ROS_Kinetic ubuntu 16.04
ROS_Kinetic系列学习(一),在ubuntu 16.04安装ROS Kinetic。
http://wiki.ros.org/kinetic/Installation/Ubuntu
通过网页快速了解Linux(Ubuntu)和ROS机器人操作系统,请参考实验楼在线系统如下:
纯净定制版镜像已经发布,供ROS爱好者交流学习,在如下链接:http://blog.csdn.net/zhangrelay/article/details/54632130
Ubuntu 16.04 + ROS Kinetic 机器人操作系统学习镜像分享与使用安装说明
ubuntu16.04已经发布半年多了,ROS的Kinetic版本功能包也越来越丰富了,需要了解ROS发行版及支持维护的时间等,
可以参考如下网页:http://wiki.ros.org/Distributions

参考的网址:http://wiki.ros.org/kinetic
:http://wiki.ros.org/kinetic/Installation/Ubuntu
爲了保證安裝速度,請選擇國內鏡像如下:ustc鏡像
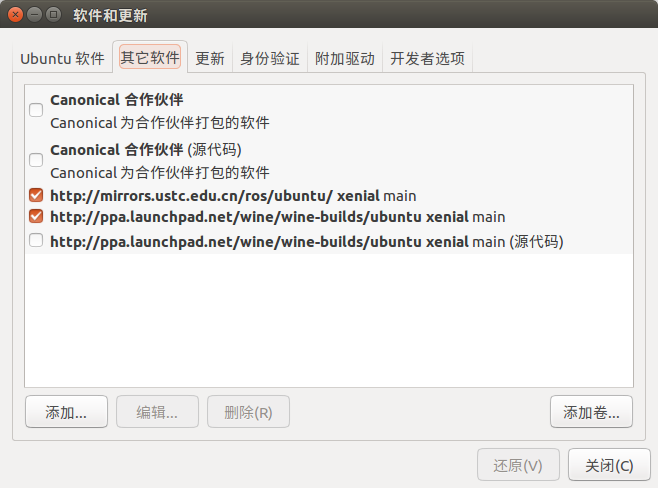
2.1 设置安装源
ROS Kinetic只支持Wily(15.10)和Xenial(16.04)对应内核分别为4.2和4.4,其他版本需要编译安装不支持直接deb软件源安装,
使用下面命令:
~$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'

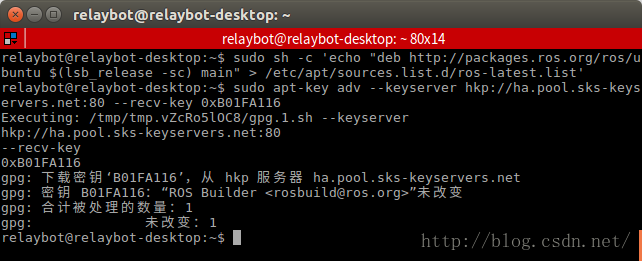
2.2 设置keys
~$ sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 0xB01FA116
Executing: /tmp/tmp.vZcRo5lOC8/gpg.1.sh --keyserver
hkp://ha.pool.sks-keyservers.net:80
--recv-key
0xB01FA116
2.3 安装
~$ sudo apt-get update
~$ sudo apt-get install ros-kinetic-desktop-full
安装功能包:
~$ sudo apt-get install ros-kinetic-PACKAGE
例如:
~$ sudo apt-get install ros-kinetic-slam-gmapping
查找在kinetic中可以使用的功能包:
~$ apt-cache search ros-kinetic
2.4 初始化
~$ sudo rosdep init
Wrote /etc/ros/rosdep/sources.list.d/20-default.list
Recommended: please run
rosdep update
~$ rosdep update
reading in sources list data from /etc/ros/rosdep/sources.list.d
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/python.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/ruby.yaml
Hit https://raw.githubusercontent.com/ros/rosdistro/master/releases/fuerte.yaml
Query rosdistro index https://raw.githubusercontent.com/ros/rosdistro/master/index.yaml
Add distro "groovy"
Add distro "hydro"
Add distro "indigo"
Add distro "jade"
Add distro "kinetic"
updated cache in /home/relaybot/.ros/rosdep/sources.cache
2.5 环境配置
~$ echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
~$ source ~/.bashrc
注意当安装多个ROS发行版,使用kinetic需要用到下面命令:
~$ source /opt/ros/kinetic/setup.bash
2.6 安装rosinstall
~$ sudo apt-get install python-rosinstall
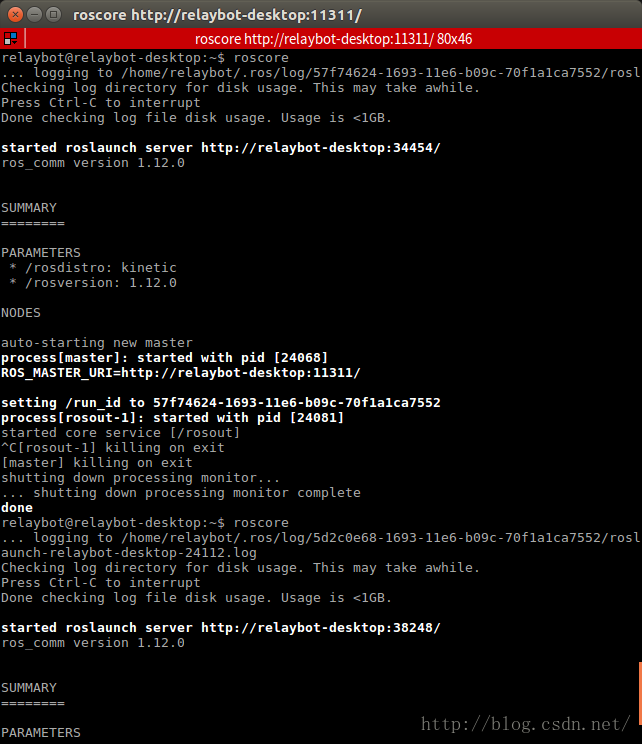
2.7 测试roscore
~$ roscore
官网的讲解还是比较清晰的大脚可以参考:http://wiki.ros.org/ROS/Tutorials/InstallingandConfiguringROSEnvironment
(该部分转载自:http://blog.csdn.net/ZhangRelay/article/details/51364622)
笔者在实现的过程中遇到了一下问题,记录一下报错以及解决方法
usb_cam安装过程:
安装包下载地址:https://github.com/ros-drivers/usb_cam
编译过程:http://blog.csdn.net/xiaocainiaoshangxiao/article/details/13293637
在官网上本节的题目是Creating a workspace for catkin,其中的catkin不知道是什么意思,在网上找到的结果是:(1)卡婷是一个广告公司,(2)葇荑花。这两种翻译显然都不太合适,不过不知道也没关系,影响不大。我们知道catkin是一个ROS中的工具就行了。本节的主要目的是创建一个catkin工作空间,在这个工作空间中,catkin的包可以被编译。
如果您还没有安装catkin的话,请首先安装catkin。不过如果按照前面的步骤的话,catkin已经安装了。
首先需要修改环境变量,按ctrl+alt+t打开一个终端,在里面输入:
- source /opt/ros/hydro/setup.bash
也可以按照前面所讲的,将其直接修改为永久性的。
创建一个工作空间:
- mkdir -p ~/catkin_ws/src
- cd ~/catkin_ws/src
通过上面两条命令,就可以创建一个工作空间,并转到已创建好的工作空间之下,尽管这个空间是空的,我们仍然可以构建(build)它:
- cd ~/catkin_ws/
- catkin_make
当时用catkin工作空间时,catkin_make是一个非常方便的命令行工具。如果您看一下当前的工作目录,您会发现里面多了两个文件夹“build”和“devel”。在devel文件夹下,您可以看到很多setup.*sh文件。输入如下命令配置您的工作空间:
- source devel/setup.bash
报错如下:-- ~~ - visualization_marker_tutorials
-- ~~ - xacro
-- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
CMake Error at catkin/cmake/catkin_workspace.cmake:95 (message):
This workspace contains non-catkin packages in it, and catkin cannot build
a non-homogeneous workspace without isolation. Try the
'catkin_make_isolated' command instead.
Call Stack (most recent call first):
CMakeLists.txt:63 (catkin_workspace)
-- Configuring incomplete, errors occurred!
See also "/home/sun/catkin_ws/build/CMakeFiles/CMakeOutput.log".
See also "/home/sun/catkin_ws/build/CMakeFiles/CMakeError.log".
Invoking "cmake" faile
解决方法:-- catkin_make 工作空间不能与 非catkin文件建立联系改用catkin_make_isolated,安心等待一会编译 完成后即可
在sun@sun:~/catkin_ws/build$ 编译即可。
扩展,ros不必使用catkin_make进行编译,而是用rosmake进行编译
当你使用rosmake进行编译的时候,如果提示没有找到这个包,那么很有可能是你没有用source ~/catkin_ws/devel/setup.bash 就是让编译器能够找到这个包
相关文章:

android 获取手机GSM/CDMA信号信息,并获得基站信息
本文转自:http://software.intel.com/zh-cn/blogs/2011/12/16/android-gsmcdma/ 在Android中我们常用的轻松获取WIFI信号列表,那如何获取CDMA或者GSM的手机信号呢?系统提供了TelephonyManager类,此类非常丰富,基本你所…
【数据结构】关键路径
在有向图中,如果用顶点表示事件,弧表示活动,弧上的权值表示活动持续的时间,这样的活动称为边表示活动的网,简称AOE网(Activity On Edge)。通常可以用AOE网来估算工程的完成时间,他不…
呼伦湖国家级自然保护区管理局投放草料保野生黄羊过冬
图为保护区工作人员正在观测黄羊的生活轨迹并记录数据。 王艳清 摄 图为保护区工作人员正在观测黄羊的生活轨迹并记录数据。 王艳清 摄 中新网呼伦贝尔1月16日电 (记者 李爱平)中国北方正是最为寒冷的时节,呼伦湖国家级自然保护区管理局内的60只野生黄羊正在面临食草…
buildroot httpd php
/********************************************************************* buildroot httpd php* 说明:* 在buildroot中选择了php,但是在测试的时候发现总是出现下面这行* 错误,库是存在的,但是却没有放对…
VS快速注释多行 以及 取消
快速注释多行:Ctrl K 然后 Ctrl C 快速取消多行注释 :Ctrl K 然后 Ctrl U
前端的一些小的效果
1 . 移动端字体自适应大小(暂时没用过,不过据说很有用也很好用) body{font-family: "Microsoft YaHei";font-size: 0.14rem;color: #666;max-width: 640px;margin: auto;}media screen and (min-width: 360px) { html {font-s…

Java虚拟机规范阅读(二)IEEE754简介以及Java虚拟机中的浮点算法
什么是浮点数在计算机系统的发展过程中,曾经提出过多种方法表达实数。典型的比如相对于浮点数的定点数(Fixed Point Number)。在这种表达方式中,小数点固定的位于实数所有数字中间的某个位置。货币的表达就可以使用这种方式&#…
【ACM】杭电OJ 5055(Bob and math problem)
http://acm.hdu.edu.cn/showproblem.php?pid5055 注意几点: 1、全部都是偶数,输出-1 2、n-1个是0,第n个不论是奇数,还是偶数,输出-1 3、n1的情况 4、将所有数字从大到小排列,挑出最小的奇数放在最后…
每天工作4小时的程序员【转】
每个人都熟悉这种作息规律:早上9点去上班,坐在电脑前面,编一天的程序,下午5点下班回家。如今,非常感谢蒂莫西费里斯 (Timothy Ferriss)的《每周工作4小时》,我开始重新思考应该如何工作,如何让自…
ARKIT/ARCore对比分析(一)
ARKit简介 ARkit是什么? 苹果为什么发布ARkit?(6月5日的苹果WWDC 2017全球开发者大会上,苹果发布了AR开发平台ARkit) 1.概述:ARkit应用平台是苹果的首个 AR 产品。iOS 11引入了ARKit应用平台,…

每个程序员必看:如何在40岁后继续做软件开发?
导读: 这是一个 42 岁的开发者所写经验分享文章.并且列出一些他 18 年多身为软件开发者的经验谈.许多部分看完后都会希望自己当时就能够了解,所以很推荐不论是新手或是老手都要好好阅读这一篇文章。 故事很长,一切从 1997 年开始讲…

【ACM】杭电OJ 1009 (FatMouse' Trade)。
两个条件貌似缺一不可 不明白为什么不能是sum(s[i].value*s[i].cat_food); #include <iostream> #include <cstdio> #include <cstring> #include <algorithm> using namespace std;const int maxn 1010;typedef …

Java图形化:布局方式
布局方式 FlowLayout:流布局 BorderLayout:边框布局 GridLayout:网格布局FlowLayout(流布局) 像Word打字,组件从左向右排列,一列排满后自动换下一行。组件默认居中对齐,可以设置左/右对齐。流布局会维持组件的原始大小…
ARKIT/ARCore对比分析(二)
ARKit(2) ARCore 和 ARKit平台特点比对 曾与一家最大的 IMU OEM 交谈过,为了节省成本,他们的智能机IMU 在工厂中只是在单一温度下进行标定。这意味着 IMU 硬件在某一指定的温度下,误差被调节到最低。但当手机发热的时候,IMU 就不…
【ACM】杭电OJ 1789(Doing Homework again)
http://acm.hdu.edu.cn/showproblem.php?pid1789 cmp函数: 先按扣分由多到少进行排序,然后如果遇到扣分一样的,则先做时间少的。 vis数组: 最要的事,放在它的截至日期那一天去做,然后,之后…
推荐使用的几款Java常用基础工具库
通用工具类(字符串、时间格式化、BeanUtils、IO)1. commons-lang3库1.1. org.apache.commons.lang3.StringUtils类日常代码中,我们经常和String字符串打交道,经常对字符串进行处理,稍微不注意的话,很容易出现类似NullPointerExcep…
ARKit 与 ARCore比对(三)
ARKit 和 ARCore剖析、结构、原理介绍 ARKit 和 ARCore 都是三部分:相机姿态估计, 环境感知(平面估计)及光源感知。 ARCore 的部分源码:https://github.com/google-ar/arcore-unity-sdk/tree/master/Assets/GoogleARCo…

前端开发之retina屏幕
像素 && ppi 首先先说一下pixel(picture element),显示图像的最小单位,有多个带色彩的像素点组成的整体就是一张图像。然后再说一下ppi(pixel per inch)这个概念,其实就是在每英寸显示的像素数。 设备像素 && 逻辑像素 &…
【ACM】Uva 1152 (4 Values whose Sum is 0) 二分查找lower_bound() 和upper_bound()的使用
【问题描述】 The SUM problem can be formulated as follows: given four lists A, B, C, D of integer values, compute how many quadruplet (a, b, c, d) ∈ A B C D are such that a b c d 0. In the following, we assume that all lists have the same size n. …
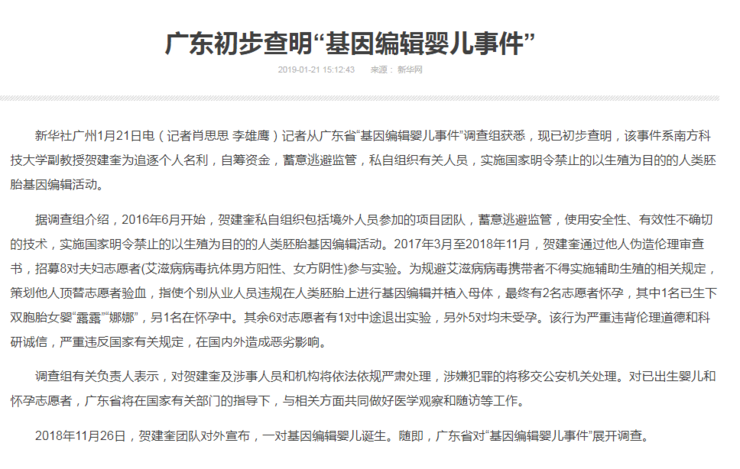
广东“基因编辑婴儿事件”调查组:将对贺建奎依法依规严肃处理
雷锋网(公众号:雷锋网)消息,1 月 21 日,新华社报道了关于“基因编辑婴儿事件”的初步调查结果,该结果宣称,该事件是南方科技大学副教授为了追逐个人名利而进行的人类胚胎基因编辑活动;而在此过程中…
测试我的第一个随笔
# encodingutf-8## Python Version 3.5# 利用数学中的复数 求解 一元一次方程(从网上看来的)def solve(qx, var): qx qx.replace(, -() ) c eval(qx , {var: 1j}) return -c.real/c.imagres solve(2*x 4 8,x)print(res)转载于:https://www.cnblogs.com/imyjy/p/…
ubuntu16.04 下安装Opencv2.4.9
ubuntu16.04 下安装Opencv2.4.9 OpenCV的源码download from: https://sourceforge.net/projects/opencvlibrary/?sourcetyp_redirect[plain] view plaincopycd opencv-2.4.9 mkdir build sudo chmod -R 777 build cd build [plain] view plaincopycmake -D CMAKE_…
UVa 167(八皇后)、POJ2258 The Settlers of Catan——记两个简单回溯搜索
UVa 167 题意:八行八列的棋盘每行每列都要有一个皇后,每个对角线上最多放一个皇后,让你放八个,使摆放位置上的数字加起来最大。 参考:https://blog.csdn.net/xiaoxiede_wo/article/details/79973171 1 #include <io…

AR + ROS +UBUNTU16.04+ORB-SLAM2
ORB SLAM2 USB摄像头 实验环境ubuntu 16.04ros kinetic OPencv2.4.9 Step1: 配置环境变量 $ mkdir -p ~/catkin_ws/src $ cd ~/catkin_ws/src 在’src’目录中可能没有任何软件包,只有一个CMakeLists.txt,依然可以编译它: …

Cross-validation
2019独角兽企业重金招聘Python工程师标准>>> 1: Introduction To Validation So far, weve been evaluating accuracy of trained models on the data the model was trained on. While this is an essential first step, this doesnt tell us much about how well …
【ACM】杭电OJ 1877 又一版A+B(进制转换)
注意:A和B都是0的情况 A和B为int也可以AC #include<cstdio> #include <iostream> using namespace std;const int maxn 10000;int a[maxn];int main() {long long A,B;int m,k;while(scanf("%d",&m)!EOF){if(m0) return 0;scanf("…
[POI2009]KAM-Pebbles BZOJ1115 [ 待填坑 ] 博弈
有N堆石子,除了第一堆外,每堆石子个数都不少于前一堆的石子个数。两人轮流操作每次操作可以从一堆石子中移走任意多石子,但是要保证操作后仍然满足初始时的条件谁没有石子可移时输掉游戏。问先手是否必胜。 感谢MT大牛翻译. Sample OutputNIE…
ROS中使用摄像头的问题
ROS中使用摄像头的问题 0.prepare 4 . 安装uvc_cam $ sudo apt-get install ros-indigo-uvc-camera $ source /opt/ros/indigo/setup.bash 采用apt-get的方式,直接装在了ROS的安装路径中,并设置工作路径。 安装成功后在/opt/ros/hydro/的路径中就…
EmEditor Professional(文本编辑) 下载地址
http://www.greenxf.com/soft/2126.html 16.1.5 http://www.cr173.com/soft/3031.html 16.3.0 http://www.pc6.com/softview/SoftView_43146.html 17.8.1 绿色注册版 EmEditor 71 个实用插件汉化版 http://www.onlinedown.net/soft/35609.htm
【ACM】杭电OJ 4548 美素数(二次打表)
二次打表,第一次是标记哪些是素数,哪些不是。 第二次是前n个数中 “本身是素数 && 各个位上的和是素数 ” 的个数 TLE: #include <iostream> #include <cstdio> using namespace std;int fun1(int x) {int sum0…