转:http://blog.csdn.net/zhouzhuan2008/article/details/11053877
目录
- MTD总概述
- MTD数据结构
- MTD相关层实现
字符设备和块设备的区别在于前者只能被顺序读写,后者可以随机访问;同时,两者读写数据的基本单元不同。
字符设备,以字节为基本单位,在Linux中,字符设备实现的比较简单,不需要缓冲区即可直接读写,内核例程和用户态API一一对应,用户层的Read函数直接对应了内核中的Read例程,这种映射关系由字符设备的file_operations维护。
块设备,则以块为单位接受输入和返回输出。对这种设备的读写是按块进行的,其接口相对于字符设备复杂,read、write API没有直接到块设备层,而是直接到文件系统层,然后再由文件系统层发起读写请求。
同时,由于块设备的IO性能与CPU相比很差,因此,块设备的数据流往往会引入文件系统的Cache机制。
MTD设备既非块设备也不是字符设备,但可以同时提供字符设备和块设备接口来操作它。
MTD总概述
Linux中MTD的所有源码位于/drivers/mtd子目录下,
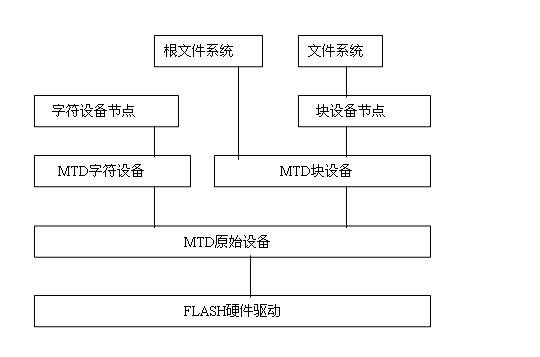
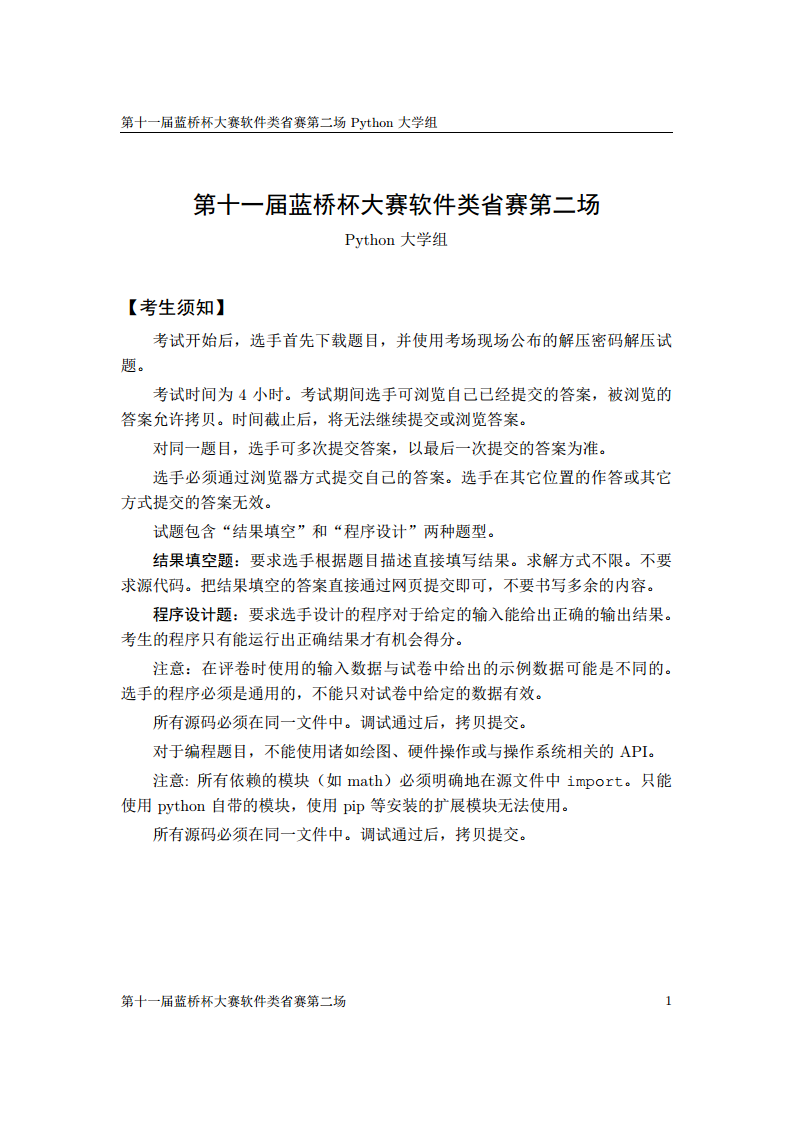
MTD设备通常可分为四层
这四层从上到下依次是:设备节点、MTD设备层、MTD原始设备层和硬件驱动层。
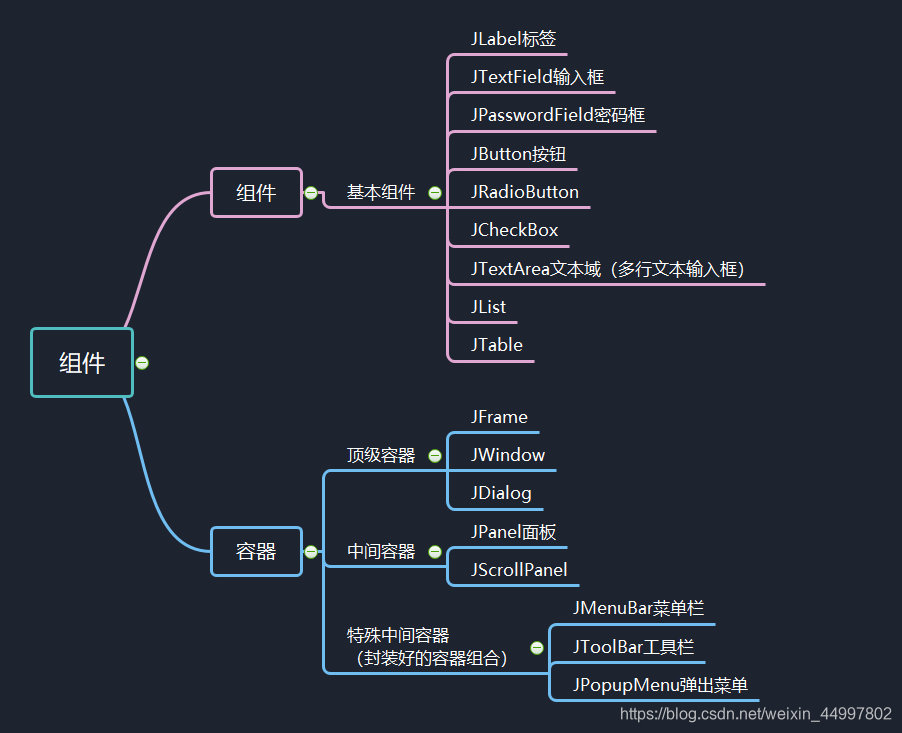
一、Flash硬件驱动层
硬件驱动层负责在init时驱动Flash硬件并建立从具体设备到MTD原始设备映射关系
tip: 映射关系通常包括 分区信息、I/O映射及特定函数的映射
drivers/mtd/chips : CFI/jedec接口通用驱动
drivers/mtd/nand : nand通用驱动和部分底层驱动程序
drivers/mtd/maps : nor flash映射关系相关函数
drivers/mtd/devices: nor flash底层驱动
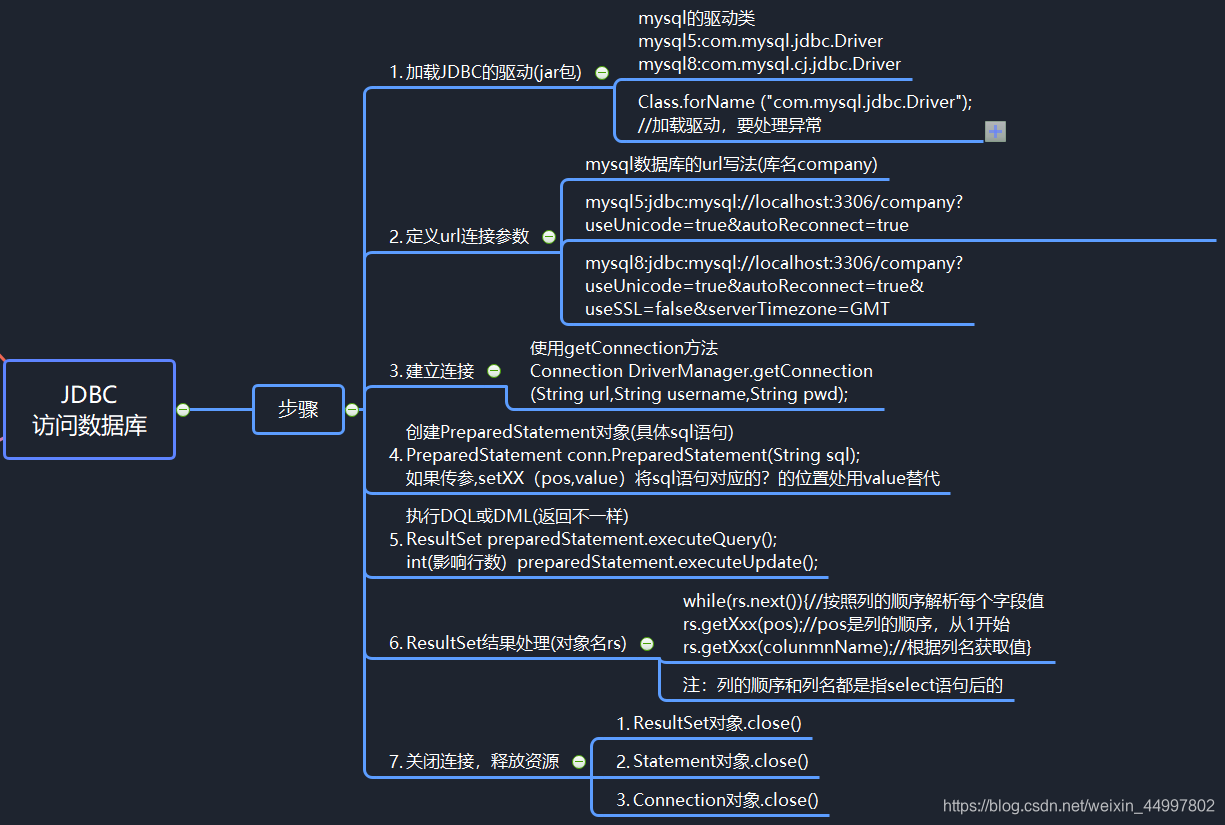
二、MTD原始设备
用于描述MTD原始设备的数据结构是mtd_info,它定义了大量的关于MTD的数据和操作函数。
mtdcore.c : MTD原始设备接口相关实现
mtdpart.c : MTD分区接口相关实现
三、MTD设备层
基于MTD原始设备,linux系统可以定义出MTD的块设备(主设备号31)和字符设备(设备号90)。
mtdchar.c : MTD字符设备接口相关实现
mtdblock.c : MTD块设备接口相关实现
四、设备节点
通过mknod在/dev子目录下建立MTD块设备节点(主设备号为31)和MTD字符设备节点(主设备号为90)
通过访问此设备节点即可访问MTD字符设备和块设备
具体参考: working-with-mtd-devices
五、文件系统
内核启动后,通过mount 命令可以将flash中的其余分区作为文件系统挂载到mountpoint上。
MTD数据结构
重要的数据结构:
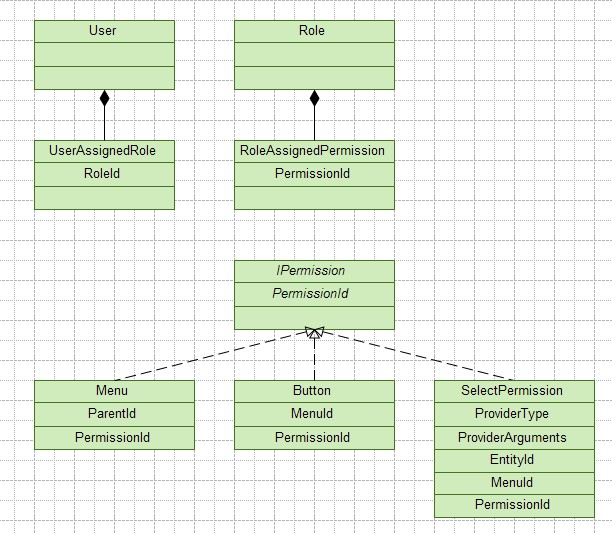
1. mtd_info 表示mtd原始设备, 所有mtd_info结构体被存放在mtd_info数组mtd_table中
2. mtd_part 表示MTD分区,其中包含了 mtd_info,每一个分区都是被看成一个MTD 原始设备
在mtd_table中,mtd_part.mtd_info中的大部分数据都从该分区的主分区mtd_part->master中获得
tip: master不作为一个mtd原始设备加入mtd_table
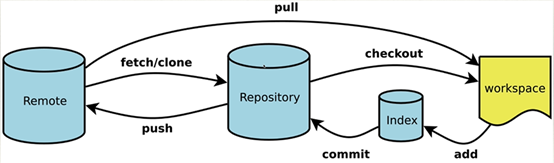
各层之间的交互如下图

mtd_info的主要数据结构
| 域 | 作用 |
| type | mtd类型, 包括MTD_NORFLASH,MTD_NANDFLASH等(See mtd-abi.h) |
| flags | 标志位, MTD_WRITEABLE,MTD_NO_ERASE等(See mtd-abi.h) |
| size | mtd设备的大小 |
| erasesize | 主要的擦除大小, 即Flash的块大小 (tip: mtd设备可能有多个erasesize) |
| writesize | 写大小, 对于norFlash是字节,对nandFlash为一页 |
| oobsize | 每块oob数据量, eg 16 |
| oobavail | |
| name | 命名 |
| index | |
| ecclayout | nand_ecclayout结构体指针, 表示的是ecc布局,可参考硬件手册的OOB中ecc布局 |
| numeraseregions | 可变擦除区域的数目, 通常为1 |
| eraseregions | mtd_erase_region_info结构体指针, 可变擦除区域 |
| erase | 擦除Flash函数 |
| read/write | 读写Flash函数 |
| read_oob/write_oob | 带oob读写Flash函数 |
| suspend/resume | Power Management functions |
| priv | 私有数据, cfi接口flash指向map_info结构, 或指向自定义flash相关结构体 |
mtd_part的主要数据结构
| 域 | 作用 |
| mtd | 分区信息, 大部分由master决定 |
| master | 分区的主分区 |
| offset | 分区的偏移地址 |
| index | 分区号 (3.0后不存在该字段) |
| list | 将mtd_part链成一个链表mtd_partitons |
mtd_partition的主要数据结构
| 域 | 作用 |
| name | |
| size | |
| offset | |
| mask_flags | |
| ecclayout | |
| mtdp | |
map_info的主要数据结构
| 域 | 作用 |
| name | 名称 |
| size | 大小 |
| phys | 物理地址 |
| bankwidth | 总线宽度(in octets) |
| virt | 虚拟地址,通常通过ioremap将物理地址进行映射得到 |
| read/copy_from/write/copy_to | 读写函数 |
| map_priv_1/map_priv_2 | 驱动可用的私有数据 |
nand_chip的主要数据结构
| 域 | 作用 |
| IO_ADDR_R/IO_ADDR_W | 读/写8根io线的地址 |
| read_byte/read_word | 从芯片读一个字节/字 |
| read_buf/write_buf | 读芯片读取内容至缓冲区/将缓冲区内容写入芯片 |
| verify_buf | |
| select_chip | |
| block_bad | 检查是否坏块 |
| block_markbad | 标识坏块 |
| cmd_ctrl | 硬件相关控制函数 |
| init_size | |
| dev_ready | |
| cmdfunc | 命令处理函数 |
| waitfunc | |
| erase_cmd | 擦除命令 |
| scan_bbt | 扫描坏块 |
| errstat | |
| write_page | |
| options | 与具体的NAND 芯片相关的选项, 如NAND_USE_FLASH_BBT等(nand.h) |
| page_shift | |
| ecclayout | nand_ecclayout类型结构体, ECC布局信息 |
| ecc | nand_ecc_ctrl类型结构体, ECC控制结构 |
nand_ecclayout的主要数据结构
| 域 | 作用 |
| eccbytes | ecc的字节数(For 512B-per-page, eccbytes is 3) |
| eccpos | ecc数据在oob中的位置 |
| oobavail | oob中可用的字节数, MTD 会根据其它三个变量自动计算得到 |
| oobfree | nand_oobfree类型结构体, 显示定义空闲的oob 字节 |
MTD相关层实现
MTD设备层
mtd字符设备接口:
mtdchar.c 实现了字符设备接口,通过它,用户可以直接操作Flash 设备。
Ø 通过read()、write()系统调用可以读写Flash。
Ø 通过一系列IOCTL 命令可以获取Flash 设备信息、擦除Flash、读写NAND 的OOB、获取OOB layout 及检查NAND 坏块等(MEMGETINFO、MEMERASE、MEMREADOOB、MEMWRITEOOB、MEMGETBADBLOCK IOCRL)
tip: mtd_read和mtd_write直接直接调用mtd_info的read 函数,因此,字符设备接口跳过patition这一层
mtd块设备接口:
主要原理是将Flash的erase block 中的数据在内存中建立映射,然后对其进行修改,最后擦除Flash 上的block,将内存中的映射块写入Flash 块。整个过程被称为read/modify/erase/rewrite 周期。
但是,这样做是不安全的,当下列操作序列发生时,read/modify/erase/poweroff,就会丢失这个block 块的数据。
块设备模拟驱动按照block 号和偏移量来定位文件,因此在Flash 上除了文件数据,基本没有额外的控制数据。
MTD原始设备层
MTD硬件驱动层
1. NOR Flash驱动结构
Linux系统实现了针对cfi,jedec等接口的通用NOR Flash驱动
在上述接口驱动基础上,芯片级驱动较简单
定义具体内存映射结构体map_info,然后通过接口类型后调用do_map_probe()
以h720x-flash.c为例(位于drivers/mtd/maps)
- 定义map_info结构体, 初始化成员name, size, phys, bankwidth
- 通过ioremap映射成员virt(虚拟内存地址)
- 通过函数simple_map_init初始化map_info成员函数read,write,copy_from,copy_to
- 调用do_map_probe进行cfi接口探测, 返回mtd_info结构体
- 通过parse_mtd_partitions, add_mtd_partitions注册mtd原始设备
2. NAND Flash驱动结构
Linux实现了通用NAND驱动(drivers/mtd/nand/nand_base.c)
tip: For more, check 内核中的NAND代码布局
芯片级驱动需要实现nand_chip结构体
MTD使用nand_chip来表示一个NAND FLASH芯片, 该结构体包含了关于Nand Flash的地址信息,读写方法,ECC模式,硬件控制等一系列底层机制。
Ø NAND芯片级初始化
主要有以下几个步骤:
- 分配nand_chip内存,根据目标板及NAND控制器初始化nand_chip中成员函数(若未初始化则使用nand_base.c中的默认函数),将mtd_info中的priv指向nand_chip(或板相关私有结构),设置ecc模式及处理函数
- 以mtd_info为参数调用nand_scan()探测NAND FLash。
nand_scan()会读取nand芯片ID,并根据mtd->priv即nand_chip中成员初始化mtd_info
- 若有分区,则以mtd_info和mtd_partition为参数调用add_mtd_partitions()添加分区信息
-
Ø MTD对NAND芯片的读写
主要分三部分:
A、struct mtd_info中的读写函数,如read,write_oob等,这是MTD原始设备层与FLASH硬件层之间的接口;
B、struct nand_ecc_ctrl中的读写函数,如read_page_raw,write_page等,主要用来做一些与ecc有关的操作;
C、struct nand_chip中的读写函数,如read_buf,cmdfunc等,与具体的NAND controller相关,就是这部分函数与硬件交互,通常需要我们自己来实现。
tip: nand_chip中的读写函数虽然与具体的NAND controller相关,但是MTD也为我们提供了默认的读写函数,如果NAND controller比较通用(使用PIO模式),那么对NAND芯片的读写与MTD提供的这些函数一致,就不必自己实现这些函数。
上面三部分读写函数相互配合完成对NAND芯片的读写
首先,MTD上层需要读写NAND芯片时,会调用struct mtd_info中的读写函数,接着struct mtd_info中的读写函数就会调用struct nand_chip或struct nand_ecc_ctrl中的读写函数,最后,若调用的是struct nand_ecc_ctrl中的读写函数,那么它又会接着调用struct nand_chip中的读写函数。
eg: 以读为例
MTD上层会调用struct mtd_info中的读page函数,即nand_read函数。
接着nand_read函数会调用struct nand_chip中cmdfunc函数,这个cmdfunc函数与具体的NAND controller相关,它的作用是使NAND controller向NAND 芯片发出读命令,NAND芯片收到命令后,就会做好准备等待NAND controller下一步的读取。
接着nand_read函数又会调用struct nand_ecc_ctrl中的read_page函数,而read_page函数又会调用struct nand_chip中read_buf函数,从而真正把NAND芯片中的数据读取到buffer中(所以这个read_buf的意思其实应该是read into buffer,另外,这个buffer是struct mtd_info中的nand_read函数传下来的)。
read_buf函数返回后,read_page函数就会对buffer中的数据做一些处理,比如校验ecc,以及若数据有错,就根据ecc对数据修正之类的,最后read_page函数返回到nand_read函数中。
对NAND芯片的其它操作,如写,擦除等,都与读操作类似
http://www.cnblogs.com/hzl6255/archive/2012/12/18/2824043.html
MTD(memory technology device内存技术设备)是用于访问memory设备(ROM、flash)的Linux的子系统。MTD的主要目的是为了使新的memory设备的驱 动更加简单,为此它在硬件和上层之间提供了一个抽象的接口。MTD的所有源代码在/drivers/mtd子目录下。我将CFI接口的MTD设备分为四层 (从设备节点直到底层硬件驱动),这四层从上到下依次是:设备节点、MTD设备层、MTD原始设备层和硬件驱动层。
一、Flash硬件驱动层:硬件驱动层负责在init时驱动Flash硬件,Linux MTD设备的NOR Flash芯片驱动遵循CFI接口标准,其驱动程序位于drivers/mtd/chips子目录下。NAND型Flash的驱动程 序则位于/drivers/mtd/nand子目录下。
二、MTD原始设备:原始设备层有两部分组成,一部分是MTD原始设备的通用代码,另一部分是各个特定的Flash的数据,例如分区。 用于描述MTD原始设备的数据结构是mtd_info,这其中定义了大量的关于MTD的数据和操作函数。mtd_table(mtdcore.c)则是所 有MTD原始设备的列表,mtd_part(mtd_part.c)是用于表示MTD原始设备分区的结构,其中包含了mtd_info,因为每一个分区都 是被看成一个MTD原始设备加在mtd_table中的,mtd_part.mtd_info中的大部分数据都从该分区的主分区 mtd_part->master中获得。 在drivers/mtd/maps/子目录下存放的是特定的flash的数据,每一个文件都描述了一块板子上的flash。其中调用 add_mtd_device()、del_mtd_device()建立/删除mtd_info结构并将其加入/删除mtd_table(或者调用 add_mtd_partition()、del_mtd_partition()(mtdpart.c)建立/删除mtd_part结构并将 mtd_part.mtd_info加入/删除mtd_table 中)。
三、MTD设备层:基于MTD原始设备,linux系统可以定义出MTD的块设备(主设备号31)和字符设备(设备号90)。MTD字符设备的定义在 mtdchar.c中实现,通过注册一系列file operation函数(lseek、open、close、read、write)。MTD块设备则是定义了一个描述MTD块设备的结构 mtdblk_dev,并声明了一个名为mtdblks的指针数组,这数组中的每一个mtdblk_dev和mtd_table中的每一个 mtd_info一一对应。
四、设备节点:通过mknod在/dev子目录下建立MTD字符设备节点(主设备号为90)和MTD块设备节点(主设备号为31),通过访问此设备节点即可访问MTD字符设备和块设备。
五、根文件系统:在Bootloader中将JFFS(或JFFS2)的文件系统映像jffs.image(或jffs2.img)烧到flash的 某一个分区中,在/arch/arm/mach-your/arch.c文件的your_fixup函数中将该分区作为根文件系统挂载。
六、文件系统:内核启动后,通过mount 命令可以将flash中的其余分区作为文件系统挂载到mountpoint上。
http://www.cnblogs.com/hoys/archive/2012/05/30/2526230.html
//----------------------------------------------个人见解----------------------------------------
1、linux nandflash驱动主要工作在于nand_chip结构体填充(linux内核在MTD的下层实现了通用的nand驱动(主要通过drivers/mtd/nand_base.c文件实现),因此芯片级的nand驱动不再需要实现mtd_info中的read、write、read_oob等函数,而主体转移到了nand_chip数据结构体填充上)、内核flash分区表配置两部分,而nand_chip结构体填充驱动一般芯片厂商提供的开发包中会有这个驱动,例如dm365的nand_chip结构体填充驱动就是drivers/mtd/nand/davinvi-nand.c
在davinvi-nand.c驱动中,会涉及到一个ecc布局的结构体struct nand_ecclayout如下:
static struct nand_ecclayout hwecc4_small __initconst = {
.eccbytes = 10,
.eccpos = { 0, 1, 2, 3, 4,
/* offset 5 holds the badblock marker */
6, 7,
13, 14, 15, },
.oobfree = {
{.offset = 8, .length = 5, },
{.offset = 16, },
},
};
nand_ecclayout结构体指针, 表示的是ecc布局,可参考硬件手册的OOB中ecc布局。
下面是相关的一些成员介绍:
struct nand_ecclayout {
uint32_t eccbytes; //表示使用几个ecc字节
uint32_t eccpos[128]; //表示ecc占用的位置,因为现在大页面4kbyte也就128个,所以这里写了128,
//以后有更大页面的,这里也要改了。
uint32_t oobavail; //有几个oob可用,这个跟下面的成员有点像,一般用下面的
struct nand_oobfree oobfree[MTD_MAX_OOBFREE_ENTRIES]; //定义oob有效个数,从哪开始等
};
给个例子:
static struct nand_ecclayout mylayout = {
#ifdef CONFIG_SYS_NAND_PAGE_2K
.eccbytes = 40,
.eccpos = {
24, 25, 26, 27, 28,
29, 30, 31, 32, 33, 34, 35, 36, 37, 38,
39, 40, 41, 42, 43, 44, 45, 46, 47, 48,
49, 50, 51, 52, 53, 54, 55, 56, 57, 58,
59, 60, 61, 62, 63,
},
.oobfree = {
{.offset = 2, .length = 22, },
},
#endif
}
其中,.eccbytes = 40,跟初始化有关系,我们一般这样初始化:
nand->ecc.size = 512;
nand->ecc.bytes = 10;
恩,这下明朗了,我们需要每512个字节产生10个ecc字节,因此对2kbyte页面的flash来说,一页就是4个512,因此需要4*10=40个ecc字节。
.eccpos就是告诉驱动,这些ecc字节放在哪里,一般是按顺序存放,不要覆盖芯片默认的坏块标记位,对2kbyte的flash来说,厂家说是前两个即第0、1个字节是坏块标志。
所以分配为eccbytes和eccpos后,后面有个oobfree,这样看来也很明白了:
offset=2表示从第2个字节开始(因为前面2个是坏块标志啊~~),length=22表示(从offset开始)共22个ecc字节可以用户随便用。
这下一目了然了吧。
2、有了nand_chip结构体填充驱动了,接下来需要往系统注册一个nand flash设备了,一般情况是在板级初始化的代码中,一般目录是arch/arm/mach****/****.c文件(或者也有可能在devices.c中),在这个文件中,一般会包括定义nandflash分区信息结构,注册nandflash设备,其中还包括了定义一些IO资源,用于主控器驱动获得IO资源配置相应的寄存器以及数据读取。例如dm365的板级初始化文件:arch/arm/mach-davinci/board-dm365-evm.c中:
#define NAND_BLOCK_SIZE(SZ_16K)//32MB or 64MB
static struct mtd_partition nand_partitions[] = {
/* bootloader (UBL, U-Boot, BBT) in sectors: 0 - 14 */
{
.name = "bootloader",
.offset = 0,
.size = 32 * NAND_BLOCK_SIZE,
.mask_flags = MTD_WRITEABLE,/* force read-only */
},
/* bootloader params in the next sector 15 */
{
.name = "params",
.offset = MTDPART_OFS_APPEND,
.size = 96 * NAND_BLOCK_SIZE,
.mask_flags = MTD_WRITEABLE,/* force read-only */
},
/* kernel in sectors: 16 */
{
.name = "kernel",
.offset = MTDPART_OFS_APPEND,
.size = SZ_2M,
.mask_flags = 0
},
{
.name = "filesystem1",
.offset = MTDPART_OFS_APPEND,
.size = SZ_16M,//SZ_16M + SZ_8M,
.mask_flags = 0
},
{
.name = "filesystem2",
.offset = MTDPART_OFS_APPEND,
.size = SZ_2M,//SZ_8M,
.mask_flags = 0
},
{
.name = "Calibration",
.offset = MTDPART_OFS_APPEND,
.size = MTDPART_SIZ_FULL,
.mask_flags = 0
}
};
上面是nandflash分区信息定义结构体,在上面结构体中,总共为nandflash分成了6个区,在系统启动后,可以通过ls /dev/mtdblock*查看到所有的分区,看到的mtdblock*设备文件节点从0开始分别对应上面数组中的六个分区,如果需要使用哪个分区,则可以通过mount挂载到文件系统中使用。也能通过系统启动时打印的信息看到分区情况:
Creating 6 MTD partitions on "nand_davinci.0":
0x00000000-0x00080000 : "bootloader"
0x00080000-0x00200000 : "params"
0x00200000-0x00400000 : "kernel"
0x00400000-0x01400000 : "filesystem1"
0x01400000-0x01600000 : "filesystem2"
0x01600000-0x04000000 : "Calibration"
按照上面信息可以看出,文件系统是保存在0x00400000-0x01400000或者0x01400000-0x01600000地址段中(后面假设系统是只用filesystem1),内核是保存0x00200000-0x00400000地址段中,所以在烧录内核时,应该使用nand write 0x80700000 0x00200000 0x00300000(其中0x00300000表示写入大小,0x00200000表示写入nandflash的起始地址,0x80700000表示从内存的这个地址读出内核烧写到对应的nandflash地址中),而烧录文件可以通过网络文件系统启动板子,再将上面的filesystem1挂载在mnt/目录下:mount /dev/mtdblock3 /mnt/mtd3,然后直接将要烧录的文件系统解压到这个filesystem1分区中,也能通过网络上其它方式烧录文件系统,如yaffs jffs2等等,烧钱文件系统前,必须通过nand erase在uboot阶段擦除这块地址段中的flash数据,如擦写filesystem1的数据命令:nand erase 0x00400000 ********* (***表示擦写块大小)
static struct resource nand_resources[] = {
[0] = {
/* First memory resource is AEMIF control registers */
.start = DM365_ASYNC_EMIF_CNTRL_BASE,
.end = DM365_ASYNC_EMIF_CNTRL_BASE + SZ_4K - 1,
.flags = IORESOURCE_MEM,
},
[1] = {
/* Second memory resource is NAND I/O window */
.start = DAVINCI_ASYNC_EMIF_DATA_CE0_BASE,
.end = DAVINCI_ASYNC_EMIF_DATA_CE0_BASE + SZ_16K - 1,
.flags = IORESOURCE_MEM,
},
[2] = {
/* Third (optional) memory resource is NAND I/O window */
/* for second NAND chip select */
.start = DAVINCI_ASYNC_EMIF_DATA_CE0_BASE + SZ_16K,
.end = DAVINCI_ASYNC_EMIF_DATA_CE0_BASE + 2 * SZ_16K - 1,
.flags = IORESOURCE_MEM,
},
};
上面数组中定义的是nandflash接口(一般接在EMIF上)的IO内存资源,需要注意的是,这个数组如何定义取决于nandflash驱动(drivers/mtd/nand/davinvi-nand.c)中代码是如何使用这些资源的,比如说davinci-nand.c获取资源是platform_get_resource(pdev, IORESOURCE_MEM, 0),而获取的这个资源是用于控制寄存器配置的,则上面数组中0成员就必须是EMIF控制寄存器的IO内存地址,如果这个资源是用于访问nandflash数据的,则0数组的成员就必须是EMIF数据寄存器。所以这个数组的定义需要配置davinci-nand.c驱动的编写来更改。