QGC地面站参数调节
校准:
1.选择机架:一般用DJI Flame Wheel F450机架,选择之后点击“应用并重启”;
2.传感器校准:无人机会重新连接地面站,依次校准“磁罗盘”、“陀螺仪”,“加速度计”、“地平线”;(注意:横平竖直)
3.遥控器校准:点击“校准”,按照提示调节映射,最后点击“下一步”,完成遥控器校准;
4.飞行模式:选择通道,主要使用遥控器的“飞行模式”以及“Kill switch channel”两个通道;
5.电源校准:根据选择的电池芯数进行校准,在这里需要进行电调校准(数据线连接),点击下面的“校准”,回提示插电池,电调校准完成将电池拿下来;
6.安全设置:在这里主要进行安全方面的设置,但是一般用不到,也可进行设置相对较为安全一点;
7.参数设置:最主要的就是进行参数设定,这里慢慢补充…
参数设置:(慢慢更新…)
(一)禁用安全开关:搜索“CBRK_IO_SAFETY”将参数从0修改为最大值;
(二)修改系统id:搜索“MAV_SYS_ID”,修改为想要的id号;
(三)修改PID:调节内环、外环,内环是调节速率的PID,外环仅有P的参数,一般调节的是内环的PID,主要是调节的是横滚、俯仰的PID,调节的时候一般先调节P,后调节D,最后调节I的参数,直至无人机完全稳定。(需要实地操作才能看的出来)
调节步骤:
1.调节内环的PID(Multicopter Attitude Control):主要先调节MC_PITCHRATE_P以及MC_ROLLRATE_P,两个参数需要调节一样的数值,慢慢往上增加,不能太大,调节到快要超调的临界点时,进而调节D,即MC_PITCHRATE_D和MC_ROLLRATE_D的参数,慢慢往上增加,调节到无人机非常稳定无超调;
2.调节位置内环(Multicopter Position Control):主要先进行内环的xy平面调节,参数为MPC_XY_VEL_P和MPC_XY_VEL_D,根据无人机飞行情况进行调节,其次进行MPC_Z_VEL_P和MPC_Z_VEL_D调节;
3.调节位置外环(Multicopter Position Control):主要先进行外环的xy平面调节,参数为MPC_XY_P和MPC_XY_D,根据无人机飞行情况进行调节,其次进行MPC_Z_P和MPC_Z_D调节;
4.调节内环PID(Multicopter Attitude Control):主要先调节MC_PITCH_P以及MC_ROLL_P,两个参数需要调节一样的数值,可以将其调节到相对较大值然后进而向下调节;
至此,无人机的PID参数调节就是这样。
修改定高模式
分为气压计定高和GPS定高;在EKF2中找到EKF2_HGT_MODE模式选择Barometric pressure(气压计)和GPS(RTK使用这个)还有其余两个一般不常用。
相关文章:
Object类解析
声明:该Java常用类分析基于JDK1.8 Object类 概述 官方介绍: 翻译内容: Object类是类层次结构的根。每个类都有Object作为父类。所有对象,包括数组,都实现这个类的方法。 其中class hierarchy这个词组翻译为类的继承…
用Python构建网页抓取器
借助使用Python构建的尖端网页抓取技术,启动您的大数据项目 Scrape the Planet! Building Web Scrapers with Python 你会学到什么 如何理论化和开发用于数据分析和研究的网页抓取器和蜘蛛 什么是刮刀和蜘蛛? 刮刀和蜘蛛有什么区别? 刮刀和蜘…

Apache JMeter2.13 实战
安装目录下 设置浏览器代理127.0.0.1 8080,以chrome为例 开始录制脚本,进入应用点击相应的功能,可以捕获到如下地址 去除无用地址,保留需要测试的地址 注:上图编号列表中11为获取cookie请求,不能删除&#…

大数据系列6:HBase – 基于Hadoop的分布式数据库
2019独角兽企业重金招聘Python工程师标准>>> wget http://mirrors.cnnic.cn/apache/zookeeper/zookeeper-3.4.5/zookeeper-3.4.5.tar.gz tar -xzvf zookeeper-3.4.5.tar.gz cd zookeeper-3.4.5 cp conf/zoo_sample.cfg conf/zoo.cfg vi conf/zoo.cfg 修改&…
下载源码、编译
源码官网:https://github.com/PX4/Firmware/ 在Branch:master中选择第二个Tags下面就是源码版本,可以选择下载最新版本。 下载指令 git clone -b v1.11.0 https://github.com/PX4/Firmware.git --recursive 根据下载的版本更换版本号,这里下…

CSS、JavaScript、PHP和Python编程合二为一
CSS, JavaScript,PHP And Python Programming All in One Course 在一门课程中学习Javascript、PHP和Python编程语言的CSS 你会学到: CSS和JavaScript概念介绍,PHP编程语言和Python编程语言 编写CSS脚本和理解概念 CSS样式、CSS 2D变换、CSS三维变换入门 Javascrip…

maven工程出现java.lang.ClassNotFoundException: org.springframework.web.context.ContextLoaderListener...
经过百度,发现网上很多方法虽然描述的错误和我的一样,但是发现都不适我自身的这种情况.后来我自己解决了.解决方法如下: 接着:update一下工程 最后:就可以直接在这里run一下了. 转载于:https://www.cnblogs.com/fengxuanyuan/p/5210910.html
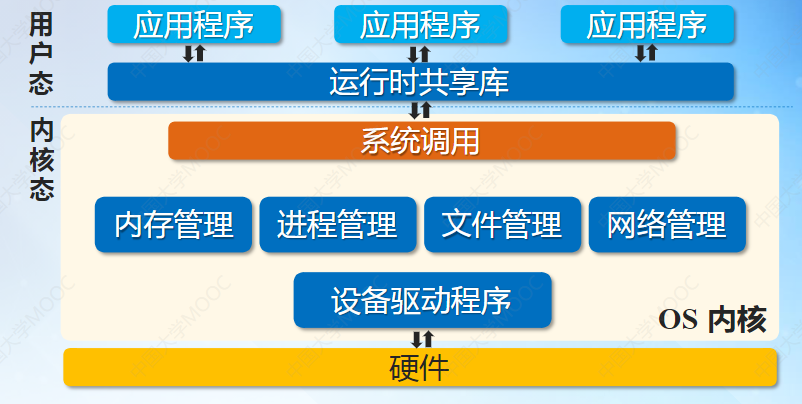
操作系统学习1:操作系统概述
操作系统概述 什么是操作系统? 操作系统(Operating System,简称OS)是一个系统软件,它管理计算机的软硬件资源,并为计算机程序提供服务。 操作系统的五大功能 文件管理 文件管理包括:存储空间…

1578: [Usaco2009 Feb]Stock Market 股票市场
1578: [Usaco2009 Feb]Stock Market 股票市场 Time Limit: 10 Sec Memory Limit: 64 MBSubmit: 414 Solved: 199[Submit][Status][Discuss]Description 尽管奶牛们天生谨慎,她们仍然在住房抵押信贷市场中受到打击,现在她们开始着手于股市。 Bessie很有…
代码部分分区域突破
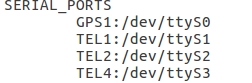
代码结构 board部分 在这里主要是用到了里面的px4部分,里面包含各种编译版本,主要现在用的就是fmu-v5版本,打开后里面需要在default.cmake里面找到MODULES,在下面添加自己写的文件名字。 这里是有四个串口,如果设备想要获取信息…

用Python和项目进行机器学习(初学者) Machine Learning A-Z with Python with Project (Beginner)
初学者用Python完成机器学习课程 你会学到: Python上的主机器学习 进行有力的分析 做出准确的预测 制作健壮的机器学习模型 将机器学习用于个人目的 建立一支强大的机器学习模型大军,并知道如何将它们结合起来解决任何问题 使用K-均值聚类、支持向量机(SVM)、KNN、…

操作系统学习2:操作系统的发展和概览
操作系统的发展和概览 手工阶段(电子管时代) 特点: 用户独占全机 用户独占计算机所有资源,资源利用率低CPU等待用户 计算前,手工装入纸带或卡片;计算完成后,手工卸取纸带或卡片;C…
java内存数据管理
准确的说应该是java8以前的内存管理方式 区别在永久代(方法区)上 public class RamManager {//1.a存储于永久代public static int a 1;private String str;private int x;private AA aaa; // method_1方法位于栈中// temp1保存的是引用地址,在栈中public void me…

职责链模式(Chain of Responsibility)(对象行为型)
1.概述 你去政府部门求人办事过吗?有时候你会遇到过官员踢球推责,你的问题在我这里能解决就解决,不能解决就推卸给另外个一个部门(对象)。至于到底谁来解决这个问题呢?政府部门就是为了可以避免屁民的请求与…
Ubuntu使用QCustomPlot简介
参考网址 https://blog.csdn.net/zyc_csdn/article/details/78840376 显示实时数据 https://blog.csdn.net/qq_28877125/article/details/102948574?ops_request_misc&request_id&biz_id102&utm_termQcustomPlot%E4%BD%BF%E7%94%A8%E5%AE%9E%E6%97%B6%E5%8A%A8%E6…

Python入门基础教程 Working with Python – Introductory Level
学会像计算机科学家一样用世界上最流行的编程语言之一思考 你会学到: 学习Python的基础知识,Python是当今最流行的编程语言之一 通过编写一个基于文本的冒险游戏来学习Python语言的语法 了解面向对象编程和过程编程的区别 学会像计算机科学家一样思考:做决定、循环…
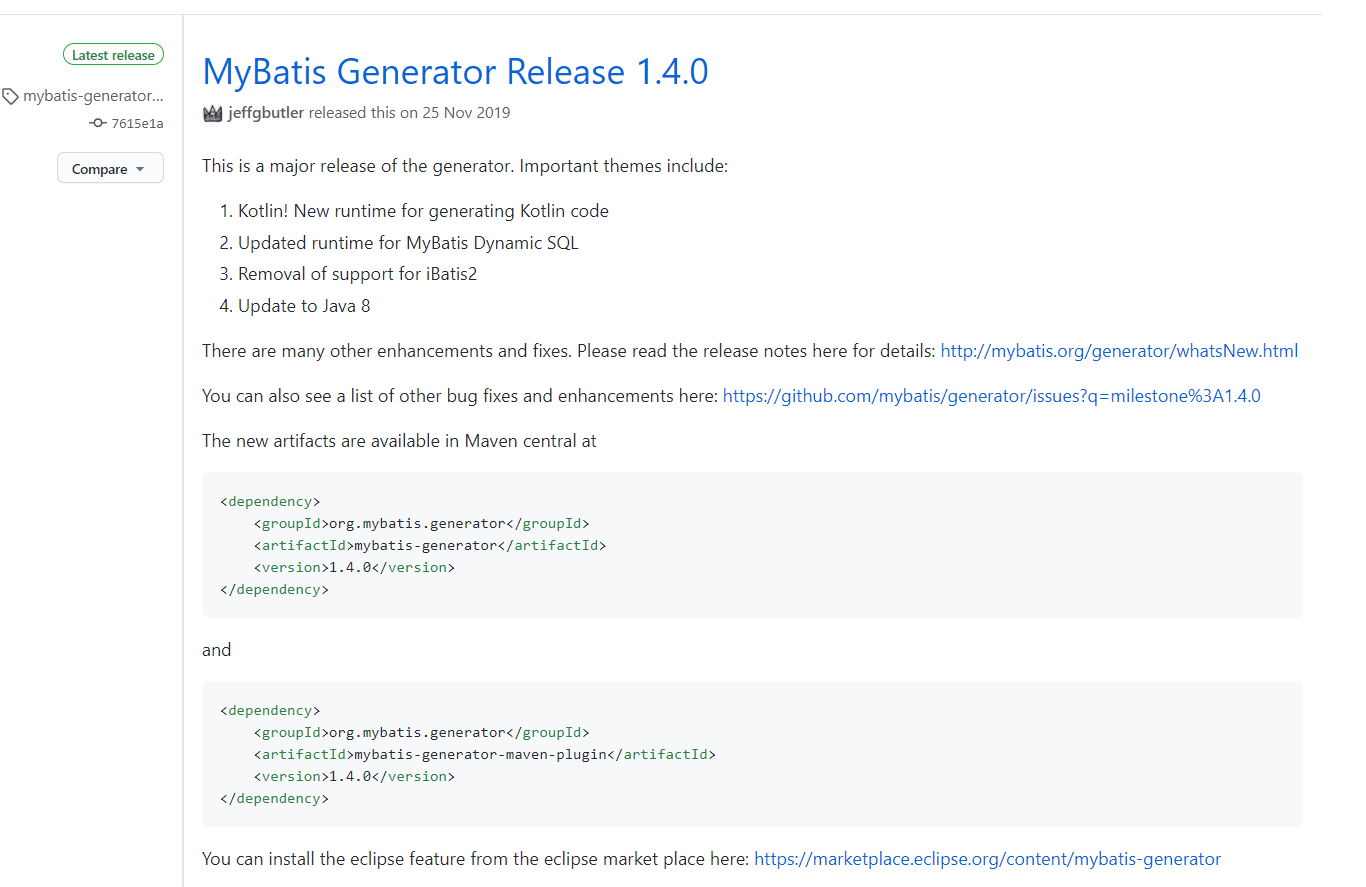
MyBatis复习笔记5:MyBatis代码生成器
前言:做过几个项目之后深感代码生成器的便捷,有了它我们可以少写许多重复的、基础的代码,如基本的增删改查的代码,我们可以交给代码生成器生成,而我们只需要专注于业务逻辑上的代码即可。 MyBatis Generator MyBatis官…
QT报错“qt.network.ssl: QSslSocket: cannot resolve SSLv2_client_method”
出现错误找这里:https://blog.csdn.net/u010168781/article/details/85632637
数据科学Python训练营课程:从初级到高级 Python for Data Science Bootcamp Course:Beginner to Advanced
通过代码实现、示例等,掌握您需要了解的关于Python、Pandas和Numpy的一切! 你会学到什么 通过代码实现、示例等,掌握您需要了解的关于Python、Pandas和Numpy的一切! 学习高级Python模块和复杂功能,如Python装饰器、生…
MyBatis复习笔记6:MyBatis缓存机制
MyBatis缓存机制 MyBatis 包含一个非常强大的查询缓存特性,它可以非常方便地配置和定制。缓存可以极大的提升查询效率。MyBatis系统中默认定义了两级缓存。一级缓存和二级缓存。 默认情况下,只有一级缓存(SqlSession级别的缓存,也…

JAVA语法基础 3
一.实战演练 1.编写Java程序,声明2个int型变量,运用3元远算符判断两个变量是否相等,若不相等,求出两个数中较大的。 public class 练习题 { public static void main(String[] args) { int a1; int b2; Sys…
堆排序示例-java
package Heapsort; public class TestMain { /** * 调整堆 * param array 数组 * param i 调整的元素i * param length 堆元素个数 */ public static void adaptationArray(int[] array,int i, int length) { // 当前元素 int cur i; while(2*cur2<length) { int curValue …
创建新的ros工作空间
链接:https://www.cnblogs.com/ailitao/p/11047312.html

Blender左轮手枪制作教程
Artstation – Revolver Tutorial – Industry Ready Weapon & Attachment Creation for Video Games 持续时间19h 包含项目文件 1280X720 MP4 语言:英语中英文字幕(根据原英文字幕机译更准确) 大小解压后:16.6G 标题:艺术站-…
设计模式学习1:设计模式简述和设计模式原则
设计模式简述 什么是设计模式? 软件工程中,设计模式(design pattern)是对软件设计中普遍存在(反复出现)的各种问题,所提出的解决方案。 设计模式的目的: 代码高可用(相…
mysql 常用sql与命令
1. 如何禁用和启用mysql外键约束 SET foreign_key_checks 0; 禁用外键SOURCE dump_file_name; 进行SQL查询 SET foreign_key_checks 1; 恢复外键 2. 把字段改为自动增长 SET foreign_key_checks 0; ALTER TABLE zz_news MODIFY COLUMN id BIGINT(20) NOT NULL AUTO…
需要恢复中断状态的一个场景
没有恢复中断状态时,在Step1执行期间发生中断,Step2操作还会继续,这就存在让数据出现不一致的风险: import java.util.concurrent.TimeUnit;import org.slf4j.Logger; import org.slf4j.LoggerFactory;/*2015-4-9*/ public class …
新建ROS工作工作空间
空间解释: src:代码空间(放置功能包:代码、配置文件、.launch文件) build:编译空间(编译文件:编译过程中产生的,不必去关心的) devel:开发空间(放置编译生成的可执行文件…

用Rhino V7建造机甲学习教程 Building a Mecha using Rhino V7
MP4 |视频:h264,1280720 |音频:AAC,44.1 KHz,2 Ch 语言:英语中英文字幕(根据原英文字幕机译更准确) |时长:45节课(16h 55m) |大小解压后:10.8 GB 一级和二级初级和中级 你会学到: 通过一个手把手的项目学…

Nginx学习2:Nginx的安装配置和常用命令
Nginx的安装、常用命令和配置文件 在Linux系统安装Nginx 我们使用虚拟机来完成在Linux系统安装Nginx的步骤,在这里我选择的是CentOS7的Linux系统, 1、到官网下载Nginx 官网地址:http://nginx.org/en/download.html 我们选择稳定版的直接下…