也采用了(非中心的)二阶矩估计,然而缺失了修正因子。因此,不像Adam,RMSProp二阶矩估计可能在训练初期有很高的偏置。Adam通常被认为对超参数的选择相当鲁棒,尽管学习率有时需要从建议的默认修改。
目前,最流行并且使用很高的优化算法包括SGD、具动量的SGD、RMSProp、具动量的RMSProp、AdaDelta和Adam。
6. 二阶近似方法
牛顿法:与一阶方法相比,二阶方法使用二阶导数改进优化。最广泛使用的二阶方法是牛顿法。牛顿法是基于二阶泰勒级数展开在某点θ0附近类近似J(θ)的优化方法,其忽略了高阶导数。牛顿法只适用于Hessian矩阵是正定的情况。在深度学习中,目标函数的表面通常非凸(有很多特征),如鞍点。因此使用牛顿法是有问题的。如果Hessian矩阵的特征值并不都是正的,例如,靠近鞍点处,牛顿法实际上会导致更新朝错误的方向移动。这种情况可以通过正则化Hessian矩阵来避免。常用的正则化策略包括在Hessian矩阵对角线上增加常数α. 除了目标函数的某些特征带来的挑战,如鞍点,牛顿法用于训练大型神经网络还受限于其显著的计算负担。Hessian矩阵中元素数目是参数数量的平方,因此,如果参数数目为k(甚至是在非常小的神经网络中k也可能是百万级别),牛顿法需要计算k*k矩阵的逆,计算复杂度为O(k3)。另外,由于参数将每次更新都会改变,每次训练迭代都需要计算Hessian矩阵的逆。其结果是,只有参数很少的网络才能在实际中用牛顿法训练。
共轭矩阵:是一种通过迭代下降的共轭方向(conjugate directions)以有效避免Hessian矩阵求逆计算的方法。这种方法的灵感来自于对最速下降方法弱点的仔细研究,其中线性搜索迭代地用于与梯度相关的方向上。
Broyden-Fletcher-Goldfarb-Shanno(BFGS)算法:具有牛顿法的一些优点,但没有牛顿法的计算负担。在这方面,BFGS和CG很像。然而,BFGS使用了一个更直接的方法近似牛顿更新。
7. 优化策略和元算法:许多优化技术并非真正的算法,而是一般化的模板,可以特定地产生算法,或是并入到很多不同的算法中。
批标准化:实际上它并不是一个优化算法,而是一个自适应的重参数化的方法,试图解决训练非常深的模型的困难。非常深的模型会涉及多个函数或层组合。在其它层不改变的假设下,梯度用于如何更新每一个参数。在实践中,我们同时更新所有层。当我们进行更新时,可能会发生一些意想不到的结果,这是因为许多组合在一起的函数同时改变时,计算更新的假设是其他函数保持不变。批标准化提出了一种几乎可以重参数化所有深度网络的优雅方法。重参数化显著减少了多层之间协调更新的问题。批标准化可应用于网络的任何输入层或隐藏层。
坐标下降:在某些情况下,将一个优化问题分解成几个部分,可以更快地解决原问题。如果我们相对于某个单一变量xi最小化f(x),然后相对于另一个变量xj等等,反复循环所有的变量,我们会保证到达(局部)极小值。这种做法被称为坐标下降(coordinate descent),因为我们一次优化一个坐标。更一般地,块坐标下降(blockcoordinate descent)是指对于某个子集的变量同时最小化。术语”坐标下降”通常既指块坐标下降,也指严格的单个坐标下降。当优化问题中的不同变量能够清楚地分成相对独立的组,或是当优化一组变量明显比优化所有变量效率更高时,坐标下降最有意义。当一个变量的值很大程度地影响另一个变量的最优值时,坐标下降不是一个很好的方法。
Polyak平均:会平均优化算法在参数空间访问轨迹中的几个点。
监督预训练:有时,如果模型太复杂难以优化,或是如果任务非常困难,直接训练模型来解决特定任务的挑战可能太大。有时训练一个较简单的模型来求解问题,然后使模型更复杂会更有效。训练模型来求解一个简化的问题,然后转移到最后的问题,有时也会更有效些。这些在直接训练目标模型求解目标问题之前,训练简单模型求解简化问题的方法统称为预训练(pretraining)。
贪心算法(greedy algorithm)将问题分解成许多部分,然后独立地在每个部分求解最优值。令人遗憾的是,结合各个最佳的部分不能保证得到一个最佳的完整解。然而,贪心算法计算上比求解最优联合解的算法高效得多,并且贪心算法的解在不是最优的情况下,往往也是可以接受的。贪心算法也可以紧接一个微调(fine-tuning)阶段,联合优化算法搜索全问题的最优解。使用贪心解初始化联合优化算法,可以极大地加速算法,并提高寻找到的解的质量。预训练算法,特别是贪心预训练,在深度学习中是普遍存在的。
在贪心监督预训练(greedy supervised pretraining)的原始版本中,每个阶段包括一个仅涉及最终神经网络的子集层的监督学习训练任务。
设计有助于优化的模型:改进优化的最好方法并不总是改进优化算法。相反,深度模型中优化的许多改进来自于设计易于优化的模型。在实践中,选择一族容易优化的模型比使用一个强大的优化算法更重要。现代神经网络的设计选择体现在层之间的线性变换,几乎处处可导的激活函数,和大部分定义域都有明显的梯度。
延拓法和课程学习:许多优化挑战都来自于代价函数的全局结构,不能仅通过局部更新方向上更好的估计来解决。解决这个问题的主要方法是尝试初始化参数到某种区域内,该区域可以通过局部下降很快连接到参数空间中的解。
延拓法(continuation method)是一族通过挑选初始点使优化更容易的方法,以确保局部优化花费大部分时间在表现良好的空间。延拓法的背后想法是构造一系列具有相同参数的目标函数。为了最小化代价函数J(θ),我们构建新的代价函数{J(0),…, J(n)}。这些代价函数的难度逐步提高,其中J(0)是最容易最小化的,J(n)是最难的,真正的代价函数驱动整个过程。当我们说J(i)比J(i+1)更容易时,是指其在更多的θ空间上表现良好。随机初始化更有可能落入局部下降可以成功最小化代价函数的区域,因为其良好区域更大。这系列代价函数设计为前一个解是下一个的良好初始点。因此,我们首先解决一个简单的问题,然后改进解以解决逐步变难的问题,直到我们求解真正问题的解。传统的延拓法(用于神经网络训练之前的延拓法)通常基于平滑目标函数。传统上,延拓法主要用来克服局部极小值的问题。具体地,它被设计来在有很多局部极小值的情况下,求解一个全局最小点。这些连续方法会通过”模糊”原来的代价函数来构建更容易的代价函数。
课程学习(curriculum learning)或者塑造(shaping)的方法可以被解释为延拓法。课程学习基于规划学习过程的想法,首先学习简单的概念,然后逐步学习依赖于这些简化概念的复杂概念。
以上内容摘自:《深度学习中文版》
GitHub: https://github.com/fengbingchun/NN_Test
相关文章:

飞凌OK6410开发板移植u-boot官方最新版u-boot-2012.10.tar.bz2
Part0 准备知识 0.1 关键参数说明 0.1.1 开发板说明 OK6410是飞凌公司发布的一款开发板,当前有2个版本,OK6410-A和OK6410-B,我当前使用的是前者;前者也经历过升级,所以有128M ram的和较新的256内存的版本,n…

参数量110亿,附赠750GB数据集,Google提NLP预训练模型T5
整理 | Just,夕颜出品 | AI科技大本营(ID:rgznai100)近日,Google 在最新一篇共有 53 页的论文《Exploring the Limits of Transfer Learning with a Unified Text-to-Text Transformer》中,提出了一个最新的预训练模型…

Linux之bash编程基本语法
在Linux运维工作中,我们为了提高工作效率通常会用bash编写脚本来完成某工作。今天就来为大家介绍bash的一些常见的基本语法。在讲解bash语法之前首先介绍一下bash。bash环境主要是由解释器来完成的。【解释器】:解释命令:词法分析、语法分析、…

深度学习中的卷积网络简介
卷积网络(convolutional network)也叫做卷积神经网络(convolutional neural network, CNN),是一种专门用来处理具有类似网格结构的数据的神经网络。例如时间序列数据(可以认为是在时间轴上有规律地采样形成的一维网格)和图像数据(可以看作是二维的像素网格)。卷积网…

Windows下搭建PHP开发环境
PHP集成开发环境有很多,如XAMPP、AppServ......只要一键安装就把PHP环境给搭建好了。但这种安装方式不够灵活,软件的自由组合不方便,同时也不利于学习。所以我还是喜欢手工搭建PHP开发环境,需要哪个模块自己安装就行了,…

大数据时代下的新生态、新洞察、新趋势 | 神策 2019 数据驱动大会
10 月 22 日,以“矩•变”为主题的神策 2019 数据驱动大会在北京维景国际大酒店顺利举行,来自全球大数据各大行业的领袖人物聚首北京,融合国际前沿技术与行业实践,深入探讨大数据时代下的新生态、新洞察、新趋势。 大会主题“矩•…
ckedit 文本编辑器
Ckeditor是一个功能非常强大的富文本编辑器,博客园有使用此编辑器,其功能完全可以与MS的Word媲美。 用起来也非常方便。下面是本人总结的安装步骤: 第一步,从http://ckeditor.com/download 下载ckeditor文件包 第二步,…

为什么我害怕数据结构学得好的程序员?
我害怕数据结构学得好的程序员,一跟他们讨论技术,我就感觉自己不是程序员,仅仅是在搬砖维持生活。我所拥有的编程技巧是什么?不就是每个程序员都会的,对数据库的增删改查吗?每一个初入职场的程序员都会。但…
Go语言基础介绍
Go是一个开源的编程语言。Go语言被设计成一门应用于搭载Web服务器,存储集群或类似用途的巨型中央服务器的系统编程语言。目前,Go最新发布版本为1.10.Go语言可以运行在Linux、FreeBSD、Mac OS X和Windows系统上。1. 结构:Go语言的基础组成有以…
强制退出WinForm程序之Application.Exit和Environment.Eixt
这几天在做一个把大量Infopath生成的XML数据,进行处理的程序,我用了MDI子窗体,每个窗体包含了各自的功能,如,遍历目录及其子目录检查文件类型并自动生成Sql语句并入库、对Infopath数据的自动检查、对数据中的某些域的替…
Oracle Study之--Oracle等待事件(3)
Oracle Study之--Oracle等待事件(3)Db file parallel read这是一个很容易引起误导的等待事件,实际上这个等待事件和并行操作(比如并行查询,并行DML)没有关系。 这个事件发生在数据库恢复的时候,…
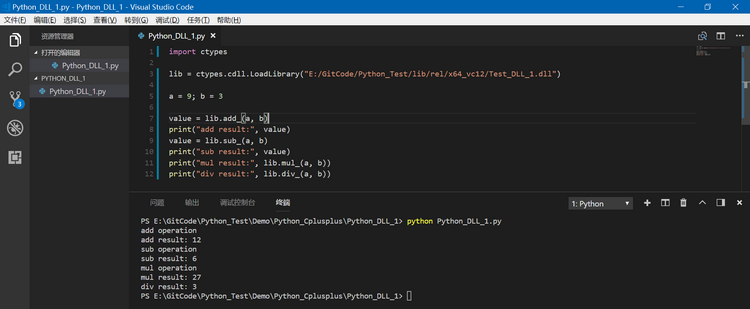
Windows下通过Python 3.x的ctypes调用C接口
在Python中可以通过ctypes来调用动态库中的C接口,具体操作过程如下:1. 使用vs2013创建一个加、减、乘、除的动态库,并对外提供C接口,code内容如下:math_operations.hpp: #ifndef TEST_DLL_1_MATH_OPERATIONS_HPP_ #def…

如何在3天内拿下DigSci大赛的亚军?| DigSci科学数据挖掘大赛
作者 | 朱翔宇(DOTA)来源 | AI算法之心(AIHeartForYou)【导读】本文将基于作者在中国计算机大会方案宣讲PPT中的内容,给出此次比赛的完整方案,主要从赛题理解、建模核心思路、算法核心思想等角度阐述,同时对相关细节进…
如何获得Oracle系统性能统计? Oracle大型数据库系统在AIXUNIX上的实战详解 集中讨论 14...
累计读者的来信中,有若干位同仁谈到Oracle的性能问题。什么叫性能慢?怎么量化性能统计?问题我不一一列出了,下面的文字大部分来自Oracle 英文文档,我认为描述的极为精确,比我说的强。 如果有效地诊断性能问…
百度搜索查询命令——组合型
在百度上搜索一下,就会出现一堆关于查询搜索的命令,比如:site,domain,双引号,减号等等。今日,我简单总结一点组合型命令,希望对大家有帮助。 1、domain命令、减号-和的inurl组合 公式…
Delphi多线程编程中的技巧
1)创建线程 MsgThread : TMsgThread.Create(False) ; //创建并执行线程 MsgThread : TMsgThread.Create(True) ; //创建线程后挂起 constructor Create(CreateSuspended: Boolean); 中的参数CreateSuspended表示创建后是否挂起线程。 (2)设置…
Ubuntu14.04下配置OpenGL及测试代码
ubuntu14.04 64位下,默认是没有安装OpenGL相关依赖库的,若安装,则依次执行如下几条命令即可: $ sudo apt-get update $ sudo apt-get install build-essential $ sudo apt-get install libgl1-mesa-dev $ sudo apt-get install li…

VarGFaceNet:地平线提出轻量级、有效可变组卷积的人脸识别网络
作者 | Mengjia Yan、Mengao Zhao、Zining Xu、Qian Zhang、Guoli Wang、Zhizhong Su译者 | 刘畅编辑 | Jane出品 | AI科技大本营(ID:rgznai100)【导读】为了提高用于人脸识别的轻量级网络的判别和泛化能力,本文提出了一种有效的可…
【TortoiseSVN使用教程】
TortoiseSVN使用教程 TortoiseSVN是一个SVN的客户端 1.Checkout Repository 首 先要Checkout服务器端的Repository,所谓的Checkout就是指获得服务器端指定的Repository。存储的所有文件这个 Checkout和Visual Source Safe的Checkout意义完全不一样࿰…

[ASP.NET MVC 小牛之路]10 - Controller 和 Action (2)
继上一篇文章之后,本文将介绍 Controller 和 Action 的一些较高级特性,包括 Controller Factory、Action Invoker 和异步 Controller 等内容。 本文目录 开篇:示例准备 文章开始之前,我们先来了解一下一个请求的发出到Action方法处…
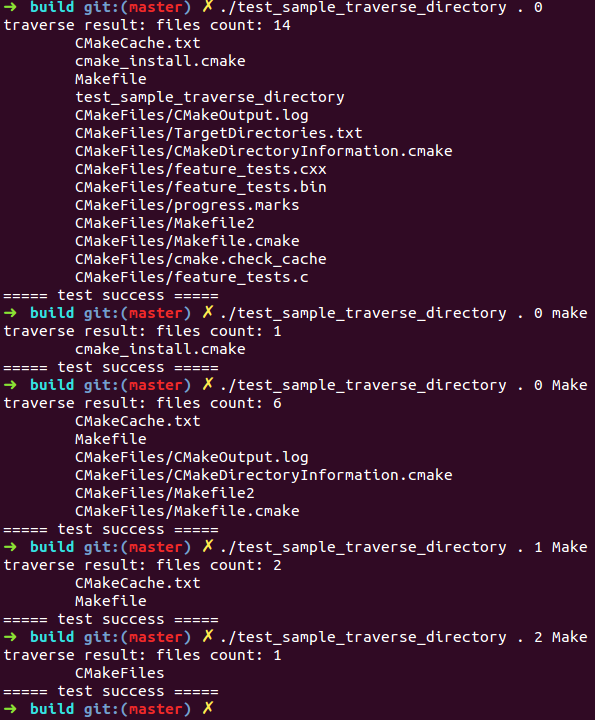
Linux下遍历指定目录的C++实现
之前在 https://blog.csdn.net/fengbingchun/article/details/51474728 给出了在Windows遍历指定文件夹的C实现,这里给出在Linux下遍历目录的实现,Windows和Linux下的实现都是参考了OpenCV 2.x中的实现,OpenCV中的用法可参考https://blog.csd…

要活102年,阿里凭借的是什么?
由浅到深、由轻到重、由拥抱到创新,看似“风平浪静”的历史背后,中国互联网江湖的发展实则“波涛汹涌”。对于身处核心位置的科技巨头阿里巴巴而言,将如何更好地去实现“希望活 102 年”的愿景?凭借的究竟又是什么?作者…

Go基础知识学习(6) 接口
2019独角兽企业重金招聘Python工程师标准>>> Golang接口定义使用interface来声明,它相对于其他语言最大的特定就是接口定义和实现的关联性仅仅依赖接口的名字和声明,无需显式声明。 接口定义和实现 在下面这个例子中,定义了两个自…
多模态数据+知识图谱,这次你的疑难杂症有解了!
数据是AI的基础,不同行业领域的数据来源广泛、形式多样,其每一种来源或形式都可以看作是一种模态,例如视频、图片、语音以及工业场景下的传感数据,红外、声谱等。多模态数据的语义理解与知识表示让智能体能更深入地感知、理解真实…
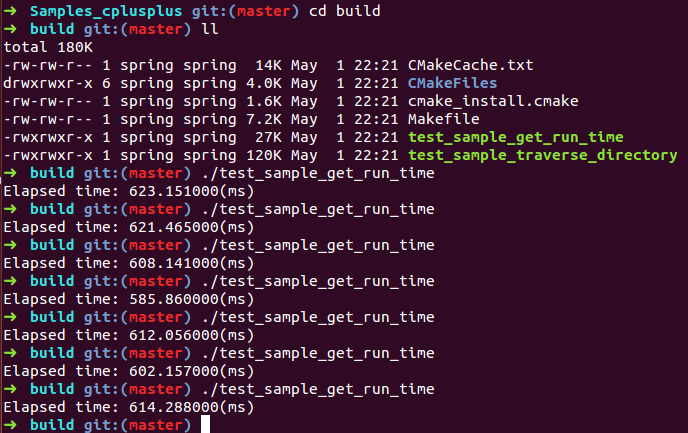
Linux下通过gettimeofday函数获取程序段执行时间
在Linux下计算某个程序段执行的时间一般使用gettimeofday函数,此函数的声明在sys/time.h文件中。此函数接收两个结构体参数,分别为timeval、timezone.两个结构体的声明如下:struct timeval {time_t tv_sec; /* seconds */long tv_usec; /* mi…
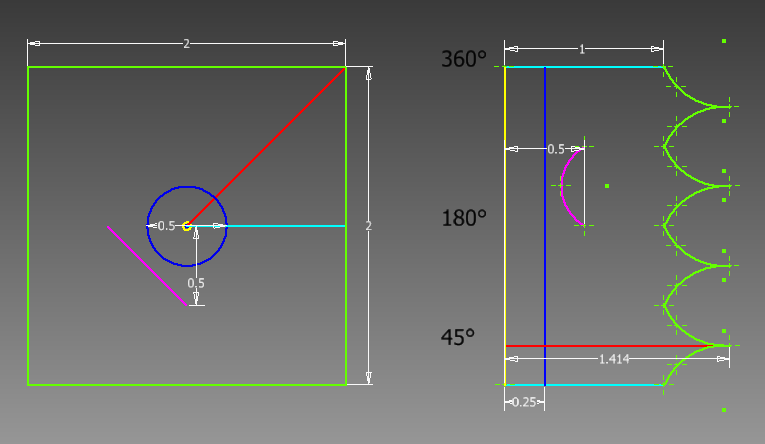
matlab练习程序(Log Polar变换)
Log Polar就是所谓的极坐标变换,通过变换能将笛卡尔坐标系中的图像映射到极坐标系中。 确切的来说我这里不算是Log Polar,因为Log Polar是将图像从(x,y)映射到(log(r),theta),而我是将图像从(x,y࿰…
SiteMapPath基本用法
1、添加一个网站地图项 Web.sitemap项 2、在 Web.sitemap项的写法如下: <?xml version"1.0" encoding"utf-8"?><siteMap xmlns"http://schemas.microsoft.com/AspNet/SiteMap-File-1.0"><siteMapNode url"defa…

closurescallbacks
引用文章原文地址:(声明:文章只为自己总结知识,内容东拼西凑,版权归以下作者所有。) 1. Wikipedia: callback(computer science) 2. Implement callback routines in Java By John D. Mitchell, JavaWorld.…
吴恩达老师深度学习视频课笔记:卷积神经网络
计算机视觉:包括图像分类(image classification)、目标检测(object detection)、风格迁移(neural style transfer)等等。边缘检测示例:神经网络的前几层可以检测边缘,然后后面几层可能检测到物体的部分,接下来靠后的一些层可能检测…
COCO 2019挑战赛,旷视研究院拿下三项计算机识别冠军 | ICCV 2019
出品 | AI科技大本营(ID:rgznai100)10月27日,两年一度的国际计算机视觉大会ICCV 2019(InternationalConference on Computer Vision)在韩国首尔开幕。作为ICCV 2019重头戏,COCO 是人工智能领域最具影响力的…